Easy
โปรเจกต์ ควบคุม Hexbug Spider ด้วย Arduino
สร้างหุ่นยนต์ของคุณเอง โดยจะทำให้ส่วนนี้เป็นส่วนหนึ่งของโปรเจกต์ Hexbug Spider ที่ควบคุมด้วย Arduino ซึ่งเป็นระบบควบคุมที่ใช้ Arduino เป็นพื้นฐาน พร้อมการควบคุมการเลี้ยว

สร้างหุ่นยนต์ของคุณเอง โดยจะทำให้ส่วนนี้เป็นส่วนหนึ่งของโปรเจกต์ Hexbug Spider ที่ควบคุมด้วย Arduino ซึ่งเป็นระบบควบคุมที่ใช้ Arduino เป็นพื้นฐาน พร้อมการควบคุมการเลี้ยว

▶ กดเพื่อดูวิดีโอสาธิตโปรเจกต์
‘สร้างหุ่นยนต์ของคุณเอง’ ในส่วนนี้ของโปรเจกต์เราจะทำการควบคุม Hexbug Spider ด้วย Arduino โดยใช้ระบบควบคุมพื้นฐานจาก Arduino พร้อมฟังก์ชันควบคุมการเลี้ยวและการทำงานต่างๆ ระบบควบคุมนี้จะทำให้โปรเจกต์ของเราสมบูรณ์โดยรองรับการสั่งงานทั้งผ่านโทรศัพท์และคอมพิวเตอร์
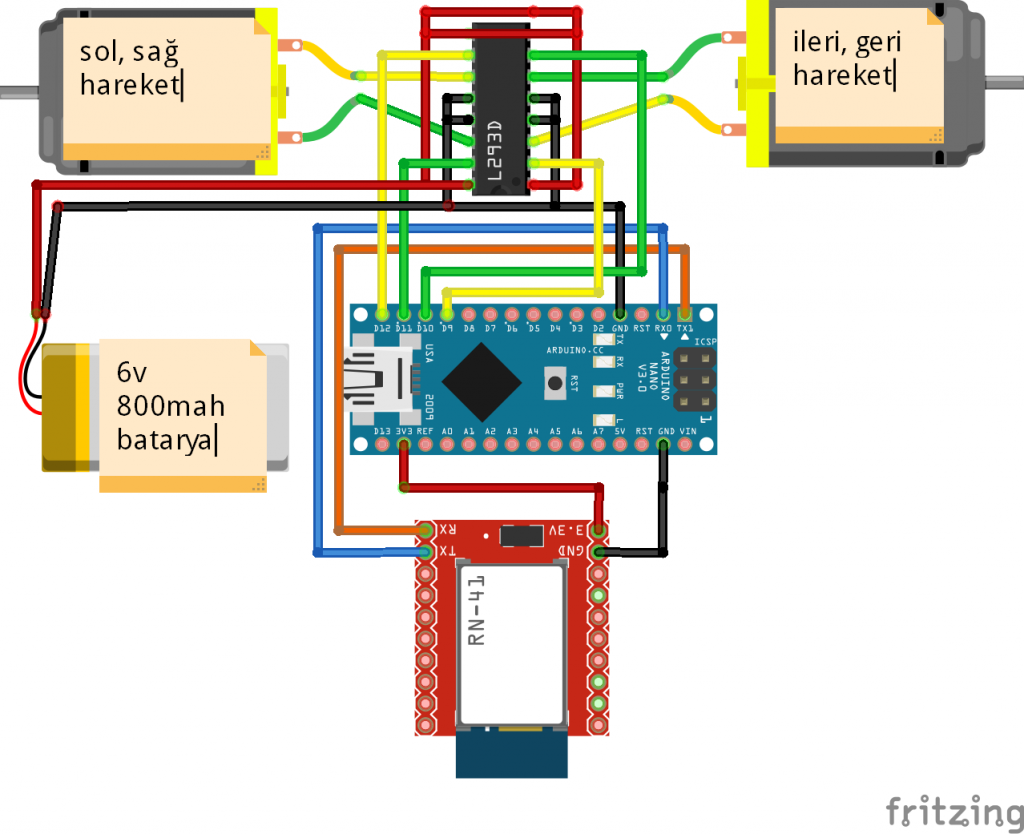
ขั้นแรก ให้ถอดสกรูที่ฝาครอบแบตเตอรี่ของ Hexbug Spider ออก ปกติจะใช้แบตเตอรี่ AAA 3 ก้อน ซึ่งทำงานที่แรงดันไฟรวม 4.5 Volts ในส่วนฐานจะมีสกรูอยู่ 3 ตัว เมื่อถอดสกรูออกแล้วจะเข้าถึงส่วนของวงจร เราจะตัดการเชื่อมต่อเดิมทิ้งและเปลี่ยนไปใช้ 6V battery แทน ตัว Hexbug Spider มี Motor แบบ DC อยู่ 2 ตัว ตัวหนึ่งสำหรับเคลื่อนที่เดินหน้าถอยหลัง ส่วนอีกตัวสำหรับควบคุมทิศทาง
