Intermediate
โปรเจกต์ Electric Kayak
Project นี้ใช้ Arduino Uno และ battery pack ขนาด 18 volt เพื่อขับเคลื่อน Kayak ขนาด 10 foot ได้อย่างมีประสิทธิภาพ

Project นี้ใช้ Arduino Uno และ battery pack ขนาด 18 volt เพื่อขับเคลื่อน Kayak ขนาด 10 foot ได้อย่างมีประสิทธิภาพ
ภาพรวมโครงการและ สารบัญ
ภาพด้านบนแสดงคอนโซลที่ใช้สำหรับขับเคลื่อนคายัคขนาด 10 ฟุตด้วยพลังงานไฟฟ้า คอนโซลประกอบด้วยคอมพิวเตอร์ Arduino Uno ที่สามารถสร้างสัญญาณ Pulse Width Modulation (PWM) ได้ ส่วน Cytron driver ซึ่งเป็นแผงวงจรขนาด 2 x 3 นิ้วที่วางอยู่ข้าง Uno จะทำหน้าที่แปลสัญญาณ PWM และจ่ายไฟให้กับ trolling motor เหมือนกับการขับเคลื่อนมอเตอร์หุ่นยนต์
ที่ด้านข้างของคอนโซล ใช้แบตเตอรี่แพ็ก Ryobi Lithium ขนาด 4 Ampere Hour (AH) หรือ 6 AH (แบบเดียวกับที่ใช้ในเครื่องมือไร้สาย) เพื่อเป็นแหล่งพลังงานให้กับ trolling motor คอนโซลยังมี voltmeter และ ammeter เพื่อตรวจสอบประจุแบตเตอรี่และกระลังไฟที่ไหลไปยังมอเตอร์ ความเร็วของมอเตอร์ถูกควบคุมด้วย Rotary switch ที่ปรับความเร็วเดินหน้าได้ 6 ระดับ และถอยหลังได้ 3 ระดับ
การควบคุมแบบ PWM ของ Arduino Uno สำหรับ trolling motor ถูกนำมาใช้ในสองรูปแบบ: อย่างแรกคือปรับแรงดันไฟฟ้า 18 volt จากแบตเตอรี่ Lithium-Ion ให้เป็นระดับ 12 volt ตามพิกัดของมอเตอร์ และอย่างที่สองคือใช้ควบคุมความเร็วของมอเตอร์ นี่คือจุดที่ระบบนี้ทำได้ดีเยี่ยม: ปกติ trolling motor ขนาดเล็กจะลดความเร็วลงด้วยการใส่ Resistors เข้าไปในวงจรแบตเตอรี่ ซึ่ง Resistors เหล่านี้จะเปลี่ยนพลังงานแบตเตอรี่ส่วนเกินให้กลายเป็นความร้อนที่ระบายทิ้งลงในน้ำและสูญเสียไปเปล่าๆ ที่ความเร็วต่ำ trolling motor ทั่วไปจะมีประสิทธิภาพเพียงประมาณ 25% แต่เทคนิค PWM สำหรับการควบคุมความเร็วนั้นมีประสิทธิภาพสูงถึง 98% ในทุกระดับความเร็ว
ความสะดวกในการใช้แบตเตอรี่แพ็กเพื่อขับเคลื่อนมอเตอร์ที่โดดเด่นที่สุดคือเรื่องน้ำหนักที่เบา: แบตเตอรี่ขนาด 4 AH หนักเพียง 2 ปอนด์ ง่ายต่อการเสียบเข้ากับคอนโซลหรือเครื่องชาร์จซึ่งสามารถชาร์จไฟจนเต็มได้ในเวลาประมาณ 2 ชั่วโมง แบตเตอรี่สำรองสามารถพกพาได้ง่ายเพื่อเพิ่มระยะทางการล่องเรือ แบตเตอรี่ Lithium ยังเก็บประจุได้ดีเยี่ยมเป็นเวลานานและจ่ายไฟได้เต็มพิกัดในทุกระดับความเร็ว
ส่วนประกอบที่ใช้ในโครงการนี้มีความคุ้มค่าสูงมาก คายัคขนาด 10 ฟุตราคาประมาณ $200, trolling motor ประมาณ $100, แบตเตอรี่ Lithium 4 AH สองก้อนราคา $100 และอีกไม่เกิน $100 สำหรับอุปกรณ์ Electronics และชิ้นส่วนเบ็ดเตล็ดอื่นๆ ที่จำเป็นสำหรับนักประดิษฐ์ DIY ทั่วไปในการประกอบเข้าด้วยกัน
การผสมผสานระหว่าง Arduino Uno และ PWM พร้อมการเขียนโปรแกรมที่เรียบง่ายนั้นมีประโยชน์ในหลายด้าน แม้ว่าความสนใจของผมจะอยู่ที่การล่องเรือเป็นหลัก แต่การควบคุมมอเตอร์ประเภทนี้ยังสามารถนำไปใช้ได้อย่างมีประสิทธิภาพกับรถโกคาร์ทหรือสกู๊ตเตอร์ไฟฟ้า สิ่งเหล่านี้ล้วนเป็นโครงการที่สนุกและมอบประสบการณ์การเรียนรู้ที่ยอดเยี่ยม
สาร บัญ
ต่อไปนี้คือรายการเนื้อหาของบทความนี้
1. ความเป็นมาและบทนำ - ที่มาของโครงการ
2. ภาพรวมของโครงการ - การปรับเปลี่ยนและการเพิ่มเติมในคายัค
3. Pulse Width Modulation - มันคืออะไรและทำไมเราถึงต้องการมัน
4. กล่องควบคุม - Arduino Uno ที่เชื่อมต่อกับ Cytron driver เพื่อควบคุมมอเตอร์
5. การเดินสายไฟของกล่องควบคุม
6. Software - Arduino “Electric Kayak” sketch ที่ใช้ใน Uno
7. การติดตั้งส่วนประกอบ - กล่องควบคุม, อุปกรณ์บังคับเลี้ยว และ Transom
8. การทดสอบ - การใช้งานคายัคในน้ำและสรุปผล
9. การขนย้ายและการลงเรือคายัค
เพื่อให้ชีวิตง่ายขึ้นอีกนิด ผมลงทุนเงิน $200 ซื้อคายัคแบบ "sit-upon" (นั่งบน) ขนาด 10 ฟุต มาแทนที่คายัคแบบ "sit-in" (นั่งใน) ขนาด 10 ฟุตลำเดิม ด้วยอายุที่มากขึ้นของผม การเข้าและออกจากคายัคแบบ "sit-in" เป็นงานที่ค่อนข้างหนัก! ตามที่แสดงในรูปด้านล่าง ผมได้เพิ่มมือจับที่แข็งแรงหนึ่งคู่พร้อมเสากระโดงและแขนกางใบที่ทำจากไม้ เนื่องจากตัวเรือถูกสร้างมาให้มีลักษณะแบนเหมือนกระดาน ผมจึงคิดว่าจะติดตั้งใบเรือขนาดเล็กและควบคุมทิศทางด้วยพาย แต่มันไม่ได้ผล ผมจึงเพิ่ม Centerboard แบบถ่วงน้ำหนักเข้าไป แต่การเดินเรือก็ยังไม่เป็นที่น่าพอใจ ผมเลยตัดสินใจว่าการสร้าง Rudder (หางเสือ) ขนาดใหญ่ขึ้นจะเป็นขั้นตอนต่อไป
ในขณะที่ผมกำลังชั่งน้ำหนักข้อดีข้อเสียของอุปกรณ์ใบเรือแบบต่างๆ ผมได้ใช้เวลาหนึ่งวันที่ชายหาดสุดโปรดใน Hingham เมืองริมอ่าว Boston ที่มีประวัติศาสตร์ย้อนไปถึงปี 1636 ชายหาดที่นี่จะเป็นโคลนในช่วงน้ำลด ดังนั้นจึงไม่ใช่ที่ที่คนพลุกพล่าน เมืองนี้มีโรงเรียนสอนแล่นเรือใบอยู่ใกล้ๆ ซึ่งเด็กๆ เริ่มต้นเรียนด้วยเรือสคิฟฟ์ Optimist (Opti) ขนาด 8 ฟุต ใบเรือขนาด 35 ตารางฟุตและเสากระโดงสูง 7.5 ฟุตดูเหมือนจะเหมาะสมสำหรับคายัคลำใหม่ของผม
Opti ถูกออกแบบโดยชาวอเมริกันชื่อ Clark Mills ในปี 1947 เขาสร้างเรือท้องแบนที่ใหญ่ที่สุดเท่าที่จะทำได้จากไม้อัดสองแผ่น มันกลายเป็นหนึ่งในเรือใบเล็กที่ได้รับความนิยมมากที่สุดในโลก เขาได้บริจาคแบบแปลนนี้ให้กับ Optimist Club
กลับมาที่วันที่ผมไปชายหาด ขณะที่ผมเดินไปยังโรงเรียนสอนแล่นเรือใบเพื่อดูว่าเด็กๆ ติดตั้ง Opti กันอย่างไร ผมสังเกตว่าไม่มีลมเลย ผมคาดว่าจะได้เห็นกลุ่มเด็กๆ ที่ทำหน้าเศร้าสร้อย แต่ในทางตรงกันข้าม พวกเขาดูมีความสุขมาก เด็กบางคนนอนอยู่ที่ก้นเรือและใช้มือพาย บางคนใช้ช่องระบายน้ำของเรือเล่นฉีดน้ำใส่กัน และบางคนก็แค่มีความสุขที่ได้กระโดดลงน้ำจากท่าเรือทั้งๆ ที่ใส่เสื้อผ้าและรองเท้าผ้าใบ ผมอดสงสัยไม่ได้ว่าทำไมผู้ใหญ่ถึงไม่สามารถสนุกกับกิจกรรมทางน้ำได้เท่ากับที่เด็กๆ ทำ ผมคิดว่าผู้ใหญ่อาจจะทำได้ถ้าเรือราคาถูกกว่านี้ (เรือ Sunfish ใหม่ราคา $5000 ในปัจจุบัน) และถ้าเรือขนย้ายง่าย รวมถึงติดตั้งและลงน้ำได้รวดเร็ว
ระหว่างการทดสอบในน้ำของอุปกรณ์ใบเรือ Opti วันนั้นลมแรงและผมทำคายัคคว่ำไปสองครั้ง โชคดีที่ผมอยู่ไม่ไกลจากฝั่งและเรือก็กลับมาตั้งลำได้เองโดยไม่มีน้ำเข้าเรือ แต่เหตุการณ์นั้นเตือนผมว่าการพายคายัคเป็นกีฬาที่อันตราย ก่อนที่จะออกไปไกลเกินไป ควรเรียนรู้วิธีการกู้เรือและฝึกฝนการกลับขึ้นเรือ หากจำเป็นควรลงเรียนที่โรงเรียนสอนแล่นเรือใบ ณ จุดนั้นเป็นช่วงปลายฤดูกาลแล้ว ผมจึงพักไอเดียเรื่องเรือใบไว้ก่อนและเริ่มโครงการฤดูหนาวใหม่ที่ชื่อว่า "An Electric Kayak"
เช่นเดียวกับคายัคราคา $200 trolling motor ขนาดเล็กแบบ 12 volt จาก Minn-Kota และ Newport Vessels ราคาประมาณ $100 ต่อเครื่องนั้นถือว่าคุ้มค่ามาก พวกมันหนักน้อยกว่า 20 ปอนด์และให้กำลังเพียงพอที่จะทำความเร็วได้เท่ากับคนพาย แต่พวกมันไม่มีประสิทธิภาพนัก ผลการทดสอบ Dynamometer ที่ผมทำกับมอเตอร์เหล่านี้แสดงให้เห็นว่ามีประสิทธิภาพประมาณ 65% ที่กำลังสูงสุด และอย่างที่เราจะเห็น ประสิทธิภาพจะลดลงมากที่ความเร็วต่ำ การใช้แบตเตอรี่ขนาดใหญ่เท่าแบตเตอรี่รถยนต์ ประสิทธิภาพที่ต่ำอาจไม่ใช่ปัญหาใหญ่ แต่สำหรับคายัค แบตเตอรี่ที่เล็กลงและประสิทธิภาพที่ดีขึ้นคือสิ่งที่เราต้องการ โชคดีที่ความมหัศจรรย์ของ Pulse Width Modulation (PWM) โดยใช้ไมโครโปรเซสเซอร์ Arduino Uno ขนาดเล็ก (จะอธิบายภายหลัง) ช่วยให้ระบบขับเคลื่อนมีประสิทธิภาพสูงมาก

