Expert
โปรเจกต์ Ball Balancing Robot | Arduino Object Detection ผ่าน OpenCV
นี่คือ Ball-balancing Robot ที่สามารถทรงตัวลูกบอลให้อยู่ตรงกลางด้วย Object Detection และ Image Recognition ผ่าน Arduino และ Python

นี่คือ Ball-balancing Robot ที่สามารถทรงตัวลูกบอลให้อยู่ตรงกลางด้วย Object Detection และ Image Recognition ผ่าน Arduino และ Python
▶ กดเพื่อดูวิดีโอสาธิตโปรเจกต์
นี่คือหุ่นยนต์ทรงตัวลูกบอล (ball-balancing robot) ซึ่งจะพยายามรักษาความสมดุลของลูกบอลให้อยู่ตรงกลางด้วย Object Detection และ Image Recognition ผ่าน Arduino และ Python โดยเราได้ใช้ distance sensors และเทคนิค image recognition เพื่อช่วยในการรักษาความสมดุล
ผมต้องการทำให้ลูกปิงปองสามารถทรงตัวอยู่ตรงกลางระนาบได้ จึงได้ตัดสินใจสร้างหุ่นยนต์ตัวนี้ขึ้นมา
แนวคิดของหุ่นยนต์ทรงตัวลูกบอลนั้นเรียบง่ายมาก ลูกบอลจะต้องอยู่ตรงกลางของกล่อง หากลูกบอลกลิ้งไปทางซ้าย ตัวกล่องจะถูกยกขึ้นจากทางด้านซ้ายเพื่อให้ลูกบอลกลิ้งลงไปยังอีกฝั่งหนึ่ง กระบวนการนี้จะทำซ้ำไปเรื่อยๆ จนกว่าลูกบอลจะมาหยุดอยู่ที่ตรงกลาง
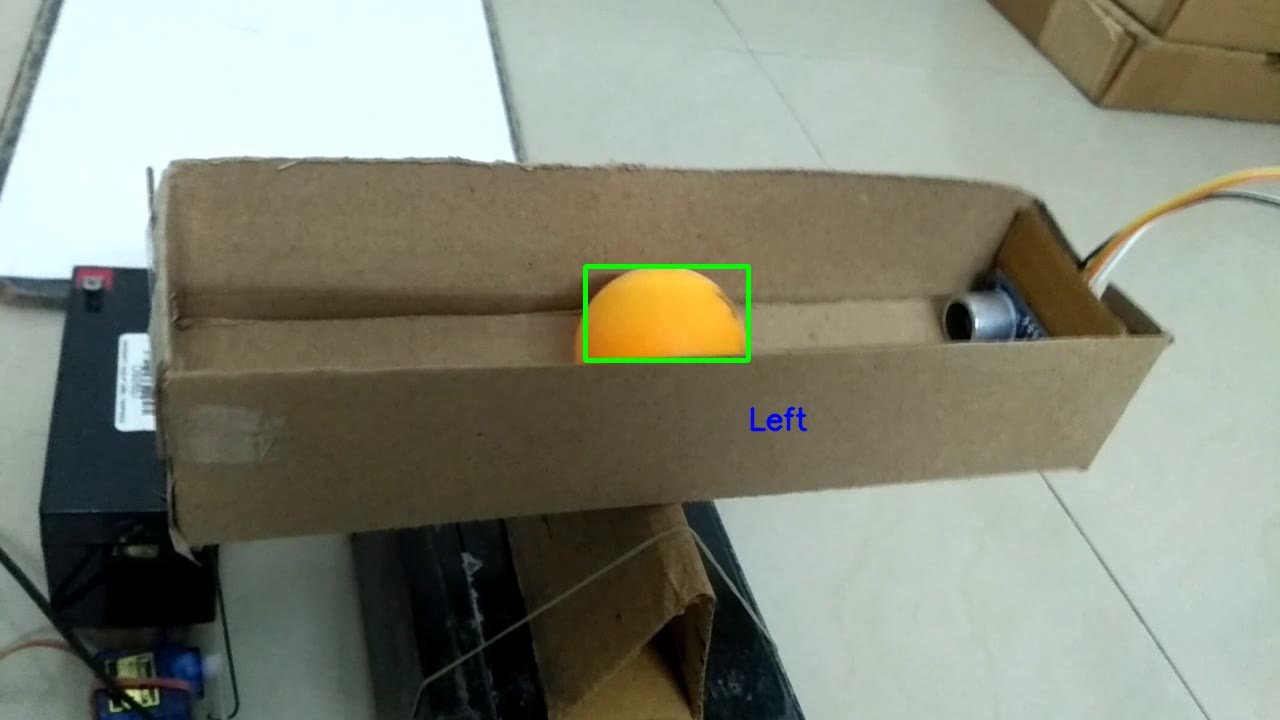
จากนั้นเราใช้เทคนิค image recognition ด้วย OpenCV ในภาษาโปรแกรม Python โดยมีการตั้งค่า threshold สำหรับสีส้ม ซึ่งระบบจะสร้างวงกลมล้อมรอบวัตถุสีส้มใดๆ ที่ตรวจพบผ่าน camera
มีเส้นสมมติที่แบ่งวิดีโอออกเป็นฝั่งซ้ายและฝั่งขวา
ดังนั้น เมื่อใดก็ตามที่ตรวจพบวัตถุทางด้านซ้าย ระบบจะแสดงคำว่า "left" เป็นสีฟ้า และเมื่อตรวจพบวัตถุทางด้านขวา จะแสดงคำว่า "right" เป็นสีแดง
หลังจากตรวจจับได้แล้ว Python จะส่งข้อมูลแบบ serial ไปยัง microcontroller และ microcontroller จะสั่งการให้ motor เคลื่อนที่ตามอินพุตที่ได้รับ ในช่วงเวลานี้ ultrasonic sensor จะถูกตัดการเชื่อมต่อ และการควบคุมการทรงตัวทั้งหมดจะถูกจัดการโดย camera และ servo
สนับสนุนเพื่อรับ Source Code หรือแอปพลิเคชันสำหรับโปรเจกต์นี้