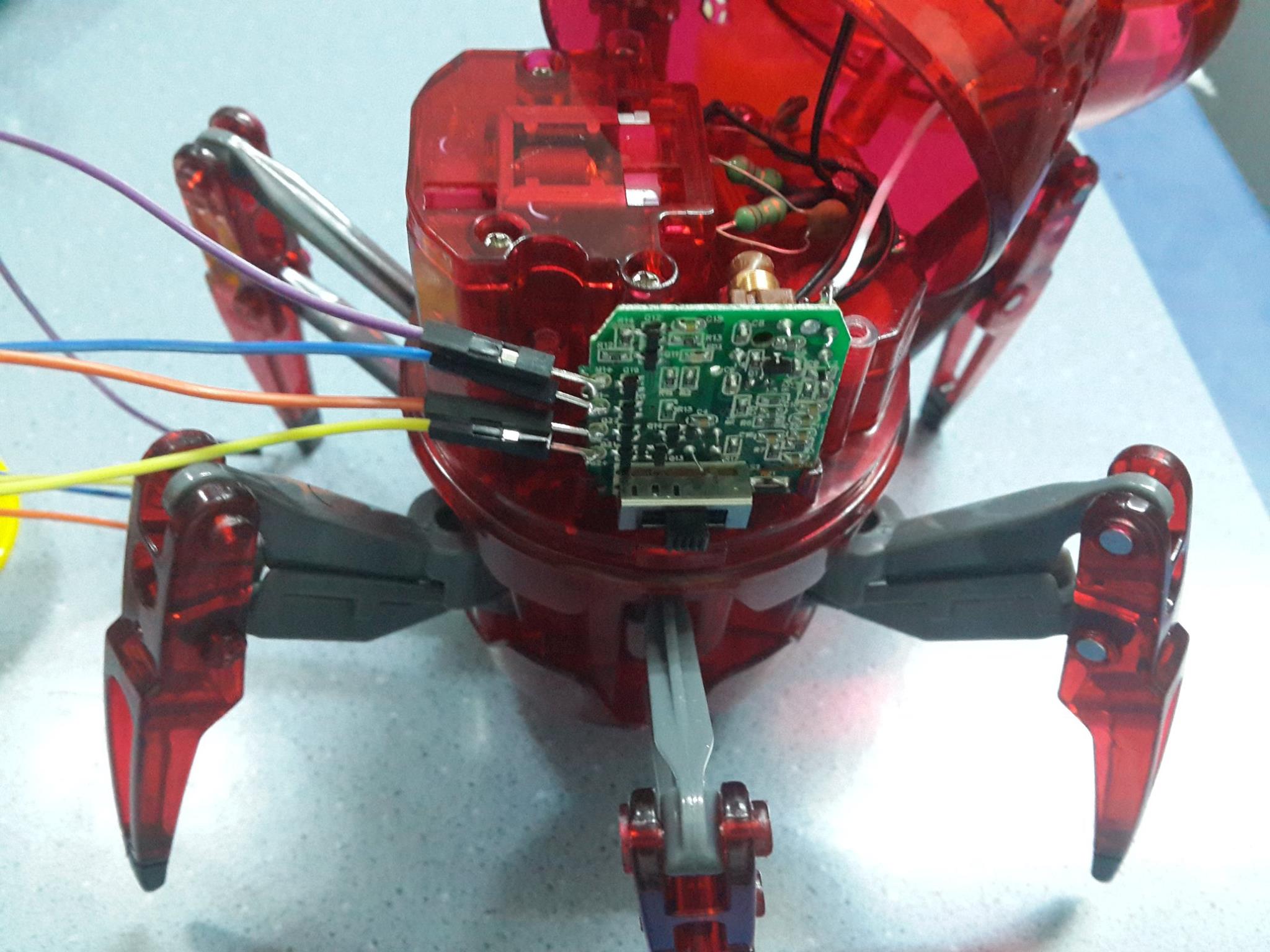
คุณจะเห็นจุดเชื่อมต่อของ Motor ในวงจร ให้ทำการบัดกรี Pins เพื่อเชื่อมต่อสายเคเบิลตามภาพด้านบนเข้ากับ Motor Drive ของเรา คุณสามารถเชื่อมต่อเข้ากับจุดที่เขียนว่า M1 และ M2 บนวงจรได้อย่างง่ายดาย Pins ด้านบนจะควบคุมการเคลื่อนที่ซ้ายและขวาของ Motor ส่วน Pins ด้านล่างจะควบคุมการเคลื่อนที่ไปข้างหน้าและข้างหลัง
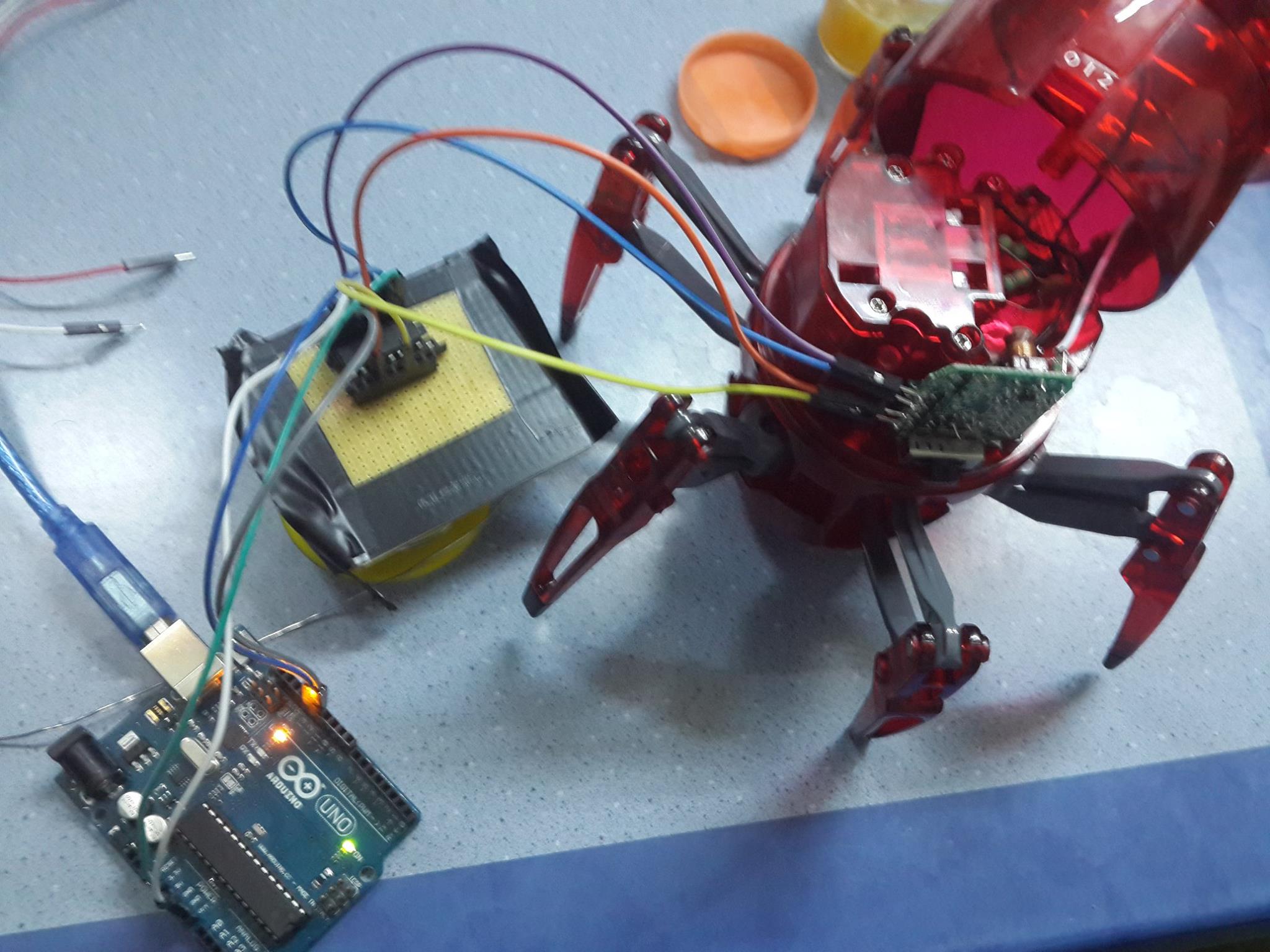
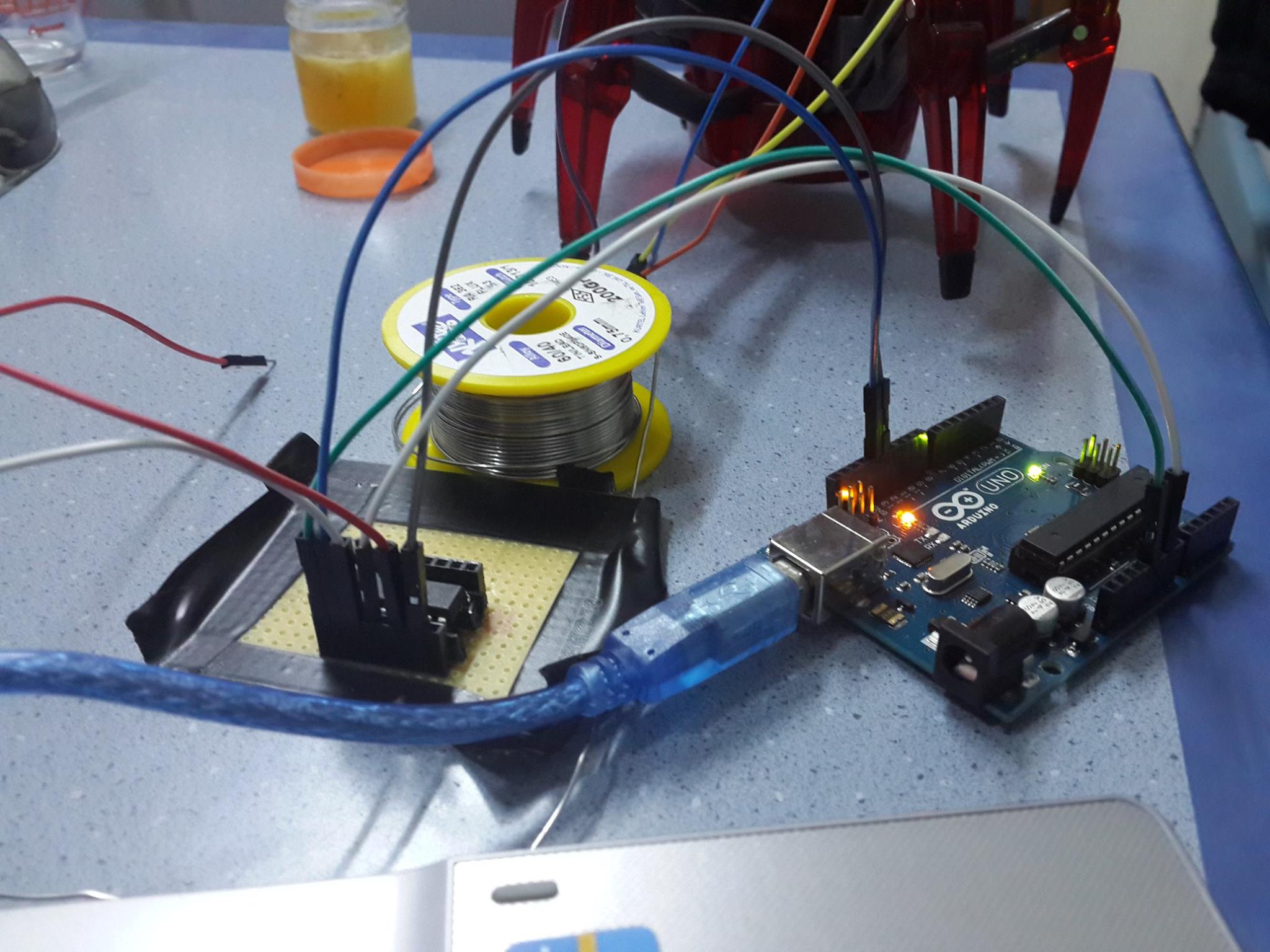
เราได้ทำการเชื่อมต่อ Pin ของมอเตอร์และเชื่อมต่อเข้ากับ Arduino เรียบร้อยแล้ว ตอนนี้ให้เชื่อมต่อ HC-06 Bluetooth Module เข้ากับ Arduino จากนั้นติดตั้งแบตเตอรี่เข้ากับ Motor Drive คุณสามารถแยกแหล่งจ่ายไฟให้กับ Motor Drive ของ Arduino ได้
หลังจากเชื่อมต่อวงจรทั้งหมดแล้ว มาดูที่ระบบควบคุมกัน เราจะควบคุม Spider ได้ 2 วิธี วิธีแรกคือผ่านโทรศัพท์ Android และวิธีที่สองคือผ่านคอนโซลควบคุมหุ่นยนต์จากคอมพิวเตอร์ที่เราเขียนโปรแกรมขึ้นมา
