Easy
โปรเจกต์ สร้างสุดยอด Dry Ice Machine
Dry Ice Machine ที่ควบคุมผ่าน Bluetooth ใช้พลังงานจาก Battery พร้อมไฟ LED ในตัว... มีอะไรที่ไม่น่ารักบ้าง? แถมยังเป็นแบบ 3D-printed อีกด้วย

Dry Ice Machine ที่ควบคุมผ่าน Bluetooth ใช้พลังงานจาก Battery พร้อมไฟ LED ในตัว... มีอะไรที่ไม่น่ารักบ้าง? แถมยังเป็นแบบ 3D-printed อีกด้วย
เมื่อไม่นานมานี้ผมต้องการเครื่องทำ dry ice สำหรับใช้ทำเอฟเฟกต์ในการแสดงละครท้องถิ่น แต่งบประมาณของเราไม่เพียงพอสำหรับการเช่าเครื่องแบบมืออาชีพ ผมจึงสร้างเครื่องนี้ขึ้นมาแทน ซึ่งส่วนใหญ่เป็นชิ้นส่วนที่พิมพ์จาก 3D printer, ควบคุมจากระยะไกลผ่าน Bluetooth, ใช้พลังงานจากแบตเตอรี่, พกพาสะดวก และมี LEDs สำหรับเพิ่มเอฟเฟกต์ที่สวยงาม คุณยังสามารถออกแบบ Nozzle ของตัวเองเพื่อสร้างรูปแบบควันหมอกที่แตกต่างกันได้ โดยผมได้รวมแบบ Nozzle สองสไตล์ของผมไว้ให้คุณลองใช้งานด้วย
มันใช้งานได้ดีมากสำหรับเป็นเอฟเฟกต์บนเวที และจะเป็นที่นิยมอย่างมากในปาร์ตี้ Halloween ต่างๆ
หากคุณชอบทำตามวิดีโอแนะนำ ผมได้สร้างวิดีโอไว้ให้คุณรับชมแล้ว ซึ่งจะดีมากหากคุณต้องการเห็นว่าเครื่องนี้ทำงานอย่างไร - ผมได้แสดง Nozzle ทั้งสองแบบที่ผมออกแบบไว้ในช่วงต้นของวิดีโอด้วย
ส่วนคำแนะนำแบบเขียนและรูปภาพประกอบมีดังนี้...

แน่นอนว่าคุณต้องมีอุปกรณ์บางอย่างเพื่อสร้างเครื่องนี้ด้วยตัวเอง นี่คือรายการสิ่งของเหล่านั้นพร้อมลิงก์ที่คุณสามารถหาซื้อได้บน Amazon:
■ Elegoo Arduino Nano (x1): https://geni.us/ArduinoNanoV3
■ L298N Motor Driver (x1): https://geni.us/L298N
■ 8 AA Battery Holder (x1): https://geni.us/8aaBatteryHolder
■ AA Batteries (x8): https://geni.us/AABatteries
■ Mini breadboard (x1): https://geni.us/MiniBreadboard
■ 12v Geared DC Motor (x1): https://geni.us/12VGearedDCMotor
■ HM10 Bluetooth Module (x1): https://geni.us/HM10Bluetooth
■ Contact Switches (x2): https://geni.us/ContactSwitch
■ Stationery Holder (x1): https://geni.us/StationeryHolder
■ Nuts and Bolts - : http://geni.us/NutsAndBolts
■ Wire: https://geni.us/22AWGWire
■ PLA Filament: https://geni.us/PLAFilament
■ Plastic Container (x1): https://geni.us/PlasticContainer ใบที่ผมใช้มีขนาดประมาณกว้าง 20 ซม. ยาว 20 ซม. และสูง 27 ซม.