เมื่อยี่สิบปีก่อน ผมได้ทำงานเกี่ยวกับเรือไฟฟ้ามามากมายจนกลายเป็นหนังสือสองเล่ม เรือที่ประสบความสำเร็จที่สุดของผมคือ "Sunny II" ซึ่งเป็นเรือใบขนาด 19 ฟุตที่ดัดแปลงมา (ตัวเรือ O'Day Rhodes 19 พร้อมมอเตอร์ British Etek ที่มีประสิทธิภาพตามที่อธิบายไว้ในหนังสือ "My Electric Boats") เรืออยู่บนรถเทรลเลอร์เพื่อให้สามารถชาร์จแบตเตอรี่ก่อนลงน้ำได้ แม้ว่าจะใช้แรงน้อยกว่าการยกแบตเตอรี่ออกมาชาร์จ และน่าเชื่อถือกว่าการใช้ Solar Cells บนหลังคาเรือเพื่อชาร์จ แต่มันก็ยังเป็นส่วนที่น่าพึงพอใจน้อยที่สุดในประสบการณ์การใช้เรือไฟฟ้าของผม
ในช่วงหลายปีที่ผ่านมามีการพัฒนามากมายเพื่อปรับปรุงความจุและลดน้ำหนักของแบตเตอรี่โดยการใช้ Lithium-Ion แทนตะกั่วกรด การปรับปรุงเหล่านี้จะดำเนินต่อไปเนื่องจากตลาดรถยนต์ไฟฟ้าและเครื่องมือไร้สายที่เติบโตขึ้น (ปัจจุบัน Ryobi มีเครื่องมือไร้สายมากกว่า 150 ชนิด) แบตเตอรี่แพ็ก Ryobi 18-volt ขนาด 4 AH และ 6 AH หาซื้อได้ทั่วไป การใช้ PWM เพื่อสร้างความเร็วต่ำที่สุดเมื่อมอเตอร์กินไฟเพียง 35 watt สามารถวัดระยะเวลาการทำงานต่อเนื่องได้ถึง 2 ชั่วโมงจากแบตเตอรี่ 4 AH เพียงก้อนเดียว แน่นอนว่าเมื่อเพิ่มความเร็ว เวลาทำงานจะลดลง เมื่อพิจารณาจากเวลาชาร์จ 2 ชั่วโมงและความง่ายในการเสียบแบตเตอรี่ก้อนใหม่ที่ชาร์จเต็มแล้วเข้ากับกล่องควบคุม นี่จึงเป็นทางออกที่ยอดเยี่ยมสำหรับปัญหาเรื่องแบตเตอรี่
แผนของผมสำหรับโครงการ "Electric Kayak" คือการดัดแปลงคายัคขนาด 10 ฟุตสองลำ เพื่อให้สามารถขับเคลื่อนด้วยไฟฟ้าโดยใช้ trolling motor จาก Minn-Kota หรือ Newport Vessels ที่ปรับแต่งเล็กน้อย นอกเหนือจากการพาย เทคนิค PWM ที่มีอยู่ในไมโครโปรเซสเซอร์ Arduino Uno ถูกนำมาใช้เพื่อลดแรงดันไฟฟ้า 18 volt ของแบตเตอรี่แพ็กให้เหลือ 12 volt และเพื่อควบคุมความเร็วของมอเตอร์เพื่อประสิทธิภาพสูงสุด แบตเตอรี่แพ็ก Ryobi 4 AH เช่นเดียวกับที่ใช้ในเครื่องมือไร้สายถูกนำมาใช้เป็นแหล่งพลังงาน
ในการอธิบายโครงการ ผมจะใช้รูปภาพของคายัคสีแดง (คายัคแบบ "sit-in") เนื่องจากผมได้แสดงคายัคสีคอรัลแบบ "sit-upon" ในฐานะเรือใบไปแล้ว ผมได้ทำการดัดแปลงทางไฟฟ้าแบบเดียวกันกับคายัคทั้งสองลำ เหตุผลที่ทำเช่นนี้เพราะผมต้องการทราบว่ารูปทรงของตัวเรือส่งผลต่อความเร็วของเรือหรือไม่ เรือทั้งสองลำสามารถทำงานร่วมกับมอเตอร์ทั้งสองรุ่นได้ ด้วยผลการทดสอบในน้ำจากทั้งสี่รูปแบบ เราจะสามารถเข้าใจข้อดีและข้อเสียของแต่ละรูปทรงตัวเรือและมอเตอร์แต่ละตัวได้
เริ่มจากส่วนท้ายของคายัค เราจะเห็นตำแหน่งของ Mini Transom ซึ่งเราจะใช้แขวนมอเตอร์ โดยติดตั้งห่างจากปลายเรือ 2 นิ้ว ในอดีตผมเคยสร้างโครงยึดสำหรับมอเตอร์ขนาดเล็กเพื่อใช้กับเรือแคนู โครงยึดนั้นอยู่ใกล้กับที่นั่งเพื่อไม่ให้ต้องย้ายส่วนควบคุมหรือเพิ่มอุปกรณ์บังคับเลี้ยว มันใช้งานได้แต่การควบคุม (โดยเฉพาะตอนเลี้ยว) รู้สึกไม่ถนัด และผมไม่ต้องการให้เกิดผลลัพธ์ที่น่าผิดหวังแบบนั้นอีก

ในอดีต ผมเคยเห็นเรือโดรี (Dory) ขนาดใหญ่ที่ใช้โดยชาวประมงล็อบสเตอร์ ซึ่งติดตั้งกล่องไว้ในเรือและติดมอเตอร์ Outboard ไว้บนนั้น มีการใช้ส่วนควบคุมของมอเตอร์และการเลี้ยวทำผ่านตัว Outboard เลย ซึ่งสะดวกและง่ายต่อการใช้งาน เนื่องจากผมได้เจาะรูสำหรับ Centerboard ในคายัคสีคอรัลไปแล้ว ผมจึงคิดว่าหากขยายรูนั้น ผมอาจจะติดตั้ง trolling motor ไว้ตรงนั้นเพื่อให้คนพายเข้าถึงได้ง่าย แต่แนวคิดนี้ก็ไม่ได้ผลเช่นกัน สาเหตุหลักมาจากมอเตอร์ถูกติดตั้งใกล้กับตรงกลางเรือมากเกินไปสำหรับการบังคับเลี้ยวที่มีประสิทธิภาพ แต่การทดสอบในน้ำของผมก็ได้พบข่าวดีว่า แม้จะไม่มีทางลัดง่ายๆ แต่เมื่อติดตั้งมอเตอร์ที่ Transom ทั้งส่วนควบคุมและการบังคับเลี้ยวก็ทำงานได้อย่างสมบูรณ์แบบ
การบังคับเลี้ยวทำได้ด้วยคันโยกบนจุดหมุน (ดูรูปในส่วนที่ 7) ซึ่งอยู่ในระยะที่คนพายเอื้อมถึง มันจะสั่งการชุดบังคับเลี้ยวที่เพิ่มเข้าไปในมอเตอร์ดังที่แสดงไว้ด้านบน สายเชือกขนาด ¼ นิ้วถูกยึดเข้ากับปลายคันโยกบังคับเลี้ยวและวิ่งซ่อนไปตามแต่ละด้านของเรือ และโผล่ออกมาห่างจากตัวมอเตอร์สองสามฟุตเพื่อเชื่อมต่อกับแกนบังคับเลี้ยว เชือกต้องมีคุณภาพดี เรียบ และไม่ยืด ที่ด้านหน้าของเรือเชือกจะอ้อมผ่านรอกขนาดเล็ก ส่วนระยะที่เหลือจะถูกนำทางผ่าน Eye Bolts 6 ตัว
จะมีรายละเอียดเพิ่มเติมเกี่ยวกับกล่องควบคุมอีกมาก โดยทั่วไปมันต้องอยู่ในตำแหน่งที่ผู้ควบคุมเอื้อมถึง เพื่อเป็นการป้องกันน้ำเบื้องต้น มันจึงถูกติดตั้งบนฐาน (Pod) สูง 3 นิ้ว ภายในประกอบด้วยไมโครโปรเซสเซอร์ Uno และ Cytron driver สายไฟกำลังสองเส้น (ขนาดอย่างน้อย #14 gauge) วิ่งจากกล่องควบคุมไปยังมอเตอร์ที่ Transom
การเพิ่มเติมและดัดแปลงที่อธิบายไว้ข้างต้นไม่ได้ขัดขวางการใช้งานคายัคด้วยพาย แน่นอนว่าควรเก็บกล่องควบคุมให้แห้งที่สุดเท่าที่จะเป็นไปได้ วิธีแก้ง่ายๆ คือการคลุมด้วยถุงพลาสติกขนาดประมาณ 1.5 แกลลอน พร้อมสายรูดที่ด้านล่างเพื่อยึดให้แน่น รูปภาพของกล่องควบคุมและมือจับบังคับเลี้ยวแสดงและอธิบายไว้ในส่วนที่ 7
เพื่อให้ได้รับประโยชน์จากความคุ้มค่าของ trolling motor จาก Minn-Kota และ Newport Vessel เราต้องจ่ายไฟขนาด 12 volt ให้กับมัน แต่แบตเตอรี่ Lithium-Ion ของเราซึ่งมีข้อดีมากมายเหนือกว่าแบตเตอรี่ตะกั่วกรดนั้นจ่ายไฟ 18 volt การใช้ Pulse Width Modulation (PWM) จะช่วยลดแรงดันไฟ 18 volt ให้เหลือ 12 volt ได้อย่างง่ายดายและมีประสิทธิภาพ
งานสำคัญอีกอย่างหนึ่งของ PWM คือการให้ความเร็วเดินหน้า 6 ระดับ และถอยหลัง 3 ระดับ ในกรณีนี้ เทคนิค PWM จะช่วยปรับปรุงประสิทธิภาพของมอเตอร์เหล่านี้อย่างมากที่ความเร็วต่ำ
ลองมาดูว่าปกติการควบคุมความเร็วของมอเตอร์เหล่านี้ทำงานอย่างไร Resistors สองตัวถูกเชื่อมต่อกับ Switch ที่ซับซ้อน (และไม่ค่อยน่าเชื่อถือ) เพื่อให้ได้ความเร็วเดินหน้า 5 ระดับ และถอยหลัง 3 ระดับ Resistors เหล่านี้ติดตั้งอยู่ที่ด้านหน้าของมอเตอร์ในน้ำ เพื่อระบายความร้อนที่พวกมันสร้างขึ้น สำหรับความเร็วต่ำสุด Resistors ทั้งสองจะเชื่อมต่อกันแบบอนุกรมและระบายความร้อนออกมามากที่สุดเพื่อให้แรงดันแบตเตอรี่ไปยังมอเตอร์ต่ำที่สุด สมมติว่ามีไฟ 4 volt ไปยังมอเตอร์ และ 8 volt สูญเสียไปเป็นความร้อน (ประสิทธิภาพ 33%) ประสิทธิภาพ 65% ของมอเตอร์ที่ความเร็วสูงสุดก็จะลดลงเหลือไม่ถึง 25% ในทางกลับกัน PWM ทำงานที่ประสิทธิภาพ 98% เรามั่นใจในตัวเลขประสิทธิภาพนี้ได้เนื่องจาก Mosfets drivers ของ Cytron ที่มีช่องระบายอากาศซึ่งสร้างกำลังขับ PWM ไม่ได้ร้อนจนเกินไป พวกมันมอบประสิทธิภาพโดยรวมที่ดีที่สุดในทุกระดับความเร็ว
Cytron driver (ราคา $20) พิกัด 20 amp ที่ 30 volt ถูกออกแบบมาเพื่อรันมอเตอร์หุ่นยนต์ที่ความเร็วต่างๆ ทั้งเดินหน้าและถอยหลัง มันถูกออกแบบมาโดยเฉพาะเพื่อแปลสัญญาณ PWM (0 ถึง +5 volt) จากอุปกรณ์อย่าง Arduino Uno (ราคา $10) เพื่อขับเคลื่อน Permanent Magnet Motors เช่น trolling motor ในโครงการของเรา การใช้ Cytron และ Uno ทำให้เราสามารถลดแรงดันแบตเตอรี่และให้ความเร็วมอเตอร์ได้ 9 ระดับทั้งเดินหน้าและถอยหลังอย่างมีประสิทธิภาพ นี่เป็นการจับคู่ที่สมบูรณ์แบบที่สุด!
Pulse Width Modulation
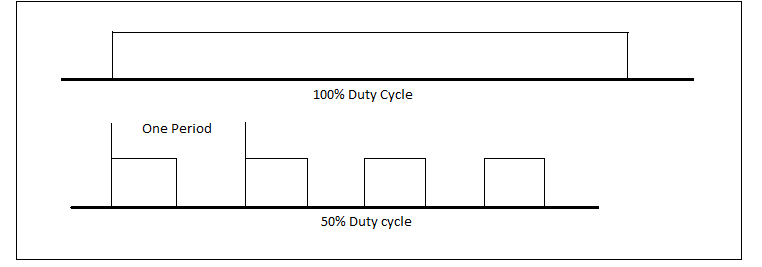
ลองมาดูกันว่าเทคนิค PWM ทำงานอย่างไร แผนภาพด้านบนแสดงวิธีการควบคุมมอเตอร์แบบ Switch ในบรรทัดบน (Duty Cycle 100%) และวิธี PWM ในบรรทัดล่าง (Duty Cycle 50%) บรรทัดบนแสดงให้เห็นว่า Switch แค่เปิดและปิดกำลังมอเตอร์ ตัวอย่างเช่น หากเชื่อมต่อแบตเตอรี่ 12 volt อนุกรมกับ Switch และมีกระแสไหล 15 amp เมื่อเปิด Switch มอเตอร์จะใช้พลังงาน 180 watt ตลอดเวลา 100%