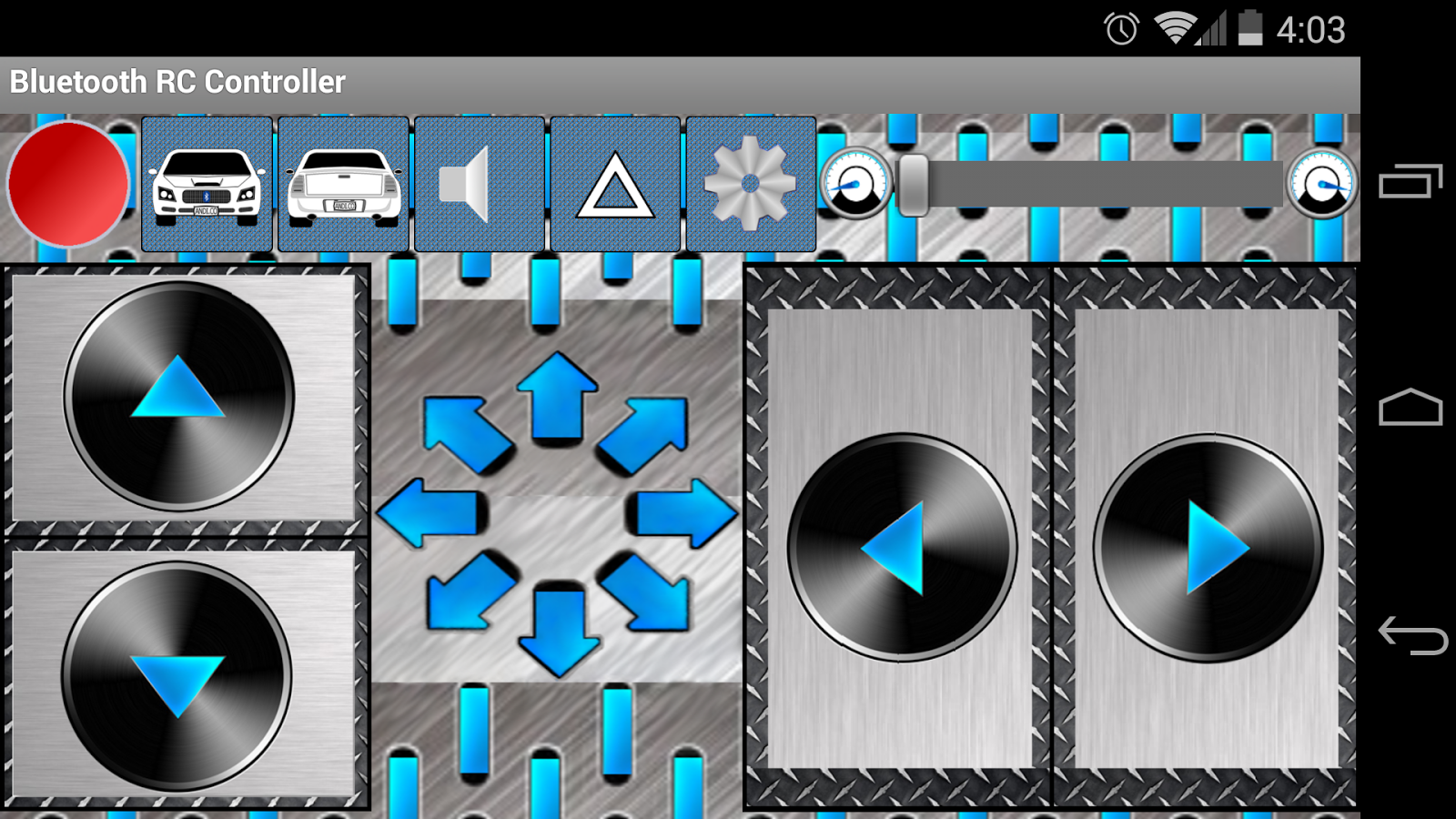
เพียงดาวน์โหลดแอปพลิเคชันแรกสำหรับควบคุมผ่านโทรศัพท์ได้จากลิงก์ด้านล่างนี้
คราวนี้เราจะสร้างซอฟต์แวร์บน Arduino ของเรา ซอฟต์แวร์จะทำงานตามตัวอักษรที่ถูกส่งมาจากการกดปุ่มในแอปพลิเคชัน เพื่อสั่งงานหุ่นยนต์ตามตัวอักษรที่กำหนดไว้
// Software development by Robimek - 2015
// Software development by Robimek
char val;
#define motorileri 9
#define motorgeri 10
#define motorsol 11
#define motorsag 12
int S;
void setup()
{
Serial.begin(9600);
pinMode(motorileri,OUTPUT);
pinMode(motorgeri,OUTPUT);
pinMode(motorsol,OUTPUT);
pinMode(motorsag,OUTPUT);
digitalWrite(motorileri,LOW);
digitalWrite(motorgeri,LOW);
digitalWrite(motorsol,LOW);
digitalWrite(motorsag,LOW);
}
void loop() {
if (Serial.available()) {
delay(100);
while(Serial.available() > 0){
val = Serial.read();
}if (val == 'S') {
dur();
}
if (val == 'F') {
ileri();
}if (val == 'R') {
geri();
}if (val == 'B') {