นี่คือเครื่องมือบางส่วนที่ผมชอบใช้และขอแนะนำ:
■ Battery powered glue gun: http://geni.us/BoschBatteryGlueGun
■ Bosch Bit Driver: https://geni.us/Bosch-Screwdriver
คุณจะต้องมี 3D printer สำหรับพิมพ์ชิ้นส่วนต่างๆ อย่างไรก็ตาม หากคุณมีความชำนาญในงานไม้หรืองานโลหะ คุณอาจจะสร้างชิ้นส่วนขึ้นมาเองแทนการพิมพ์ 3D ก็ได้
นอกจากนี้คุณต้องเตรียม dry ice เมื่อสร้างโปรเจกต์เสร็จแล้ว คำเตือนสั้นๆ:
Dry ice มีความเย็นจัดและจะลวกผิวหนังของคุณหากสัมผัสโดยตรง โปรดปฏิบัติตามคำแนะนำด้านความปลอดภัยทั้งหมดที่ได้รับจากผู้จำหน่าย dry ice แล้วคุณจะสนุกกับมันได้อย่างเต็มที่โดยไม่ต้องพาสมาชิกในทีมไปห้องฉุกเฉิน
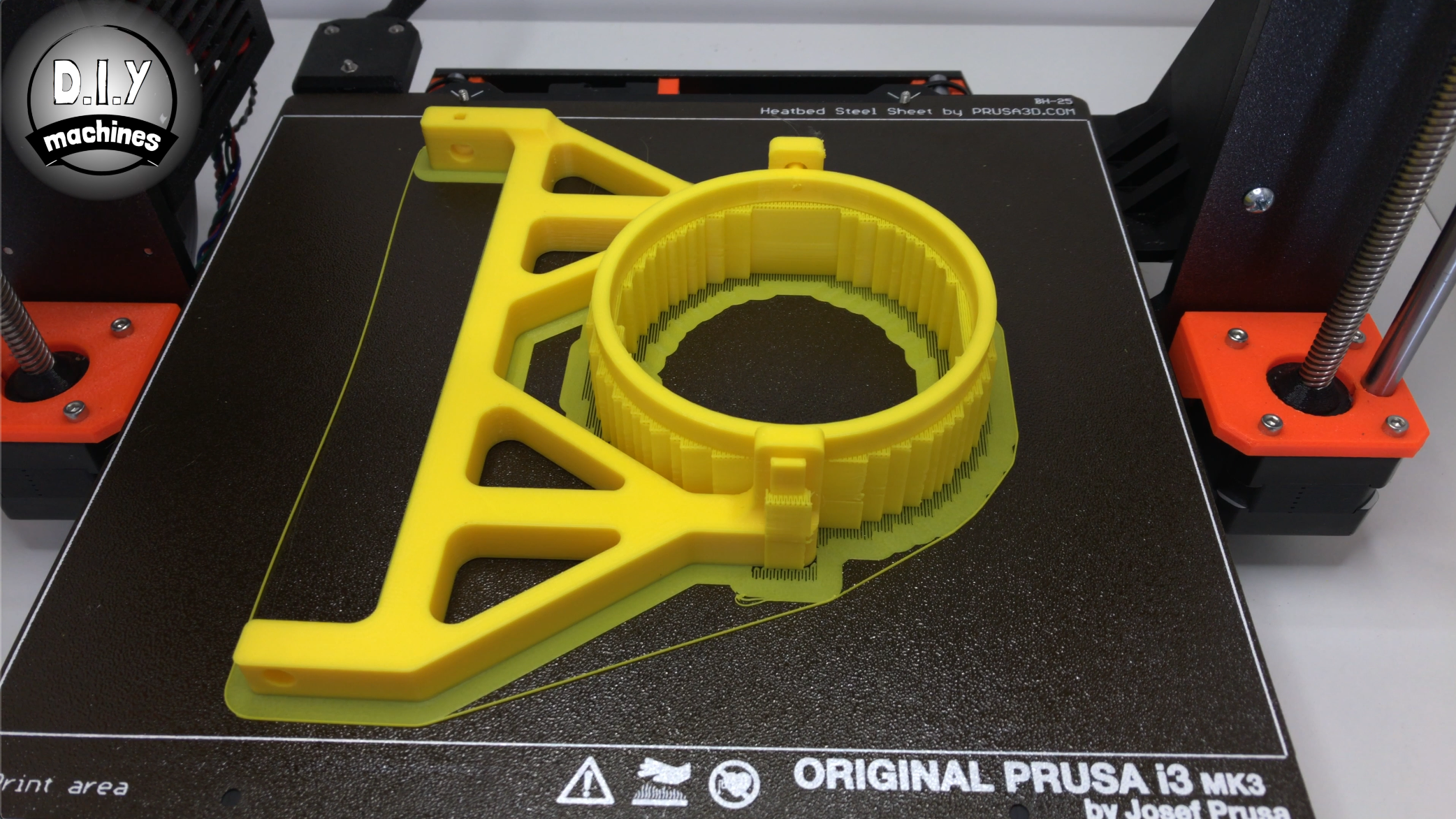
คุณต้องพิมพ์ชิ้นส่วนหลายชิ้นสำหรับโปรเจกต์นี้ ซึ่งสามารถดาวน์โหลดได้ที่หน้า Thingiverse