ในบรรทัดล่าง ภายใต้การควบคุมแบบ PWM ที่ตั้งค่าไว้ที่ Duty Cycle 50% มอเตอร์จะได้รับกระแส 15 amp เพียงครึ่งหนึ่งของเวลาเพราะความกว้างของ Pulse ถูกตั้งไว้ที่ 50% มันจะใช้พลังงาน 90 watt และสร้างกำลังออกมาครึ่งหนึ่ง การใช้ Arduino Uno นั้น Duty Cycle จะถูกกำหนดด้วยตัวเลขตั้งแต่ 0 ถึง 255 ที่กำหนดโดย Software โดยตัวเลขสำหรับ Duty Cycle 50% คือ 127 (50% ของ 255)
หากมอเตอร์นี้เป็น trolling motor มันจะผลักเรือด้วยความเร็วที่ลดลง ความเร็วที่ลดลงนี้จะเทียบเท่ากับความเร็วที่ได้เมื่อคันบังคับความเร็วของมอเตอร์มาตรฐานถูกตั้งไว้ที่ระดับกลางจากความเร็วเดินหน้าห้าระดับ ณ การตั้งค่านี้ ความต้านทานที่ใส่เข้าไปในวงจรจะทำให้มอเตอร์ได้รับไฟ 6 volt แทนที่จะเป็น 12 volt
ดังที่เราได้คุยกันก่อนหน้านี้ มีความแตกต่างอย่างมากในเรื่องประสิทธิภาพระหว่างสองเทคนิคนี้: ด้วย PWM แบตเตอรี่จะจ่ายไฟ 90 watt ในขณะที่วิธีใช้ Resistor แบตเตอรี่จะจ่ายไฟประมาณ 150 watt โดย 60 watt ถูกเปลี่ยนเป็นความร้อนโดย Resistors และสูญเสียไปเปล่าๆ
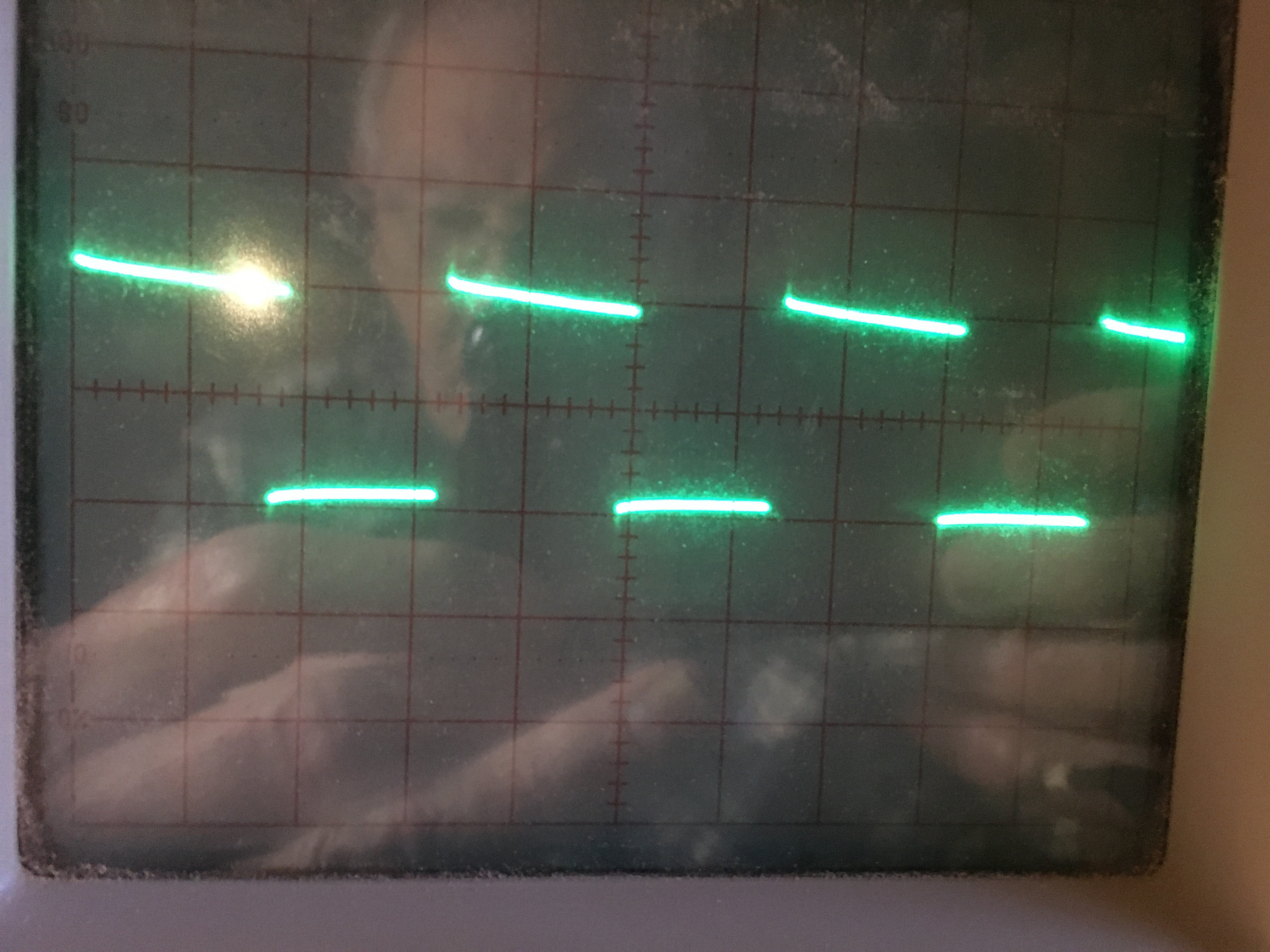

มีการเชื่อมต่อ Oscilloscope เข้ากับ Output ของ Cytron driver ซึ่งเชื่อมต่อกับหนึ่งใน trolling motor ภาพของรูปคลื่นที่ผลิตโดย Driver ภายใต้การควบคุมของ PWM แสดงไว้ด้านบน ภาพแรกแสดง Output ที่ Duty Cycle ประมาณ 50%, PWM = 120 ซึ่งสอดคล้องกับแผนภาพด้านบน ภาพที่สองแสดง Output ที่ความเร็วต่ำสุด (PWM = 60) สอดคล้องกับการตั้งค่าต่ำสุดบนคันบังคับมอเตอร์ ณ การตั้งค่าความเร็วต่ำนี้ มอเตอร์ใช้พลังงานประมาณ 45 watt ในการทดสอบในถังน้ำ
การขับเคลื่อนมอเตอร์ภายใต้การควบคุมแบบ PWM
การเดินสายมอเตอร์ด้วย Cytron driver และคอมพิวเตอร์ Arduino Uno เป็นงานที่ง่าย ใช้สายควบคุมเพียง 3 เส้นระหว่าง Uno และ Cytron โดยเส้นหนึ่งในนั้นคือสัญญาณ PWM
การโปรแกรม Uno สำหรับงานนี้ก็ง่ายพอๆ กัน เราจะลงรายละเอียดเกี่ยวกับการเขียน Sketch ในภายหลัง แต่ ณ จุดนี้ ลองพิจารณางานในการสร้างสัญญาณที่เหมาะสมสำหรับ Terminal PWM ของ Cytron driver
เราคำนวณ Duty Cycle ของคายัคไฟฟ้าดังนี้ ขั้นแรก คำนวณตัวเลข Duty Cycle ของความเร็วสูงสุด เนื่องจากแรงดันไฟฟ้าจากแบตเตอรี่ของเราสูงกว่า 18 volt เล็กน้อย ตัวเลขควรอยู่ที่ประมาณ 2/3 ของ 255 เพื่อรันมอเตอร์เทียบเท่ากับ 12 volt ในตอนนี้เราจะใช้ตัวเลข 160 เพื่อให้ได้ช่วงจากความเร็วสูงสุดไปจนถึงความเร็วต่ำสุด เราจะลดตัวเลขนี้ทีละ 20 จุดจาก 160 ไปจนถึง 60 (ค่า 160, 140, 120, 100, 80 และ 60) เพื่อให้ได้ความเร็วเดินหน้า 6 ระดับ นี่เป็นจุดเริ่มต้นที่ดีในการเลือกค่า PWM ทั้งนี้ขึ้นอยู่กับประเภทของคายัค ผลการทดสอบในน้ำ และประสิทธิภาพที่ต้องการ ความเร็วสูงสุดและความเร็วปานกลางสามารถปรับเปลี่ยนได้อย่างสมบูรณ์โดยใช้ค่า PWM ระหว่าง 0 ถึง 255
นั่นคือทั้งหมดสำหรับการสร้างสัญญาณ PWM ภาพจาก Oscilloscope ที่แสดงด้านบนให้ผลลัพธ์ตามที่คาดไว้ ตัวเลข PWM ที่ใช้สำหรับรูปบนคือ 120 และตัวเลขที่ใช้สำหรับรูปล่างคือ 60 สรุปการสนทนาเรื่อง PWM ไว้เพียงเท่านี้จนกว่าเราจะจัดการเรื่อง Software
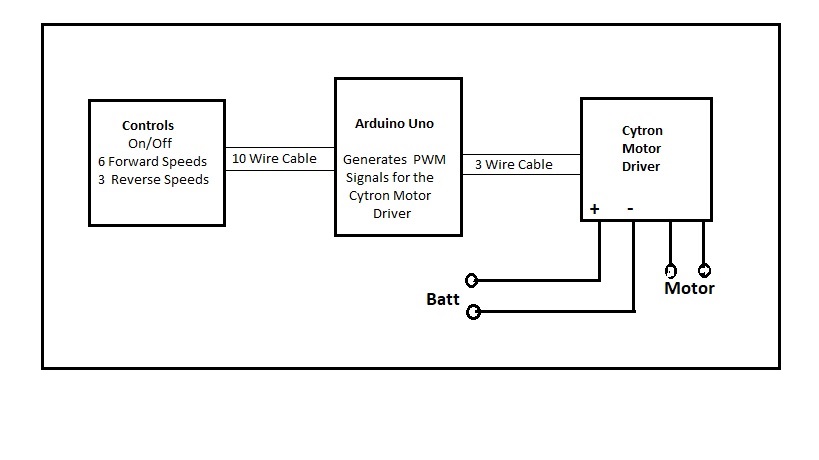
กล่องควบคุมบรรจุ Arduino Uno และ Cytron driver แต่ละตัวเป็นแผงวงจร Electronics ขนาดเล็กประมาณ 2 x 3 นิ้ว และหนาประมาณ 1 นิ้ว Block Diagram ด้านบนแสดงการเชื่อมต่อ Electronics ไปยัง Switch ควบคุมความเร็ว (สายเคเบิล 10 เส้น) และสายไฟ 3 เส้นระหว่างแผงวงจรทั้งสอง (PWM, Direction และ Ground) เส้นหนาจาก Cytron driver แสดงการเชื่อมต่อสองจุดไปยังแบตเตอรี่ (ต้องตรวจสอบขั้วให้ถูกต้อง!) และการเชื่อมต่อสองจุดไปยังมอเตอร์ (ทิศทางการหมุนจะถูกกำหนดโดยขั้วของการเชื่อมต่อ)
การเชื่อมต่อกำลังทั้งหมดใช้สายไฟแบบถักเบอร์ #14 หัวต่อเป็นหางปลาแบบแฉกสีน้ำเงินแบบย้ำ สำหรับการเชื่อมต่อมิเตอร์ ให้ใช้สายไฟแบบถักเบอร์ #22 ในจุดที่เหมาะสม (จาก Battery Output และจาก Shunt) สายไฟขนาดเล็กเหล่านี้สามารถย้ำรวมกับสายเบอร์ #14 ในหัวต่อสีน้ำเงินได้ ส่วนปลายอีกด้านของสายเบอร์ #22 ให้ใช้หัวต่อสีแดงขนาดเล็ก
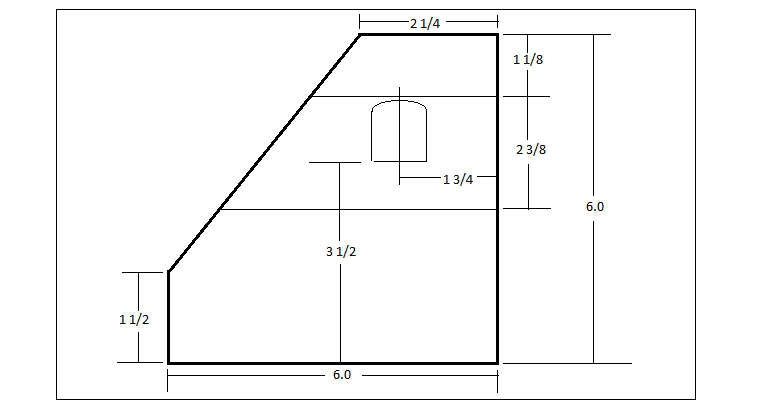
กล่องควบคุมที่สั่งทำพิเศษนี้ทำจากไม้อัดขนาด ¼ นิ้ว (ส่วนใหญ่) ทากาวติดกัน แผงด้านหลังและด้านล่างยึดด้วยสกรูเพื่อให้เข้าถึงอุปกรณ์ Electronics และสกรูยึดได้ แผนภาพด้านล่างแสดงขนาดของแผงต่างๆ
เกณฑ์การออกแบบพื้นฐานคือการทำให้กล่องแคบที่สุดเท่าที่จะเป็นไปได้เพื่อให้มีพื้นที่สำหรับขาของคนพายมากที่สุด ผมได้สร้างกล่องเหล่านี้มาสี่ใบแล้ว และบอกได้เลยว่ามันไม่สามารถทำให้แคบกว่า 5.5 นิ้วได้มากนักหากไม่จัดการบางอย่างกับตัวมิเตอร์ เช่น เราอาจเลิกใช้ Voltmeter โดยใช้ไฟแสดงสถานะ 4 ดวงที่มีอยู่ในแบตเตอรี่แพ็กแทน (โดยการเสียบแพ็กกลับหัว) หรือเราอาจใช้มิเตอร์ที่เล็กลง กล่องควบคุมก็จะแคบลงได้ประมาณหนึ่งนิ้ว
การสร้างกล่องไม้นั้นตรงไปตรงมา ยกเว้นด้านขวาที่เป็นจุดเสียบแบตเตอรี่แพ็ก เพื่อให้มีฐานที่มั่นคงสำหรับแบตเตอรี่ ผมใช้ไม้โอ๊คขนาด 6 x 6 นิ้ว หนา 1 นิ้ว (เนื้อจริง ¾ นิ้ว) สำหรับด้านขวาของกล่อง ภาพสเกตช์ด้านล่างแสดงขนาดโดยรวมของแผงด้านขวาและรายละเอียดขนาดสำหรับติดตั้งแบตเตอรี่แพ็ก ส่วนแผงด้านซ้ายที่ทำจากไม้อัด ¼ นิ้ว มีขนาดโดยรวมเท่ากัน แผงนี้เพียงแค่ต้องเจาะรูขนาด 1 นิ้ว ห่างจากขอบด้านหน้าประมาณ 1 ½ นิ้ว และห่างจากด้านล่าง 1 นิ้ว เพื่อเข้าถึง Connector USB ของ Uno
ส่วน 2 3/8 ของแผงถูกเซาะร่องลึก ¼ นิ้ว เพื่อรองรับส่วนแบนที่ยื่นออกมาของแบตเตอรี่แพ็ก ส่วนที่ตัดออกห่างจากขอบขวา 1 ¾ นิ้ว เพื่อรองรับส่วนที่ยื่นออกมาของหน้าสัมผัสแบตเตอรี่ ติดตั้ง Spring Conductor (กว้างประมาณ 3/16 นิ้ว) ไว้แต่ละด้านของส่วนที่ตัดเพื่อนำกระแสจากแบตเตอรี่ไปยัง Cytron driver แบตเตอรี่จะถูกล็อคเข้าที่ด้วยแผ่น Plexiglas ขนาด ¼ นิ้ว และ 1 1/16 นิ้ว ที่ติดตั้งอย่างระมัดระวังห่างกัน 2 ½ นิ้ว
ต้องมีร่องหลายจุดที่ตรงกับส่วนที่ยื่นออกมาของแบตเตอรี่แพ็ก ให้ใช้เครื่องมือพกพาของ Ryobi เป็นแนวทาง รูปภาพของกล่องควบคุมอาจช่วยคลี่คลายปริศนาของกลไกการล็อคได้ ส่วนนี้และการติดตั้งหน้าสัมผัสเป็นส่วนที่ยากที่สุดของการสร้างกล่องควบคุม
รายละเอียดเพิ่มเติมอีกหนึ่งอย่าง แผงด้านข้างซ้ายมีไม้เสริมขนาด ½ x ½ นิ้ว ทากาวติดไว้ที่ขอบด้านหลังและด้านล่างของแผง นี่คือจุดที่แผงด้านหลังและด้านล่างจะถูกยึดด้วยสกรูเบอร์ #6 ขนาด ¾ นิ้ว
แผงอีก 5 แผงจะวางทับแผงด้านข้างในทุกกรณี ดังนั้นพวกมันจะยาวหรือกว้างกว่าการวัดของแผงด้านข้างที่พวกมันไปติดตั้งอยู่ประมาณ ¼ ถึง ½ นิ้ว ขนาดของแผงจะมีให้ แต่เนื่องจากพวกมันเป็นเพียงไม้อัดทรงสี่เหลี่ยมผืนผ้าธรรมดา จึงมีรูปวาดเฉพาะแผงด้านหน้าเท่านั้น
แผงด้านบน: 2 ¾ นิ้ว x กว้าง 5 ½ นิ้ว
แผงด้านหน้า: 6 นิ้ว (ตัดแต่งตามความจำเป็นเพื่อให้พอดี) x กว้าง 5 ½ นิ้ว
แผงด้านหน้าส่วนล่าง: 1 ¾ x กว้าง 5 ½ นิ้ว
แผงด้านหลัง: 6 ¼ นิ้ว x กว้าง 5 ½ นิ้ว
แผงด้านล่าง: 5 ½ x กว้าง 5 ½ นิ้ว
มุมที่ติดตั้งแผงด้านหน้าหมายความว่ามุมฉาก 90 องศาระหว่างด้านหน้าและด้านบนต้องถูกแบ่งออกเป็น 4 ทาง มุมโดยประมาณมีดังนี้: มุมระหว่างแผงด้านบนและแผงด้านหน้าคือประมาณ 55 องศา (28 องศาสำหรับขอบของแต่ละแผง) มุมระหว่างแผงด้านล่างและแผงด้านหน้าคือประมาณ 35 องศา (17 องศาสำหรับขอบของแต่ละแผงเหล่านี้)