sag();
}if (val == 'L') {
sol();
}if (val == 'G') {
solileri();
}if (val == 'H') {
solgeri();
}if (val == 'I') {
sagileri();
}if (val == 'J') {
saggeri();
}
}
}
void dur()
{
digitalWrite(motorileri,LOW);
digitalWrite(motorgeri,LOW);
digitalWrite(motorsol,LOW);
digitalWrite(motorsag,LOW);
}
void ileri() {
digitalWrite(motorileri,HIGH);
digitalWrite(motorgeri,LOW);
digitalWrite(motorsol,LOW);
digitalWrite(motorsag,LOW);
}
void geri() {
digitalWrite(motorileri,LOW);
digitalWrite(motorgeri,HIGH);
digitalWrite(motorsol,LOW);
digitalWrite(motorsag,LOW);
}
void sol() {
digitalWrite(motorileri,LOW);
digitalWrite(motorgeri,LOW);
digitalWrite(motorsol,HIGH);
digitalWrite(motorsag,LOW);
}
void sag() {
digitalWrite(motorileri,LOW);
digitalWrite(motorgeri,LOW);
digitalWrite(motorsol,LOW);
digitalWrite(motorsag,HIGH);
}
void sagileri()
{
digitalWrite(motorileri,HIGH);
digitalWrite(motorgeri,LOW);
digitalWrite(motorsol,LOW);
digitalWrite(motorsag,HIGH);
}
void solileri()
{
digitalWrite(motorileri,HIGH);
digitalWrite(motorgeri,LOW);
digitalWrite(motorsol,HIGH);
digitalWrite(motorsag,LOW);
}
void saggeri()
{
digitalWrite(motorileri,LOW);
digitalWrite(motorgeri,HIGH);
digitalWrite(motorsol,LOW);
digitalWrite(motorsag,HIGH);
}
void solgeri()
{
digitalWrite(motorileri,LOW);
digitalWrite(motorgeri,HIGH);
digitalWrite(motorsol,HIGH);
digitalWrite(motorsag,LOW);
}
ติดตั้งซอฟต์แวร์ลงใน Board ของ Arduino เพื่อควบคุมผ่านโทรศัพท์ จากนั้นเชื่อมต่อ Bluetooth แล้วเปิดแอปพลิเคชันเพื่อเริ่มการควบคุม Spider ได้เลย
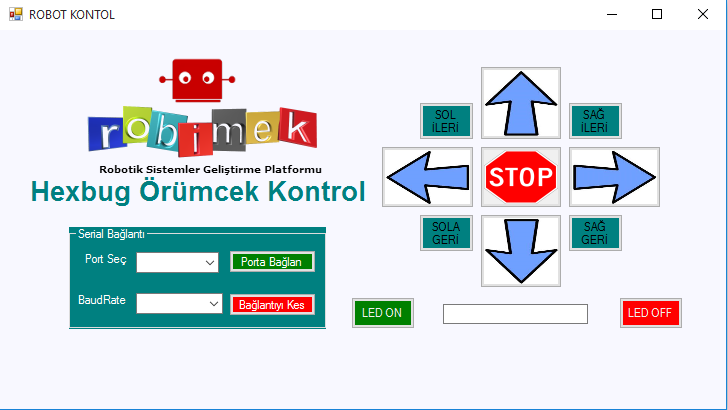
สำหรับการควบคุมจากคอมพิวเตอร์ เราจะใช้หน้าจอควบคุมหุ่นยนต์ Spider ที่สร้างด้วย Visual Basic ขั้นแรกให้ดาวน์โหลดโปรแกรมจากลิงก์ด้านล่างนี้
เราจะสร้างโค้ด Arduino โดยใช้ข้อมูลที่ส่งมาจากปุ่มกดในโปรแกรมซอฟต์แวร์
//Software development By Robimek - 2015
// Software Licensing By Robimek
char val;
#define motorileri 9
#define motorgeri 10
#define motorsol 11