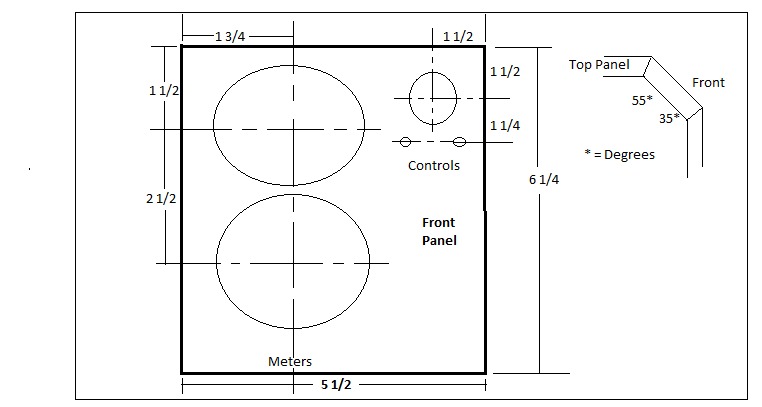
ภาพสเกตช์ของแผงด้านหน้าแสดงอยู่ด้านบน แสดงตำแหน่งที่แนะนำของส่วนประกอบและส่วนควบคุม มุมมองด้านข้างของแผงด้านหน้าทั้ง 3 แผงยังแสดงมุมที่กล่าวถึงข้างต้น ส่วนประกอบของกล่องควบคุมประกอบด้วย: Ammeter ขนาด 20 amp พร้อม Shunt ที่ติดตั้งไว้ใต้แผงด้านบน และ Voltmeter ขนาด 30 volt Switch ควบคุมความเร็วที่ให้ความเร็วเดินหน้า 6 ระดับ และถอยหลัง 3 ระดับ พร้อม Switch เปิด/ปิด และไฟแสดงสถานะก็ติดตั้งอยู่บนแผงนี้ด้วย (มิเตอร์หาซื้อได้ที่ Amazon ในราคารวมประมาณ $20)
แผงวงจรทั้งสอง (Cytron และ Uno) ติดตั้งอยู่บนแผงด้านล่างใต้มิเตอร์ให้เยื้องไปด้านหน้ามากที่สุด โดย Uno จะอยู่ใกล้ด้านซ้ายที่สุดซึ่งเป็นตำแหน่งของรูเข้าถึงสาย USB ขนาด 1 นิ้ว
การเดินสายไฟของกล่องควบคุมแสดงไว้ในสองแผนภาพ แผนภาพแรกแสดงการเดินสายกำลัง คือการเดินสายจากแบตเตอรี่แพ็กไปยังแผงวงจร Cytron driver และไปยังมอเตอร์ แผนภาพที่สอง (การเดินสาย Electronics) แสดงวิธีที่ส่วนควบคุมเชื่อมต่อกับไมโครโปรเซสเซอร์ Arduino Uno และ Cytron driver แผนภาพการเดินสายทั้งสองนี้พื้นฐานมากและทำตามได้ง่าย
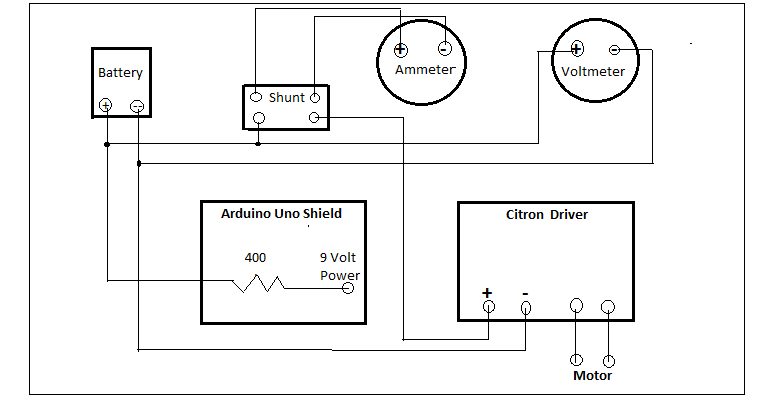
เริ่มที่ขั้ว + ของแบตเตอรี่แพ็ก แผนภาพการเดินสายแสดงการเชื่อมต่อ 3 จุดไปยังขั้วนี้: a) Resistor ขนาด 400 ohm, ½ watt, b) Ammeter shunt และ c) ขั้ว + ของ Voltmeter การเชื่อมต่อ Resistor ในข้อ a) ทำบนแผง Shield ที่เสียบอยู่บน Arduino Uno วัตถุประสงค์คือเพื่อจ่ายไฟให้กับ Uno ซึ่งจำลองการใช้แบตเตอรี่ 9 volt ตัว Resistor ใช้เพื่อลดแรงดันแบตเตอรี่ 18 volt ให้เหลือไม่เกิน 12 volt เพื่อให้เป็นไปตามข้อมูลจำเพาะของ Uno โดยบัดกรีเข้ากับขั้ว + ของหัวต่อแบตเตอรี่ 9 volt
การเชื่อมต่อในข้อ b) ทำที่ด้านหนึ่งของอุปกรณ์ Shunt ที่มาพร้อมกับ Ammeter ตัว Shunt เป็นเพียง Resistor ที่ผ่านการคาลิเบรตซึ่งจับคู่กับกลไกของ Ammeter (ซึ่งจริงๆ แล้วคือ Voltmeter ขนาด 75 millivolt) ส่วนอีกด้านของ Shunt เชื่อมต่อกับขั้ว + ของ Cytron driver เนื่องจาก Cytron driver ไม่มีการป้องกันการต่อสลับขั้ว จึงเป็นเรื่องสำคัญมากที่ต้องตรวจสอบขั้วของแหล่งจ่ายไฟ โปรดทราบว่าไม่มีเครื่องหมายขั้วสำหรับมอเตอร์ เหตุผลคือมอเตอร์จะเพียงแค่หมุนในทิศทางตรงกันข้ามเมื่อสลับสาย สายไฟสองเส้น (เบอร์ 22 gauge) เดินจาก Shunt ไปยัง Ammeter
การเชื่อมต่อในข้อ c) เดินจาก Battery + ไปยังขั้ว + ของ Voltmeter สายเบอร์ 22 อีกเส้นเดินจากขั้วลบของแบตเตอรี่ไปยังขั้วลบของ Voltmeter เราได้กล่าวไปแล้วว่าสายเบอร์ 22 สามารถย้ำรวมกับสายเบอร์ 14 ในขั้วต่อสีน้ำเงินได้ ในสามจุดสุดท้าย จุดหนึ่งเดินจาก Battery – ไปยัง Cytron – และสองจุดสุดท้ายเดินจากแผง Cytron ไปยัง trolling motor
คำแนะนำเหล่านี้ใช้ได้กับ trolling motor ทั้งสองรุ่น:
ถอดสกรู 6 ตัวที่ยึดฝาครอบออก สังเกตว่ามีสายไฟ 4 เส้นลงไปตามแกนไปยังมอเตอร์: สายไฟขนาดใหญ่ 2 เส้น สีแดง (+) และสีดำ (ไปที่ขั้วมอเตอร์) และสายไฟขนาดเล็ก 2 เส้น สีขาวและสีเหลือง (ไปที่ Resistors) ตัว Switch ควบคุมความเร็วสีดำและ Resistors ไม่จำเป็นต้องใช้เมื่อใช้การควบคุมแบบ PWM และจะถูก By-pass ดังนี้ - ตัดสายสีแดงและสีดำห่างจาก Switch ควบคุมประมาณ 2 นิ้ว ใช้ Butt Connector เพิ่มสายไฟเข้าไปประมาณ 18 นิ้ว (สามารถใช้สายแบตเตอรี่เพื่อการนี้ได้) เชื่อมกับสายสีแดงและสีดำจากมอเตอร์ คุณต้องมีสายยาวพอที่จะไปถึงขั้วต่อบน mini-transom ส่วนสายสีขาวและสีเหลืองสามารถปล่อยทิ้งไว้ตามเดิมได้ ด้วย Butt Connector 4 ตัว (2 ตัวสำหรับสายมอเตอร์ และ 2 ตัวสำหรับสายแบตเตอรี่) การเดินสายจะสามารถกลับสู่รูปแบบเดิมได้
แผนภาพ Electronics
เราพูดถึงคำว่า “Shield” ในแผนภาพด้านบน คอมพิวเตอร์ Arduino หลายรุ่นเช่น Uno สามารถใส่ Shield ซึ่งเสียบเข้ากับบอร์ดโปรเซสเซอร์พร้อมวงจรที่สร้างมาสำเร็จรูปสำหรับวัตถุประสงค์พิเศษ เช่น การเชื่อมต่ออินเทอร์เน็ต นอกจากนี้ยังสามารถซื้อ Prototype Shield ($3) มาเพื่อสร้างวงจรปรับแต่งเองได้ มันดูเหมือน Breadboard เปล่าๆ ที่มี Connector ไม่กี่ตัวและมักจะมี Reset switch เราใช้ Prototype Shield ตัวนี้เพื่อติดตั้ง Resistors ที่เราต้องการได้อย่างสะดวก
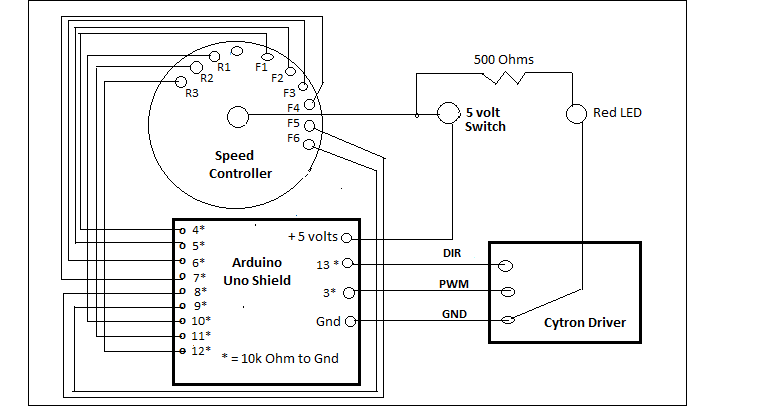
การเชื่อมต่อ Electronics ในกล่องควบคุมแสดงการเชื่อมต่อระหว่าง Speed controller, Switch เปิด/ปิด 5 volt, Uno shield และ Cytron driver
Speed controller เป็น Rotary switch แบบ 12 ตำแหน่ง ตำแหน่งตรงกลางคือ “Off” เมื่อหมุนตามเข็มนาฬิกา จะเลือกความเร็ว F1 ถึง F6 ทีละตำแหน่ง F1 คือความเร็วเดินหน้าช้าที่สุด และ F6 คือความเร็วเดินหน้าเต็มที่ เมื่อเลือกความเร็ว ไฟ 5 volt จากตำแหน่งกลางจะเชื่อมต่อกับ Pin ที่เลือก เมื่อหมุนทวนเข็มนาฬิกา จะเลือกความเร็วถอยหลัง R1 ถึง R3 ทีละตำแหน่ง หาก Rotary switch มีตัวหยุด (Stop) ให้เลือกตำแหน่ง “Off” อย่างระมัดระวังเพื่อให้แน่ใจว่าตัวหยุดจะไม่รบกวนลำดับความเร็วเดินหน้า 6 ระดับ หรือถอยหลัง 3 ระดับ
หากคุณสามารถหาสายไฟแบบถักขนาดเบอร์ #26 (หรือใกล้เคียง) ที่มีโค้ดสี 9 เส้นได้จะดีมาก ถ้าไม่มี ให้ทำสายเคเบิล 3 เส้นจำนวนสามชุด โดยระบุแต่ละปลายไว้ ตามที่แสดงในแผนภาพ Pin F1, F2 และ F3 ไปยัง Port 4*, 5* และ 6* Pin F4, F5 และ F6 ไปยัง Port 7*, 8* และ 9* ส่วน Pin ถอยหลัง R1, R2 และ R3 ไปยัง Port 10*, 11* และ 12*
เครื่องหมายดอกจันระบุว่ามี Resistor ขนาด 10,000 ohm, ¼ watt เชื่อมต่อกับแต่ละ Port ทั้ง 11 Port การเชื่อมต่อลง Ground นี้จำเป็นเพื่อไม่ให้ Port ของ Uno มีสถานะ “ลอย” (Float) ซึ่งเป็นสภาวะที่ไม่เสถียร ไม่เป็นทั้ง 1 หรือ 0 Shield แต่ละรุ่นไม่เหมือนกัน แต่ตัวที่ผมซื้อมามีแถบ Ground (และแถบ +5v) ซึ่งสามารถบัดกรีปลายข้างหนึ่งของ Resistors ทั้ง 11 ตัวลงไปได้ ผมค่อยๆ เลื่อน Housing พลาสติกจาก Connector ของ Shield ออกเพื่อเผยให้เห็น Pin ภายใน จากนั้นจึงบัดกรีปลาย Resistor เข้าไปอย่างระมัดระวัง แล้วจึงบัดกรีสายไฟจาก Speed controller เข้ากับ Resistor นั้น
สายเคเบิล 3 เส้นอีกชุดจำเป็นสำหรับการเชื่อมต่อระหว่าง Cytron driver และ Port 3*, 13* และ Gnd สายไฟแบบถักเบอร์ใดก็ได้ระหว่าง #23 ถึง #26 สามารถใช้งานได้ สำหรับการเชื่อมต่อที่แผง Cytron ซึ่งใช้ขั้วต่อแบบสกรู ให้ไล้ตะกั่วที่ปลายสายเพื่อไม่ให้สายแตกเมื่อขันสกรูให้แน่น
การเดินสาย Electronics ส่วนสุดท้ายคือการเชื่อมต่อ 5 volt ไปยัง Switch เปิด/ปิด และไฟ LED แสดงสถานะ ใช้สายไฟแบบถักแบบเดียวกับที่ใช้ข้างต้นได้เลย โดย +5v เดินจาก Uno shield ไปยังด้านหนึ่งของ Switch ส่วนอีกด้านของ Switch เดินไปยัง Common ของ Speed controller และไปยัง Resistor จำกัดกระแสของ LED ขนาด 500 ohm อีกด้านของ Resistor เดินไปยังด้าน + ของ LED (ต้องตรวจสอบขั้วของ LED) และขาอีกข้างของ LED ต่อลง Gnd
นี่คือการสรุปการเดินสายกำลังและการเดินสาย Electronics ของกล่องควบคุม
Arduino Uno ถูกเลือกมาเพื่อควบคุม Cytron driver เพราะมีขนาดเล็กแต่ทรงพลังเพียงพอที่จะทำงานตามที่ต้องการ ข้อกำหนดหลักคือต้องมี Port หรือ Channel เพียงพอสำหรับความเร็วเดินหน้า 6 ระดับ และถอยหลัง 3 ระดับ นอกจากนี้ยังต้องสามารถสร้างสัญญาณ PWM เพื่อลดแรงดันแบตเตอรี่ 18 volt ให้เหลือ 12 volt ได้