#define motorsag 12
void setup()
{
Serial.begin(9600);
pinMode(motorileri,OUTPUT);
pinMode(motorgeri,OUTPUT);
pinMode(motorsol,OUTPUT);
pinMode(motorsag,OUTPUT);
digitalWrite(motorileri,LOW);
digitalWrite(motorgeri,LOW);
digitalWrite(motorsol,LOW);
digitalWrite(motorsag,LOW);
}
void loop() {
if (Serial.available()) {
delay(100);
while(Serial.available() > 0){
val = Serial.read();
}if (val == '9') {
dur();
}
if (val == '2') {
ileri();
}if (val == '1') {
geri();
}if (val == '4') {
sag();
}if (val == '3') {
sol();
}if (val == '5') {
solileri();
}if (val == '8') {
solgeri();
}if (val == '6') {
sagileri();
}if (val == '7') {
saggeri();
}
}
}
void dur()
{
digitalWrite(motorileri,LOW);
digitalWrite(motorgeri,LOW);
digitalWrite(motorsol,LOW);
digitalWrite(motorsag,LOW);
}
void ileri() {
digitalWrite(motorileri,HIGH);
digitalWrite(motorgeri,LOW);
digitalWrite(motorsol,LOW);
digitalWrite(motorsag,LOW);
}
void geri() {
digitalWrite(motorileri,LOW);
digitalWrite(motorgeri,HIGH);
digitalWrite(motorsol,LOW);
digitalWrite(motorsag,LOW);
}
void sol() {
digitalWrite(motorileri,LOW);
digitalWrite(motorgeri,LOW);
digitalWrite(motorsol,HIGH);
digitalWrite(motorsag,LOW);
}
void sag() {
digitalWrite(motorileri,LOW);
digitalWrite(motorgeri,LOW);
digitalWrite(motorsol,LOW);
digitalWrite(motorsag,HIGH);
}
void sagileri()
{
digitalWrite(motorileri,HIGH);
digitalWrite(motorgeri,LOW);
digitalWrite(motorsol,LOW);
digitalWrite(motorsag,HIGH);
}
void solileri()
{
digitalWrite(motorileri,HIGH);
digitalWrite(motorgeri,LOW);
digitalWrite(motorsol,HIGH);
digitalWrite(motorsag,LOW);
}
void saggeri()
{
digitalWrite(motorileri,LOW);
digitalWrite(motorgeri,HIGH);
digitalWrite(motorsol,LOW);
digitalWrite(motorsag,HIGH);
}
void solgeri()
{
digitalWrite(motorileri,LOW);
digitalWrite(motorgeri,HIGH);
digitalWrite(motorsol,HIGH);
digitalWrite(motorsag,LOW);
}