โปรแกรมที่สามารถทำงานนี้ได้ (เรียกว่า “Sketch” ในภาษา Arduino) ถูกเขียนขึ้นบน PC และ Upload ไปยังบอร์ด Uno ผ่าน USB ของ PC ก่อนจะ Upload Sketch จะมีการตรวจสอบและ Compile โดย Compiler ที่มาในตัว Sketch ของ “Electric Kayak” ถูกเขียนไว้ให้คุณแล้ว ดังนั้นมันเป็นเพียงเรื่องของการพิมพ์ Code สองสามหน้าลงใน PC ของคุณ
ในการเขียนและ Upload Sketch จาก PC ไปยัง Uno คุณต้องติดตั้ง Software Arduino IDE (Integrated Development Environment) ลงใน PC ของคุณก่อน ซึ่งมีคุณสมบัติมากมาย เช่น ห้องสมุดของ Sketches, Editor (คล้ายกับ Editor ของ Open Office) สำหรับพิมพ์ Sketch ใหม่, Compiler ที่ใช้ตรวจสอบ Sketch และ Software ที่จำเป็นสำหรับ Upload Sketch ไปยังบอร์ดคอมพิวเตอร์อย่าง Uno หากต้องการดาวน์โหลด IDE เวอร์ชันล่าสุด ให้ไปที่ไซต์ Arduino.com โดย IDE เป็นโปรแกรมแบบ “Open Source” ที่ฟรีทั้งหมด
คุณต้องทำตามคำแนะนำการติดตั้งและเลือก USB Drivers คุณต้องระบุชื่อบอร์ดของคุณ (Uno) และหมายเลข COM ของ Port (มักจะเป็น 3) เมื่อถึงจุดนี้ให้เลือก Sketch เช่น “Blink” จากห้องสมุด Arduino (File/Examples/Basics/Blink) และตรวจสอบให้แน่ใจว่าคุณสามารถ Upload และสั่งงานได้
ตอนนี้คุณพร้อมที่จะคัดลอก Sketch “Electric Kayak” และ Upload ไปยัง Uno ซึ่งจะสั่งงาน trolling motor โดยใช้ Cytron driver เมื่อโหลด Sketch เข้าไปใน Uno แล้ว มันสามารถใช้งานซ้ำได้เรื่อยๆ การตัดไฟจากบอร์ด Uno จะไม่ส่งผลกระทบต่อโปรแกรมที่เก็บไว้
หากนี่เป็นครั้งแรกที่คุณจ่ายไฟให้บอร์ด Uno ด้วยสาย USB คุณจะเห็น LED กระพริบบนบอร์ดทันที นี่บอกให้คุณรู้ว่าบอร์ดถูกส่งมาพร้อมกับ Sketch ที่โหลดไว้อยู่แล้ว LED ที่กระพริบคือสัญลักษณ์ดั้งเดิม “Hello World” ที่ใช้แนะนำโปรแกรมใหม่
ทดสอบการติดตั้งตามที่อธิบายข้างต้นโดย Upload Sketch “Blink” ลงในบอร์ด การฝึกสั้นๆ ที่ดี ณ จุดนี้คือการลองแก้ไข Delay (ใน “Blink”) จาก 1000 (1 วินาที) เป็น 200 (1/5 วินาที) หลังจาก Upload รุ่นที่แก้ไขแล้ว คุณจะเห็น LED กระพริบเร็วมาก การฝึกนี้แสดงให้เห็นว่าการเปลี่ยน Parameter ใน Sketch นั้นง่ายเพียงใด
งานต่อไปคือการคัดลอก Sketch ที่แสดงด้านล่างลงในรายการโปรแกรมของ Arduino IDE ขั้นตอนมีดังนี้
เปิด IDE
ภายใต้ “New” คุณจะพบโครงสร้าง Sketch เปล่าๆ ซึ่งแสดงส่วนสำคัญสองส่วนของ Sketch คือ: “setup” (ซึ่งทำงานเพียงครั้งเดียว) และ “loop” (ซึ่งทำงานซ้ำไปซ้ำมา) เมื่อมีตัวเลข (Integers) ใน Sketch พวกมันจะต้องถูกนิยามก่อนส่วน setup
ใน Sketch “Electric Kayak” เราจะมีตัวเลข (Integers) ที่สอดคล้องกับ Port ต่างๆ พวกมันถูกนิยามดังตัวอย่าง: “int KAYAK_PWM= 3;” หมายความว่า Port 3 จะสร้าง PWM Outputs
ในส่วน setup เราจะระบุด้วยว่า Port นั้นถูกใช้เป็น Input หรือ Output เช่น: “pinMode(3, OUTPUT);”
ในส่วน loop ตัวอย่างแสดงให้เห็นว่าเราจะขับเคลื่อนมอเตอร์ตามความเร็วและทิศทางการหมุนที่เลือก: “analogWrite(KAYAK_PMW, 100*val);”
โครงสร้าง Sketch พื้นฐานแสดงไว้ด้านล่าง:
void setup() {
// put your setup code here, to run once:
}
void loop() {
// put your main code here, to run repeatedly:
}
โปรดทราบว่าเครื่องหมายวรรคตอน, ตัวอักษรพิมพ์ใหญ่, ช่องว่าง, การขีดเส้นใต้ และวงเล็บ ทั้งหมดต้องเป็นไปตามกฎของ C++ ข้อผิดพลาดใดๆ จะถูกตรวจพบโดย Compiler และการทำงานจะหยุดลงจนกว่าข้อผิดพลาดจะได้รับการแก้ไข มันง่ายมากที่จะใส่เครื่องหมายวรรคตอนผิดหรือลืมใส่ จงพิมพ์ Sketch อย่างระมัดระวัง! ใช้ฟังก์ชันการแก้ไข “Copy” และ “Paste” ให้มากที่สุดเพื่อคัดลอก Code ที่ผ่านการตรวจสอบจาก Compiler แล้ว
Sketch ของ Electric Kayak มีดังนี้ เครื่องหมาย Double Slash (//) บอกให้ Compiler ข้ามข้อมูลอธิบายที่เหลือในบรรทัดนั้น (ยังมีประโยชน์หากคุณต้องการตรวจสอบหาจุดผิดพลาดที่ Compiler ตรวจพบ)
// put your setup code here, to run once:
int KAYAK_PWM = 3;
int KAYAK_F1 = 4;
int KAYAK_F2 = 5;
int KAYAK_F3 = 6;
int KAYAK_F4 = 7;
int KAYAK_F5 = 8;
int KAYAK_F6 = 9;
int KAYAK_R1 = 10;
int KAYAK_R2 = 11;
int KAYAK_R3 = 12;
int KAYAK_DIR = 13;
int val = 0;
void setup ()
{
pinMode(3, OUTPUT);
pinMode(4, INPUT);
pinMode(5, INPUT);
pinMode(6, INPUT);
pinMode(7, INPUT);
pinMode(8, INPUT);
pinMode(9, INPUT);
pinMode(10, INPUT);
pinMode(11, INPUT);
pinMode(12, INPUT);
pinMode(13, OUTPUT);
}
void loop() {
// put your main code here, to run repeatedly:
val=digitalRead(KAYAK_F1);
if (val == 1) {
digitalWrite(KAYAK_DIR, val);
analogWrite(KAYAK_PWM, 60*val);
delay (1000);
digitalWrite(KAYAK_DIR, LOW);
digitalWrite(KAYAK_PWM, LOW);}
val=digitalRead(KAYAK_F2);
if (val == 1) {
digitalWrite(KAYAK_DIR, val);
analogWrite(KAYAK_PWM, 80*val);
delay (1000);
digitalWrite(KAYAK_DIR, LOW);
digitalWrite(KAYAK_PWM, LOW);}
val=digitalRead(KAYAK_F3);
if (val == 1) {
digitalWrite(KAYAK_DIR, val);
analogWrite(KAYAK_PWM, 100*val);
delay (1000);
digitalWrite(KAYAK_DIR, LOW);
digitalWrite(KAYAK_PWM, LOW);}
val=digitalRead(KAYAK_F4);
if (val == 1) {
digitalWrite(KAYAK_DIR, val);
analogWrite(KAYAK_PWM, 120*val);
delay (1000);
digitalWrite(KAYAK_DIR, LOW);
digitalWrite(KAYAK_PWM, LOW);}
val=digitalRead(KAYAK_F5);
if (val == 1) {
digitalWrite(KAYAK_DIR, val);
analogWrite(KAYAK_PWM, 140*val);
delay (1000);
digitalWrite(KAYAK_DIR, LOW);
digitalWrite(KAYAK_PWM, LOW);}
val=digitalRead(KAYAK_F6);
if (val == 1) {
digitalWrite(KAYAK_DIR, val);
analogWrite(KAYAK_PWM, 160*val);
delay (1000);
digitalWrite(KAYAK_DIR, LOW);
digitalWrite(KAYAK_PWM, LOW);}
val=digitalRead(KAYAK_R1);
if (val == 1) {
digitalWrite(KAYAK_DIR, LOW);
analogWrite(KAYAK_PWM, 60*val);
delay (1000);
digitalWrite(KAYAK_DIR, LOW);
digitalWrite(KAYAK_PWM, LOW);}
val=digitalRead(KAYAK_R2);
if (val == 1) {
digitalWrite(KAYAK_DIR, LOW);
analogWrite(KAYAK_PWM, 80*val);
delay (1000);
digitalWrite(KAYAK_DIR, LOW);
digitalWrite(KAYAK_PWM, LOW);}
val=digitalRead(KAYAK_R3);
if (val == 1) {
digitalWrite(KAYAK_DIR, LOW);
analogWrite(KAYAK_PWM, 120*val);
delay (1000);
digitalWrite(KAYAK_DIR, LOW);
digitalWrite(KAYAK_PWM, LOW);}
//delay (2000);
}
หลังจากพิมพ์ Sketch และตรวจสอบว่า Compile ผ่านแล้ว ให้บันทึกด้วยคำสั่ง “Save as” (ภายใต้ “File”) ด้วยชื่อไฟล์ที่คุณต้องการ วิธีที่ง่ายที่สุดในการเรียก Sketch กลับมาคือการใช้ลูกศรขึ้นที่อยู่ด้านบนของ Sketch ทุกใบ
Code ในส่วน setup แสดงว่าเรามี Output Ports 2 ช่อง (Port 3 และ 13) Port 3 เป็น Port แบบ PWM ใช้สำหรับส่งสัญญาณ PWM ไปยัง Cytron driver ส่วน Port 13 ใช้สำหรับส่งสัญญาณทิศทางมอเตอร์ไปยัง Cytron driver มีความเร็วเดินหน้า 6 ระดับ และความเร็วถอยหลัง 3 ระดับ Port 4 ถึง 9 สำหรับความเร็วเดินหน้า ส่วน Port 10, 11 และ 12 สำหรับความเร็วถอยหลัง ค่า “val” จะมีค่า Binary เป็น 1 หรือ 0 โดยมันจะเป็น 1 เมื่อมีการเลือก Routine ความเร็วส่วนนั้นๆ ผ่าน Rotary speed control switch
ส่วน loop ประกอบด้วย Routine ความเร็วที่คล้ายคลึงกัน 9 ชุด สำหรับความเร็วเดินหน้า 6 และถอยหลัง 3 แต่ละความเร็วจะมีตัวเลข PWM และทิศทางการหมุนของตัวเองตามการตั้งค่าของ Switch ควบคุมความเร็ว ตัวอย่างเช่น เมื่อบิด Switch ตามเข็มนาฬิกาไปหนึ่งตำแหน่ง (จากตำแหน่ง Center/Off) มอเตอร์จะทำงานที่ความเร็วช้าที่สุด (ตัวเลข PWM 60) ในทิศทางเดินหน้า (F1) ตำแหน่งถัดไปตามเข็มนาฬิกาจะทำให้ Routine ที่สองทำงาน และเพิ่มความเร็วเป็น PWM 80 ในทิศทางเดินหน้า 4 ตำแหน่งถัดไปจะให้ผลแบบเดียวกันในทิศทางเดินหน้า ตำแหน่งสุดท้ายจะรันมอเตอร์ที่ความเร็วสูงสุดด้วย PWM 160 ในการเปิดใช้งาน Routine ถอยหลัง 3 ระดับ ให้บิด Switch กลับมาที่ Center/Off แล้วบิดทวนเข็มนาฬิกา แต่ละขั้นตอนจะเพิ่มความเร็วถอยหลังในลักษณะเดียวกับความเร็วเดินหน้า โดย Routine ถอยหลังคือ Routine ที่ 7, 8 และ 9
เมื่อดู Code 7 บรรทัดในแต่ละ Routine ขั้นแรกเราจะระบุว่า Routine ใดกำลังทำงาน (ถ้ามี) Routine ความเร็วแรกคือความเร็ว F1 (Forward 1) บรรทัดแรกของ Code จะระบุค่าของ “val” มันอาจเป็น 1 หรือ 0 และจะเป็น 1 ก็ต่อเมื่อมีการเลือกตำแหน่ง Switch นั้นๆ ตำแหน่ง Center/Off จะคืนค่าเป็น 0 เช่นเดียวกับความเร็วอื่นๆ เนื่องจากสามารถเลือกความเร็วได้เพียงระดับเดียวในเวลาเดียวกัน
หาก val เป็น 0 เราจะไปที่ Routine ความเร็วถัดไป แต่หากเป็น 1 ซึ่งหมายความว่าตำแหน่ง Switch นี้มีไฟ +5 volt เราจะเริ่มทำงาน Code 5 บรรทัดถัดไปตามหลังเครื่องหมายปีกกาเปิด (“{“) จนถึงเครื่องหมายปีกกาปิด (“}”)
บรรทัดแรกของ Code เหล่านี้คือ “digitalWrite(KAYAK_DIR, val)” หมายความว่าเราจะเปิดใช้งาน Port 13 ด้วยไฟ +5 volt เพื่อให้มอเตอร์หมุนเดินหน้า
บรรทัดที่สองคือ “analogWrite(KAYAK_PWM, 60* val)” หมายความว่าเราจะเปิดใช้งาน Port 3 (PWM Port) ด้วยสัญญาณที่ทำให้เกิด Pulse ระยะเวลา 60/255 สร้างขึ้นโดย Cytron driver
บรรทัดที่สามหมายความว่าเราหยุดพัก 1 วินาทีภายใต้สภาวะการทำงานนี้
บรรทัดที่สี่ “digitalWrite(KAYAK_DIR, LOW)” จะปิด Port 13 และบรรทัดที่ห้า “digitalWrite(KAYAK_PWM, LOW)” จะปิด Port 3
ตอนนี้เราเคลื่อนไปที่ Routine ความเร็วถัดไปใน loop สถานการณ์ที่เป็นไปได้มากที่สุดคือไม่มีการเลื่อน Switch ดังนั้นหลังจากตรวจสอบความเร็วอื่นๆ ทั้ง 8 ระดับแล้ว เราจะพบ val = 1 อีกครั้งใน Routine ความเร็วแรก สถานการณ์นั้นจะทำให้มอเตอร์ทำงานต่อไปอีกหนึ่งวินาทีก่อนจะวนกลับมาตรวจสอบว่าตำแหน่ง Switch เปลี่ยนไปหรือไม่ กระบวนการนี้อาจดำเนินไปได้นานหลายชั่วโมง ไม่มีการสูญเสียพลังงานในมอเตอร์อย่างมีนัยสำคัญเพราะ Uno ทำงานเร็วมาก การวนรอบ loop หนึ่งครั้ง (เพื่อตรวจสอบ Routine ความเร็วอื่นๆ อีก 8 ชุด) ใช้เวลาน้อยกว่า 50 microseconds ซึ่งเป็นช่วงเวลาที่สั้นเกินกว่ามอเตอร์จะสังเกตเห็น
ในที่สุด เมื่อมีการเปลี่ยนความเร็วหรือบิด Switch กลับมาที่ตำแหน่ง Center/Off ในกรณีนั้น val จะไม่เป็น “1” ใน Routine ความเร็วใดๆ และมอเตอร์จะหยุดทำงาน ณ จุดนี้ สามารถปิดไฟที่จ่ายให้ Electronics และถอดแบตเตอรี่แพ็กออกจากกล่องควบคุมได้
ในส่วนที่น่าสนใจนี้ เราได้เห็นว่าสมอง (คอมพิวเตอร์ Uno) ควบคุมกล้ามเนื้อของแบตเตอรี่แพ็กโดยใช้ Cytron driver เพื่อสั่งงาน trolling motor ที่ความเร็วต่างๆ ทั้งเดินหน้าและถอยหลังได้อย่างไร Electric Kayak sketch คือโปรแกรมที่ควบคุมการทำงานของสมอง ขั้นแรกเราตั้งค่า Input และ Output Ports ทั้ง 11 พอร์ตที่จำเป็น จากนั้นใช้ “Speed Routines” ที่คล้ายกัน 9 ชุด เราจะกระตุ้น trolling motor ตามความเร็วที่เลือกผ่าน Switch ควบคุมความเร็ว ในขณะเดียวกัน แรงดันแบตเตอรี่แพ็กจะถูกลดจาก 18 volt เหลือ 12 volt เพื่อให้ตรงกับแรงดันไฟฟ้าที่ใช้งานของ trolling motor
เราได้เห็นว่า Electric Kayak คือคายัคมาตรฐาน 10 ฟุตที่มีส่วนเพิ่มเติมหลักๆ 3 ส่วน ได้แก่: Mini-transom สำหรับติดตั้ง trolling motor, กลไกการบังคับเลี้ยว และกล่องควบคุมซึ่งทำหน้าที่สั่งงานมอเตอร์ที่ความเร็วต่างๆ ในสองทิศทางและเป็นที่เก็บแบตเตอรี่แพ็ก ในส่วนนี้ เราจะอธิบายส่วนเพิ่มเติมเหล่านี้ด้วยรูปภาพและแสดงวิธีติดตั้งในคายัค
รูปภาพด้านล่างแสดงกล่องควบคุมพร้อม Ammeter, Voltmeter และ Speed controller ทางด้านขวาสามารถเสียบแบตเตอรี่แพ็ก Ryobi 4 หรือ 6 Ampere Hour เข้าไปได้ ทางด้านซ้ายมีรูขนาด 1 นิ้วสำหรับเชื่อมต่อสาย USB จาก PC เข้ากับกล่องควบคุม ส่วนที่ฝาครอบด้านหลังกล่องมี Terminal 2 จุดสำหรับต่อสายไฟไปยังมอเตอร์

กล่องควบคุมติดตั้งบนฐาน (Pod) สูง 3 นิ้ว เพื่อป้องกันไม่ให้เปียกน้ำซึ่งมักจะพบอยู่ที่ก้นเรือคายัค ด้านล่างของฐานถูกปาดให้โค้งมนตามลักษณะท้องเรือคายัค มันถูกยึดเข้ากับก้นเรือห่างจากด้านหน้าของที่นั่งประมาณ 12 นิ้ว ด้วยสกรู Stainless steel หัวเรียบขนาด ¼ นิ้ว ยาว 1 ¼ นิ้ว จำนวนสองตัว กล่องควบคุมยึดติดกับฐานด้วยสกรูทองเหลือง (หรือ Stainless steel) ขนาด 3/16 นิ้ว ยาว 1 ½ นิ้ว เกลียว 32
ผมทำฐานขึ้นจากไม้ 2 x 4 สองชิ้นทากาวติดกัน วัดขนาดได้ประมาณ 3 x 3 นิ้ว สกรูขนาด 3/16 นิ้วจะเจาะผ่านส่วนบน 1 ½ นิ้วของฐาน พวกมันถูกเจาะฝังลึก ¾ นิ้วเพื่อให้โผล่ออกมา ¾ นิ้ว ตรงกับรูในกล่องควบคุมซึ่งอยู่ใกล้กับแผง Cytron ให้ไม่อยู่ข้างหน้าจนเกินไป เพื่อให้สามารถขันน็อตตัวเมีย (Lock nuts) ได้ด้วยประแจแหวนเมื่อถอดฝาหลังออก
กลไกการบังคับเลี้ยวเป็นเพียงแขนคันโยกบนจุดหมุนใกล้กับส่วนกลางของคายัค ที่ด้านล่างของแขนคันโยกมีเชือกผูกอยู่ซึ่งวิ่งไปรอบๆ ทั้งสองด้านของเรือและโผล่ออกมาห่างจากแขนควบคุมของมอเตอร์ไฟฟ้าประมาณ 2 ฟุต การดึงแขนควบคุมด้วยมือจับบังคับเลี้ยวจะเป็นการดึงแขนควบคุมของมอเตอร์ทางด้านขวา ส่งผลให้เรือเลี้ยวไปทางขวา (Starboard) ด้านล่างคือรูปภาพของกลไกการบังคับเลี้ยว ส่วนแขนบังคับเลี้ยวนั้นแสดงอยู่ในรูปภาพของมอเตอร์ในส่วนที่ 2
การสร้างกลไกการบังคับเลี้ยวนั้นตรงไปตรงมา แขนคันโยกหนา ¼ นิ้ว ทำจากแท่งอลูมิเนียมหนา 1/8 นิ้วสองแท่ง กว้างประมาณ 1 ¼ นิ้ว (กว้างเท่ากับเส้นผ่านศูนย์กลางของมือจับ) ส่วน 1/8 นิ้วทั้งสองชิ้นยาว 9 และ 10 นิ้ว พวกมันถูกยึดเข้าด้วยกันด้วยสกรู Stainless steel หัวเรียบเบอร์ #8 ยาว ½ นิ้ว พร้อม Lock-nuts 4 ตัว เพื่อให้ส่วนบนของแท่งเสมอกัน
รูจุดหมุนเป็นรูขนาด 3/8 นิ้ว เจาะห่างจากด้านล่างของแท่งที่ยาวที่สุด 5 ½ นิ้ว มันรองรับ Bolt ขนาด 3/8 นิ้วที่ไม่มีเกลียวในช่วงระยะ ½ นิ้ว (เพื่อให้ได้ผิวสัมผัสการหมุนที่เรียบ) ส่วนที่เป็นเกลียวของ Bolt จะถูกตัดให้เรียบเสมอกับปลายของ Lock-nut

อีกครึ่งหนึ่งของจุดหมุนจะยึดกลไกเข้ากับด้านข้างของเรือ ประกอบด้วยแท่งอลูมิเนียมกว้าง 1 ½ นิ้ว หนา ¼ นิ้ว (หรือแท่งหนา 1/8 นิ้วสองแท่ง) มันถูกยึด (ด้วยสกรู 2 ตัวที่เหมาะสม) เข้ากับไม้รอง (Spacer block) ยาว 5 นิ้ว กว้างประมาณ 3 นิ้ว และหนา 2 นิ้ว ด้านหลังของไม้รองต้องถูกปาดให้เข้ากับส่วนโค้งของด้านข้างเรือและให้มีความหนาที่ยอมให้แขนจุดหมุนผ่านร่องที่ด้านบนของคายัคได้ ดังที่แสดงในรูปภาพของกล่องควบคุมและมือจับ (ด้านบน) เครื่องขัดกระดาษทรายแบบสายพานช่วยงานปาดแต่งนี้ได้ดีมาก
กลไกการบังคับเลี้ยวและไม้รองจะถูกยึดเข้ากับเรือด้วยสกรู Stainless steel ขนาด ¼ นิ้ว ยาว 3 นิ้ว สองตัวพร้อม Lock-nuts สกรูเหล่านี้จะเจาะผ่านไม้รองและแท่งจุดหมุน ¼ นิ้ว ตามที่เห็นในรูปแขนจุดหมุนด้านบน