เมื่อติดตั้งซอฟต์แวร์แล้ว เราจะสามารถควบคุม Spider จากคอมพิวเตอร์ผ่าน Bluetooth ได้
‘สร้างหุ่นยนต์ของคุณเองจาก Hexbug Spider ในส่วนนี้ของโปรเจกต์เราได้นำเสนอการควบคุมทั้งผ่านโทรศัพท์และคอมพิวเตอร์ หากคุณต้องการ คุณสามารถติดตั้ง Ultrasonic Sensor เพิ่มเติมเพื่อให้หุ่นยนต์เคลื่อนที่แบบ Autonomous และหลบหลีกสิ่งกีดขวางได้ แล้วพบกันใหม่ในโปรเจกต์หน้า ขอให้สนุกกับการสร้างสรรค์ครับ
สนับสนุนเพื่อรับ Source Code หรือแอปพลิเคชันสำหรับโปรเจกต์นี้
ประเมินราคาอัตโนมัติ + Reference Code
กรอกข้อมูลให้ครบ ระบบจะสร้างรหัสอ้างอิงและประเมินราคา/ระยะเวลาคร่าว ๆ จากรายละเอียดงาน แล้วให้กด Add LINE พร้อมพิมพ์รหัสนี้เพื่อคุยต่อ
ส่งข้อมูลเรียบร้อย
ขั้นตอนต่อไป: กดปุ่มด้านล่าง ระบบจะคัดลอกข้อความพร้อม Reference Code ให้ แล้วพาไปหน้า LINE ทันที เอาข้อความนั้นส่งใน LINE เพื่อให้ทีมงานดึงข้อมูลจากฟอร์มนี้มาต่อได้เลย
Reference Code
รีวิวจากคนใช้งานจริง
ถ้าเคยสั่งงาน เคยอ่านหน้านี้แล้วได้ประโยชน์ หรือมีข้อเสนอแนะ ฝากรีวิวไว้ได้เลย
ยังไม่มีรีวิวบนหน้านี้ ถ้าเคยใช้งานหรือมีข้อเสนอแนะ เขียนเป็นคนแรกได้เลย