ส่วนสุดท้ายของระบบบังคับเลี้ยวคือมือจับซึ่งจะติดตั้งเข้ากับแขนบังคับเลี้ยว เช่นเดียวกับไม้รอง มันทำจากไม้ 2 x 4 ที่ผ่านการอบน้ำยา ส่วนตัดขวางเป็นรูปแปดเหลี่ยมเส้นผ่านศูนย์กลางประมาณ 1 1/4 นิ้ว ขั้นแรกตัดไม้ 2 x 4 ยาว 7 นิ้ว แล้วทำให้เป็นรูปสี่เหลี่ยมจัตุรัส 1 ¼ นิ้ว จากนั้นปรับรั้วและมุมของใบเลื่อยบนโต๊ะเลื่อย ก็จะได้รูปแปดเหลี่ยมที่ดูเป็นมืออาชีพ ร่องขนาด ¼ นิ้วถูกตัดที่ปลายด้านหนึ่งของมือจับเพื่อให้แขนบังคับเลี้ยวสวมเข้าไปได้พอดี แขนจะถูกล็อคเข้าที่ด้วยสกรูเบอร์ #6 ยาว 1 1/2 นิ้ว สองตัวพร้อม Lock-nuts
สิ่งที่เทียบเท่ากับ Transom (ท้ายเรือ) เป็นสิ่งจำเป็นสำหรับการติดตั้งมอเตอร์ไฟฟ้าบนเรือคายัค มีพื้นที่เพียงพอสำหรับ Mini-transom ที่สร้างขึ้นเองกว้าง 7 ถึง 10 นิ้ว (ขึ้นอยู่กับความกว้างของคายัค) เพื่อรองรับตัวยึดมอเตอร์ซึ่งต้องการความกว้างอย่างน้อย 6 นิ้ว ความสูงที่เหมาะสมสำหรับ Transom คือ 3 ½ ถึง 4 นิ้ว และความหนา 2 1/2 นิ้ว บล็อกไม้ขนาดนั้นสามารถประกอบขึ้นจากไม้ 2 x 4 ที่ผ่านการอบน้ำยาในลักษณะดังนี้: ใช้ไม้ 2 x 4 จำนวน 2 ชั้น และไม้ 1 x 4 จำนวนหนึ่งชั้นทากาวติดกันเพื่อให้ได้ความสูงที่จำเป็น จากนั้นตกแต่งปลายบล็อกให้เข้ากับเส้นสายด้านข้างของคายัค ความหนา 2 ½ นิ้วถูกตัดด้วยเลื่อยโต๊ะ จากนั้นด้านล่างของบล็อกจะถูกปาดแต่งให้เข้ากับส่วนบนของคายัคดังที่เราเห็นในรูปด้านล่าง

ในการยึด Transom เข้ากับเรือ ผมใช้แกนเกลียว Stainless steel ขนาด ¼ นิ้ว ซึ่งทำหน้าที่สองอย่างคือ นำกระแสไฟมอเตอร์จากภายในเรือมายังพื้นผิวของ Transom ทางด้านซ้ายมีแกนเกลียวสองอัน ส่วนทางด้านขวามีเพียงอันเดียว ระวังให้แกนเกลียวที่มีกระแสไฟแยกออกจากกันและห่างจากโครงยึดมอเตอร์ให้มากที่สุด เพื่อไม่ให้เกิดการลัดวงจรเมื่อขันสายแบตเตอรี่ที่เชื่อมต่อกับมอเตอร์ให้แน่น
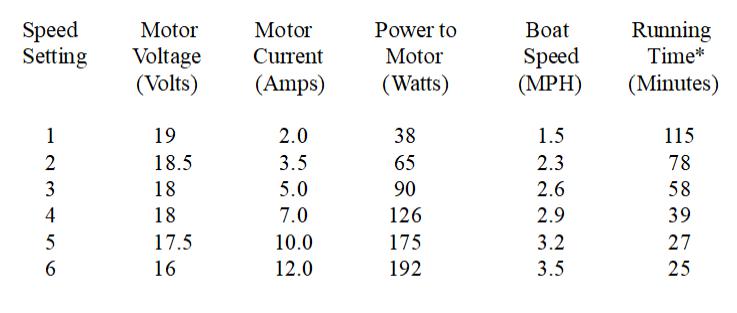
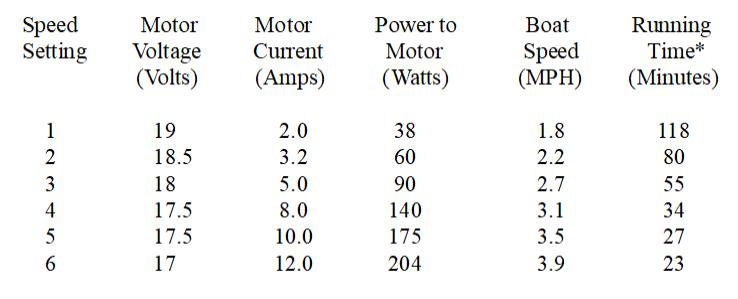
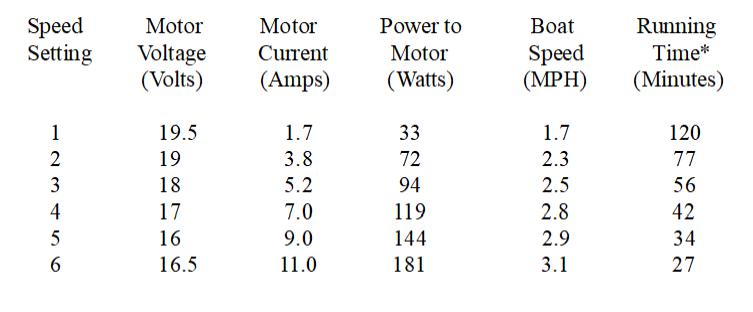
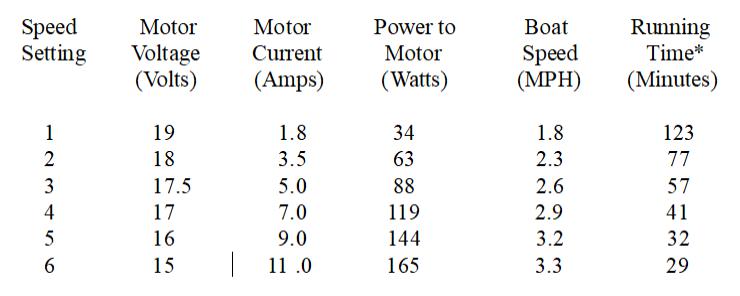
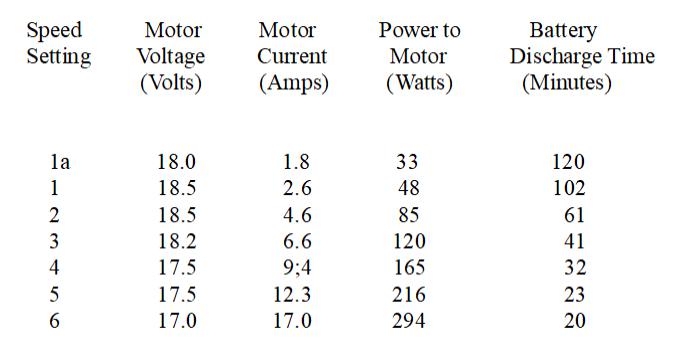
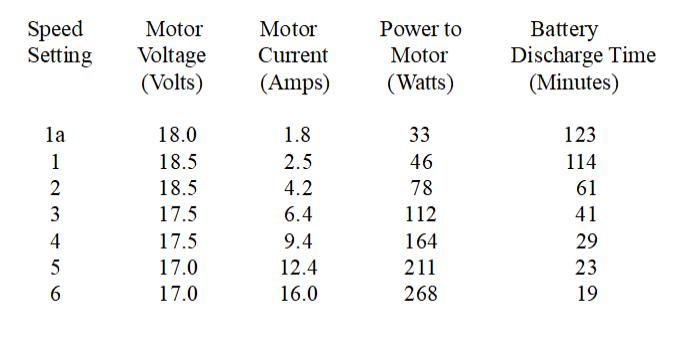
ด้วยคายัคสองลำและมอเตอร์สองตัว เรามี 4 รูปแบบการติดตั้งเพื่อเปรียบเทียบผลลัพธ์ประสิทธิภาพสี่ชุด ข้อมูลที่สำคัญที่สุดที่ต้องรวบรวมคือประสิทธิภาพของแต่ละรูปแบบการติดตั้ง จะถูกกำหนดโดยระยะเวลาการทำงานที่ได้จากปริมาณพลังงานที่ใช้ในหน่วย Watt ข้อมูลที่สำคัญพอๆ กันคือความเร็วสูงสุดที่ทำได้ในแต่ละระดับความเร็ว
แผนภูมิสี่ภาพด้านล่างแสดงข้อมูลนี้ สำหรับการตั้งค่าความเร็วเดินหน้าทั้งหกระดับของแต่ละรูปแบบ มีการวัดข้อมูลดังนี้: แรงดันแบตเตอรี่และกระแสไฟฟ้า (ซึ่งเมื่อคูณกันจะได้กำลังไฟเป็น Watt) และความเร็ว สำหรับระยะเวลาการทำงาน ได้จากการทดสอบแยกต่างหาก (การทดสอบในถังน้ำ) รูปแบบการติดตั้งทั้งสี่มีดังนี้:
A. คายัคแบบ Sit-in (สีแดง) พร้อม trolling motor ของ Minn-Kota (M-K)
B. คายัคแบบ Sit-in พร้อม trolling motor ของ Newport Vessels (N-V)
C. คายัคแบบ Sit-upon (สีคอรัล) พร้อมมอเตอร์ Minn-Kota
D. คายัคแบบ Sit-upon พร้อมมอเตอร์ Newport Vessels
ค่าแรงดันและกระแสอ่านได้จากมิเตอร์บนคอนโซล กำลังไฟในหน่วย Watt มาจากการคำนวณ ส่วนความเร็วได้จากแอปดาวเทียม ”MPH” บน iPhone ของผม มันทำงานได้ดีมากเมื่อวางไว้ในเรือ ผมใช้ที่วางแก้วซึ่งใช้งานได้ดีกว่าการพยายามถือโทรศัพท์ไว้ในมือ
ระยะเวลาการทำงานถูกกำหนดโดยใช้ผลการทดสอบในถังน้ำที่อธิบายไว้ด้านล่าง
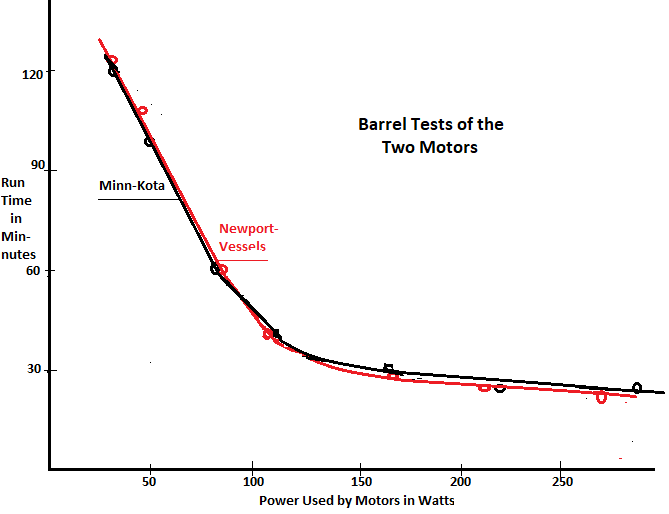
การกำหนดระยะเวลาการทำงาน หรือระยะเวลาที่มอเตอร์สามารถทำงานต่อเนื่องได้ด้วยแบตเตอรี่ 4 AH หรือ 6 AH ที่ชาร์จเต็มหนึ่งก้อนนั้นเป็นงานที่ต้องใช้เวลา มอเตอร์แต่ละตัวต้องรันที่ระดับความเร็ว 6 ระดับ รวมเป็นเวลาเกือบ 7 ชั่วโมง ซึ่งในระหว่างนั้นสภาพอากาศบนผิวน้ำอาจเปลี่ยนแปลงได้ ผลลัพธ์ที่แม่นยำกว่าสามารถทำได้โดยการรันมอเตอร์ภายใต้สภาวะที่มีการควบคุมในถังที่เต็มไปด้วยน้ำ แม้จะมีความปั่นป่วนในถังมากกว่า แต่ตราบใดที่การกินไฟจากแบตเตอรี่ใกล้เคียงกับตอนที่มอเตอร์ขับเคลื่อนเรือ ผลลัพธ์ก็ถือว่าใช้ได้ ตัวเลขระยะเวลาการทำงานได้มาจากความต้องการการทดสอบในถัง กราฟและแผนภูมิสองภาพด้านล่างแสดงระยะเวลาการทำงานสำหรับมอเตอร์แต่ละตัว
สังเกตว่ามีการเพิ่มตำแหน่ง 1a เข้าไปในตำแหน่งเดินหน้า 6 ระดับสำหรับการทดสอบในถังน้ำ มันถูกเพิ่มเข้ามาเพื่อสร้างความเร็วที่ต่ำลงพร้อมการกินไฟแบตเตอรี่ที่น้อยลง ซึ่งสอดคล้องกับตำแหน่งที่ 1 เมื่อใช้งานมอเตอร์ขับเคลื่อนเรือในน้ำเปิด การทดสอบแสดงให้เห็นว่าในน้ำเปิด การกินไฟแบตเตอรี่น้อยกว่าในน้ำที่ปั่นป่วนในถังอย่างมากสำหรับตำแหน่งความเร็วเดียวกัน ในการรันการทดสอบในถังสำหรับตำแหน่ง 1a เราเพียงแค่ลดตัวเลข PWM ของตำแหน่งที่ 1 จาก 60 เป็น 55
แผนภูมิสองภาพด้านล่างแสดงระยะเวลาการทำงานของมอเตอร์แต่ละตัวสำหรับตำแหน่งเดินหน้าทั้ง 7 ตำแหน่ง (รวมตำแหน่ง 1a) ข้อมูลนี้ซึ่งพล็อตบนกราฟที่แสดงด้านล่าง ถูกใช้เพื่อกำหนดระยะเวลาการทำงานของแต่ละตำแหน่งในผลการทดสอบในน้ำ แบตเตอรี่พิกัด 4 AH ถูกนำมาใช้ในการทดสอบเหล่านี้ หากใช้แบตเตอรี่ 6 AH ผลลัพธ์จะเพิ่มขึ้น 50% คือใช้งานได้ 3 ชั่วโมงสำหรับตำแหน่ง 1a สังเกตว่าแบตเตอรี่มีคุณลักษณะที่เหมือนกันเมื่อใช้กับมอเตอร์ทั้งสองรุ่น
เมื่อเราเชื่อมโยงระยะเวลาการทำงานกับความเร็วเรือ (ซึ่งเป็นตัวกำหนดระยะทาง) เราสามารถนำค่าเฉลี่ยจากรูปแบบการติดตั้งทั้งสี่แบบมานำเสนอเป็นแผนภูมิผลลัพธ์ดังนี้ สำหรับแต่ละการตั้งค่าความเร็ว เราจะมีความเร็วเรือเฉลี่ยและระยะเวลาการทำงานเฉลี่ยที่ได้จากแบตเตอรี่ 4 AH ที่ชาร์จเต็ม
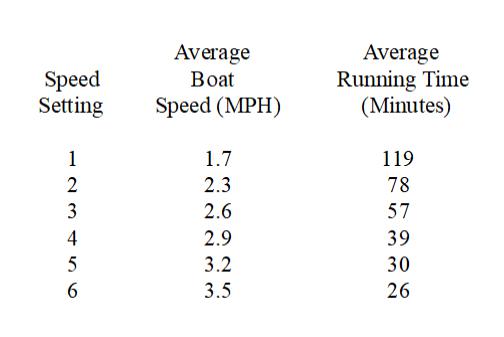
การขับเคลื่อนเรือขนาด 10 ฟุตที่ความเร็ว Trolling 1.7 MPH เป็นเวลาสองชั่วโมง หรือที่ความเร็วตัวเรือ (Hull speed) 3.5 MPH เป็นเวลาเกือบครึ่งชั่วโมง ด้วยแบตเตอรี่ Lithium-Ion 4 AH ขนาดเล็กเพียงก้อนเดียวถือเป็นความสำเร็จที่น่าทึ่ง ผมเป็นคนควบคุมเรือและมีน้ำหนัก 185 ปอนด์ ดังนั้นหากคนควบคุมน้ำหนักน้อยกว่านี้ ผลลัพธ์ก็จะดียิ่งขึ้นไปอีก ความเร็วเฉลี่ยของคนพายคายัคคือ 2.8 MPH
เหตุผลหลักที่ได้ผลลัพธ์ความเร็วต่ำที่ยอดเยี่ยมคือการใช้เทคนิค Pulse Width Modulation มันช่วยลดความเร็วอย่างมีประสิทธิภาพเมื่อเทียบกับ Resistors ที่สิ้นเปลืองพลังงานโดยการเปลี่ยนกำลังไฟส่วนเกินเป็นความร้อน ข้อดีเพิ่มเติมจากเทคนิค PWM คือ Software จะทำการแปลงแรงดันแบตเตอรี่ 18 volt ให้เป็น 12 volt ตามที่ trolling motor ต้องการไปพร้อมๆ กัน
ในการสร้างระบบขับเคลื่อนมอเตอร์แบบ PWM เราได้สร้างคอนโซลสองชุดสำหรับเสียบแบตเตอรี่แพ็ก ส่วนประกอบ Electronics อีกสองชิ้นในคอนโซลคือ Arduino Uno ซึ่งสร้างสัญญาณ PWM ภายใต้การควบคุมของ Sketch ที่เรียบง่ายมาก และ Cytron driver ขนาด 20 amp ที่ออกแบบมาเพื่อรันมอเตอร์หุ่นยนต์ Cytron ต้องการสายสัญญาณเพียง 3 เส้นจาก Arduino Uno เนื่องจากความเรียบง่าย คอนโซลทั้งสองจึงทำงานได้อย่างไร้ที่ติทั้งในขั้นตอนการออกแบบ การสร้าง และการทดสอบโครงการ
แบตเตอรี่แพ็ก Ryobi ทำงานได้อย่างไร้ที่ติเช่นกัน ผมซื้อขนาด 4 AH มาสองก้อนในช่วงลดราคาที่ $100 ส่วนขนาด 6 AH ก็หาซื้อได้ทั่วไปแต่ราคาเกิน $100 ต่อก้อน ตรวจสอบให้แน่ใจว่าซื้อผลิตภัณฑ์ Ryobi ของแท้ มีสินค้า “ลอกเลียนแบบ” จำนวนมากในตลาดที่ไม่ได้มาตรฐาน AH ตามที่กล่าวอ้าง มีผู้รีวิวคนหนึ่งชี้ให้เห็นว่าสินค้าลอกเลียนแบบเหล่านี้มีน้ำหนักเบากว่าของแท้มาก
ต่างจากแบตเตอรี่ตะกั่วกรด แบตเตอรี่ Lithium-Ion มีขนาดเล็กและเบากว่ามาก และสามารถจ่ายไฟได้ตามพิกัด 4 AH ในทุกอัตราการคายประจุตั้งแต่ 2 amp ถึง 12 amp ไฟแสดงสถานะในตัวมีประโยชน์ในการตรวจสอบระดับประจุของแบตเตอรี่ เครื่องชาร์จก็ทำงานได้ดีเช่นกัน คุณสามารถคาดหวังการชาร์จจนเต็มได้ในเวลาประมาณสองชั่วโมง
การออกแบบนี้เน้นความรวดเร็วในการติดตั้งระบบขับเคลื่อนไฟฟ้า มีสายไฟเพียงสองเส้นที่ต้องต่อเข้ากับมอเตอร์ มอเตอร์ยึดติดกับ mini-transom ด้วย Wing nuts ขนาดใหญ่สองตัว สายบังคับเลี้ยวสามารถเกี่ยวเข้ากับแกนบังคับเลี้ยวได้ง่ายเพียงแค่เอียงมอเตอร์มาด้านหน้าโดยไม่ต้องปรับแต่งเพิ่มเติม
การทดสอบในถังน้ำช่วยให้ได้วิธีการที่ทำซ้ำได้สำหรับการสร้างกราฟที่จำเป็นในการกำหนดระยะเวลาการทำงานของการตั้งค่าความเร็วทั้ง 6 ระดับ การทำงานต่อเนื่องจนหมดประจุแบตเตอรี่ช่วยยืนยันความน่าเชื่อถือของ Electronics และโดยเฉพาะอย่างยิ่ง Cytron motor drive module ซึ่งมีอุณหภูมิแค่เพียงอุ่นๆ เมื่อตรวจสอบ
การทดสอบในน้ำแสดงให้เห็นว่าความเร็วทั้ง 6 ตำแหน่งตอบสนองอย่างถูกต้องต่อตัวเลข PWM ที่เลือกในแต่ละตำแหน่ง ตำแหน่งที่ 3 ให้ความเร็วเฉลี่ย 2.6 MPH ซึ่งใกล้เคียงกับความเร็วเฉลี่ยของคนพายที่ 2.8 MPH ที่ความเร็วนี้ ซึ่งผลิตกำลังประมาณ 1/8 แรงม้า แบตเตอรี่ 4 AH จะขับเคลื่อนคายัค 10 ฟุตได้นาน 57 นาที เป็นระยะทางประมาณ 2.5 ไมล์
การทดสอบในน้ำยังแสดงให้เห็นว่า ตัวเรือแบบ Displacement Hull ดั้งเดิมของคายัคแบบ sit-in นั้นเร็วกว่าตัวเรือแบบแบนของคายัคแบบ sit-upon เล็กน้อย คายัคสีแดง (sit-in) มีความยาวแนวน้ำ 9 ฟุต ซึ่งให้ความเร็วตัวเรือ (Hull speed) เท่ากับ 3 x 1.34 เท่ากับ 4 Knots หรือ 4.6 MPH เราเกือบจะทำความเร็วนี้ได้ด้วยมอเตอร์ตัวใดตัวหนึ่งโดยใช้กำลังไฟประมาณ 200 watt (ประมาณ ¼ แรงม้า)
อะไรที่สามารถปรับปรุงได้อีก? หากผมจะทำมันอีกครั้ง ผมจะให้ความสำคัญกับการทำให้คอนโซลกันน้ำได้มากกว่านี้ ผมไม่เจอปัญหาน้ำเข้าระหว่างการทดสอบ แต่ผมเห็นว่ามันอาจเป็นปัญหาได้ในระยะยาว อีกส่วนหนึ่งที่การออกแบบสามารถปรับปรุงได้คือระบบบังคับเลี้ยว ควรได้รับการแก้ไขเพื่อให้สามารถเลี้ยวได้แคบกว่านี้ บางทีการพาดสายเคเบิลแบบกากบาทอาจจะช่วยได้
ส่วนหนึ่งของความสนุกในการใช้เวลาหนึ่งวันบนผิวน้ำคือการสามารถจัดการกับภาระในการเตรียมเรือให้พร้อมใช้งาน มีน้อยคนนักที่มีท่าเรืออยู่ที่หลังบ้านซึ่งทำให้สามารถกระโดดลงเรือได้ทุกเมื่อที่ต้องการ อย่างไรก็ตาม แม้แต่เรือเหล่านั้นก็มักจะถูกใช้งานน้อยมาก สิ่งที่ดีรองลงมาคือการมีเรืออยู่ที่ท่าจอดเรือหรือที่จอดเรือที่ไหนสักแห่งที่ขับรถไปไม่ไกลจากบ้าน สำหรับพวกเราส่วนใหญ่ ความจริงเรื่องค่าใช้จ่ายบีบให้เราต้องลากเทรลเลอร์หรือขนเรือไปที่ชายหาดหรือจุดลงเรือด้วยรถยนต์หรือรถบรรทุก
สิ่งที่ไม่เหมาะกับผมคือการลากเทรลเลอร์เรือใบไปยังจุดลงเรือและใช้เวลานานในการเตรียมเรือให้พร้อม ผมเคยเห็นคนมาถึงจุดลงเรือ และแม้จะมีสองคนช่วยกันทำงาน ก็ยังต้องใช้เวลาเป็นชั่วโมงในการตั้งเสากระโดง, ปรับสายยึด, คลี่และติดตั้งใบเรือ, ติดตั้ง Outboard และนำเรือลงน้ำ จากนั้นพวกเขายังต้องหาที่จอดเรือและที่จอดรถพร้อมเทรลเลอร์อีก
ผมยังเคยลองใช้วิธีเรือยางเป่าลมด้วย แม้จะมีปั๊มที่ดีที่สุดไม่ว่าจะแบบมือหรือแบบไฟฟ้า มันก็ยังต้องใช้แรงมากในการเตรียมเรือ และเมื่อเสร็จแล้ว คุณอาจได้เรือที่ไม่ค่อยทนทานต่อคลื่นลมหรือใช้งานไม่สนุกนัก
ดังนั้น หลังจากลองมาหลายทางเลือก ผมมีความสุขที่จะตกลงใจกับคายัคที่ผมสามารถจัดการได้ด้วยตัวเองและเตรียมพร้อมลงน้ำได้ในไม่กี่นาที คายัคขนาด 10 ฟุตที่กล่าวถึงข้างต้นหนักเพียง 40 ปอนด์ โหลดขึ้นรถยนต์หรือรถบรรทุกได้ง่าย หรือบรรทุกบนหลังคาก็ได้ ผมเคยบรรทุกเรือแคนูและเรืออลูมิเนียมด้วยวิธีนั้น แต่ผมไม่เคยรู้สึกสบายใจเลยที่ต้องขับรถด้วยความเร็วสูงพร้อมกับสิ่งของขนาดใหญ่บนหลังคา ทางเลือกอื่นคือบรรทุกเรือไว้ที่ด้านหลังรถ SUV (ซึ่งสูงจากพื้นเพียง 30 นิ้ว) และเปิดฝาท้ายทิ้งไว้บางส่วน แต่นี่ทำให้เกิดปัญหาตามมาสองอย่าง: ภายในรถสกปรก และฝาท้ายที่เปิดอยู่ทำให้เกิดลมและเสียงดังมากที่ความเร็วบนทางหลวง ปัญหาเรื่องความสกปรกสามารถบรรเทาได้โดยการปล่อยให้คายัคแห้งสักครึ่งชั่วโมงและปัดหรือเช็ดทรายออกด้วยผ้าขนหนู
แต่เสียงรบกวนสามารถลดลงได้อย่างมากด้วย Baffle (แผ่นกั้น) ระดับเสียงจะลดลงจนเหมือนแค่เปิดหน้าต่างหลังทิ้งไว้แทนที่จะเปิดฝาท้ายค้างไว้ ภาพด้านล่างแสดง Baffle ที่ผมสร้างขึ้นเพื่อลดเสียงและลม รวมถึงช่วยยึดคายัคให้อยู่กับที่ด้วย Baffle ทำจากไม้อัด 3/8 นิ้ว ขนาด 2 x 4 ฟุต เพื่อปรับปรุงรอยต่อระหว่างรถกับ Baffle ส่วนบนขนาด 8 นิ้วทำจากโฟมหนา 2 นิ้วซึ่งปรับตัวเข้ากับส่วนโค้งของหน้าต่างหลังได้ Home Depot มีโฟมแผ่นสี่เหลี่ยมขนาด 22 X 22 นิ้ว หนา 2 นิ้ว ขายในราคาประมาณ $5 ในรถของผม Baffle สามารถยึดได้ด้วยกลอนเล็กๆ (Barrel bolt latches) สองตัว (ราคา $4) ที่เลื่อนเข้าไปในรูที่มีอยู่เดิมซึ่งปกติใช้สำหรับชั้นวาง
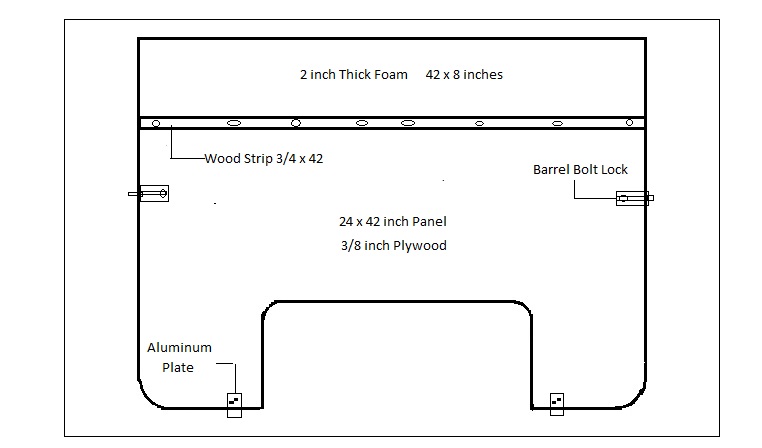
โฟมสองชิ้นขนาดประมาณ 8 x 21 นิ้วแต่ละชิ้น ถูกยึดเข้ากับแผงในลักษณะดังนี้: ใช้มีดไฟฟ้าหรือเลื่อยจิ๊กซอว์ไฟฟ้าตัดร่องลึก 1 ½ นิ้วที่ตรงกลางของโฟม เพื่อให้โฟมสามารถเลื่อนทับส่วนบนของไม้อัดได้ เจาะรูขนาด 3/16 นิ้ว สี่รูในโฟมแต่ละชิ้นผ่านแถบไม้ขนาด ¾ นิ้ว ทั้งด้านหน้าและด้านหลัง และผ่านส่วนบนของแผงไม้อัด รูที่ผ่านโฟมต้องเจาะให้ทะลุ ผมใช้สกรูเบอร์ #8 พร้อม Lock-nuts ยาว 2 นิ้ว แต่สกรูยาว 2 ½ นิ้วจะช่วยให้การประกอบง่ายขึ้นมาก
ด้านล่างของแผงถูกยึดไว้ด้วยแผ่นอลูมิเนียม 1/8 นิ้ว ขนาด 1 ½ x 2 ½ นิ้ว สองแผ่น พวกมันสอดเข้าไประหว่างพรมและแผงตกแต่งของรถดังที่เห็นในรูปด้านล่าง

คายัคจะยื่นออกมาจากฝาท้ายประมาณ 18 นิ้ว ซึ่งฝาท้ายจะลงมาวางพักบนเรือ การใช้เบาะรองระหว่างฝาท้ายและเรือช่วยเลี่ยงรอยขีดข่วนและการสั่นสะเทือน ต้องใช้สายรัด (Shock chords) ที่แข็งแรงสองเส้นเพื่อยึดฝาท้ายลงมา ในรถของผมจะมีเสียงเตือนเมื่อขับรถขณะเปิดฝาท้ายทิ้งไว้ ปัญหานั้นแก้ไขได้ง่ายๆ เสียงเตือนสามารถถูกหลอกให้คิดว่าฝาท้ายล็อคอยู่ได้โดยการดันกลไกล็อคให้ไปอยู่ในตำแหน่งปิดด้วยไขควงปากแบน อย่าลืมปลดล็อคมัน (โดยใช้รีโมท) ก่อนจะปิดฝาท้ายจริง
การลงเรือคายัค
การนำคายัคลงน้ำนั้นง่ายมาก ลากมันไปที่น้ำและยึด trolling motor เข้ากับ Transom ด้วยลูกบิดขนาดใหญ่ กำลังไฟไปยังมอเตอร์ได้มาจาก Terminal 2 จุดที่ยื่นออกมาจาก Transom (สีแดงคือ + ไปที่ Bolt ตัวหน้า) จากนั้นเอียงมอเตอร์มาข้างหน้าและเกี่ยวปลายสายบังคับเลี้ยวทั้งสองข้างเข้ากับแกนบังคับเลี้ยว ปล่อยมอเตอร์กลับลงมาในตำแหน่งล็อคเพื่อตึงสาย จากนั้นเสียบแบตเตอรี่แพ็กเข้าที่ในกล่องควบคุม และคุณก็พร้อมออกเดินทางเพื่อวันพักผ่อนที่สนุกสนานบนผิวน้ำได้อย่างรวดเร็ว
สนับสนุนเพื่อรับ Source Code หรือแอปพลิเคชันสำหรับโปรเจกต์นี้
ประเมินราคาอัตโนมัติ + Reference Code
กรอกข้อมูลให้ครบ ระบบจะสร้างรหัสอ้างอิงและประเมินราคา/ระยะเวลาคร่าว ๆ จากรายละเอียดงาน แล้วให้กด Add LINE พร้อมพิมพ์รหัสนี้เพื่อคุยต่อ
ส่งข้อมูลเรียบร้อย
ขั้นตอนต่อไป: กดปุ่มด้านล่าง ระบบจะคัดลอกข้อความพร้อม Reference Code ให้ แล้วพาไปหน้า LINE ทันที เอาข้อความนั้นส่งใน LINE เพื่อให้ทีมงานดึงข้อมูลจากฟอร์มนี้มาต่อได้เลย
Reference Code
รีวิวจากคนใช้งานจริง
ถ้าเคยสั่งงาน เคยอ่านหน้านี้แล้วได้ประโยชน์ หรือมีข้อเสนอแนะ ฝากรีวิวไว้ได้เลย
ยังไม่มีรีวิวบนหน้านี้ ถ้าเคยใช้งานหรือมีข้อเสนอแนะ เขียนเป็นคนแรกได้เลย