ของผม: https://www.thingiverse.com/thing:3902329/files
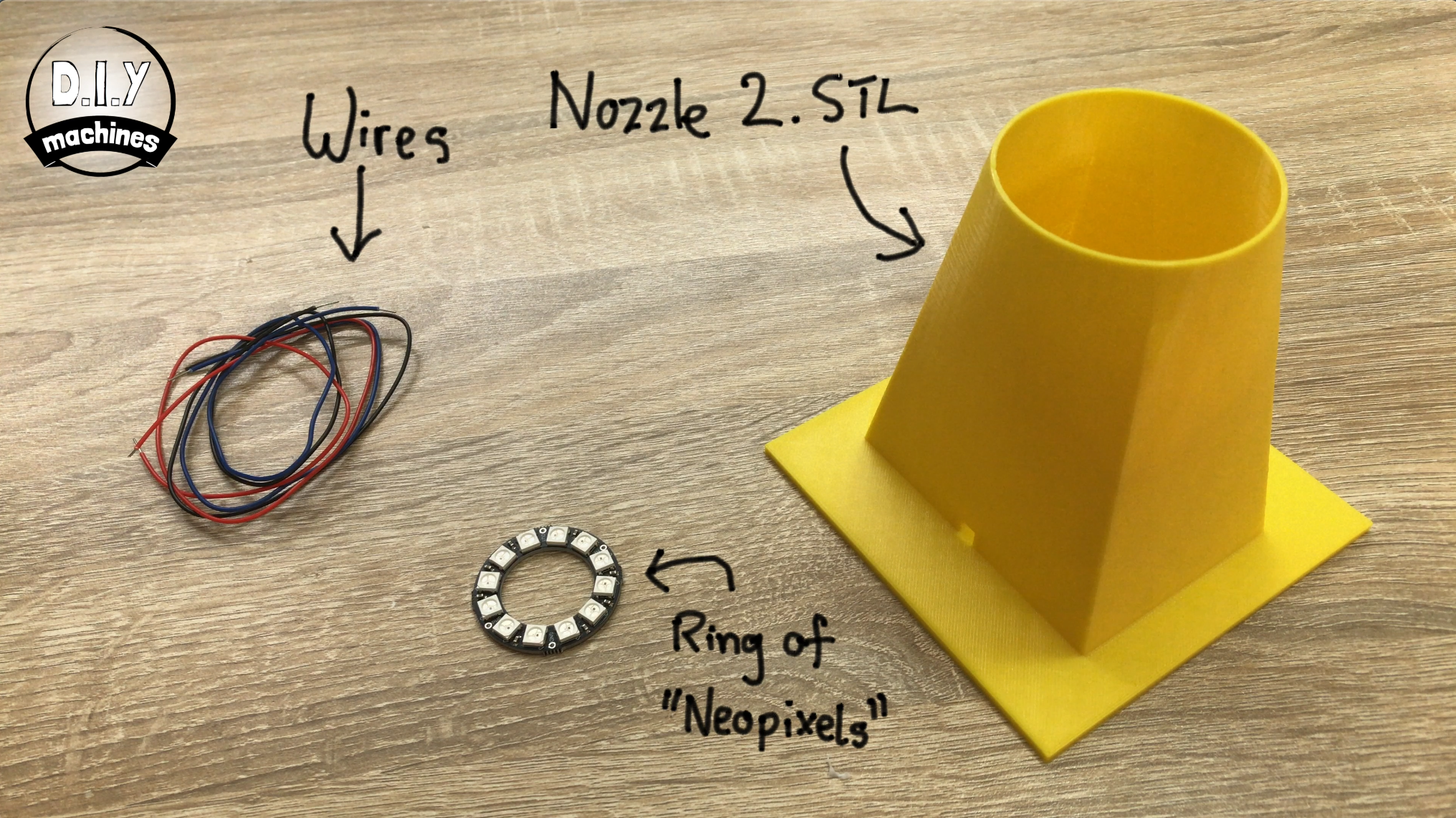
ชิ้นส่วนที่ต้องพิมพ์คือ:
เราจะพูดถึงการพิมพ์ Nozzle ในภายหลังในคู่มือนี้เมื่อถึงขั้นตอนการประกอบ
เมื่อคุณพิมพ์ Dry Ice Arms เสร็จแล้ว ให้ใช้เวลาสักครู่ค่อยๆ แกะวัสดุ support ออกอย่างระมัดระวัง
สำหรับขั้นตอนนี้ให้เตรียม:

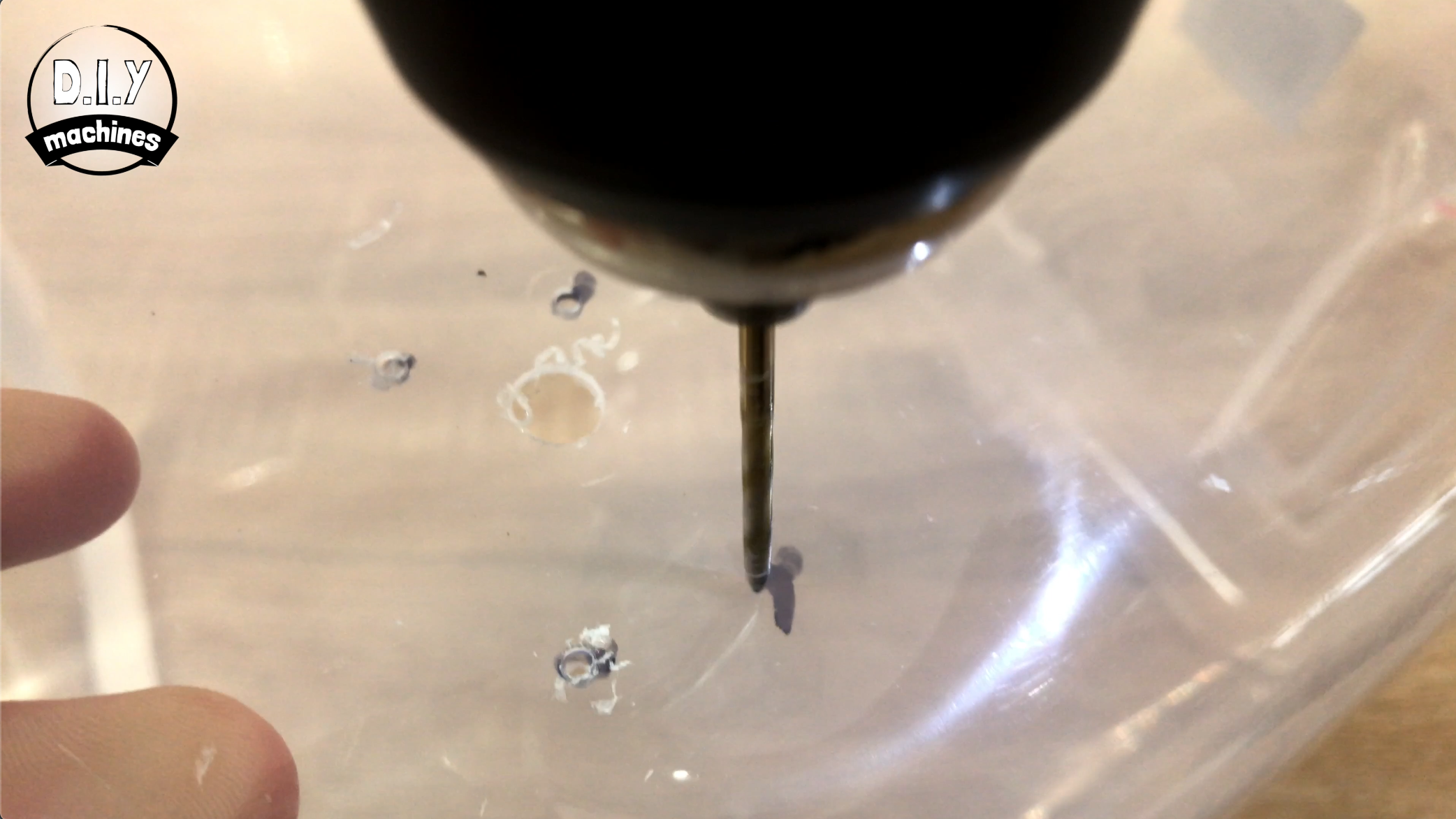

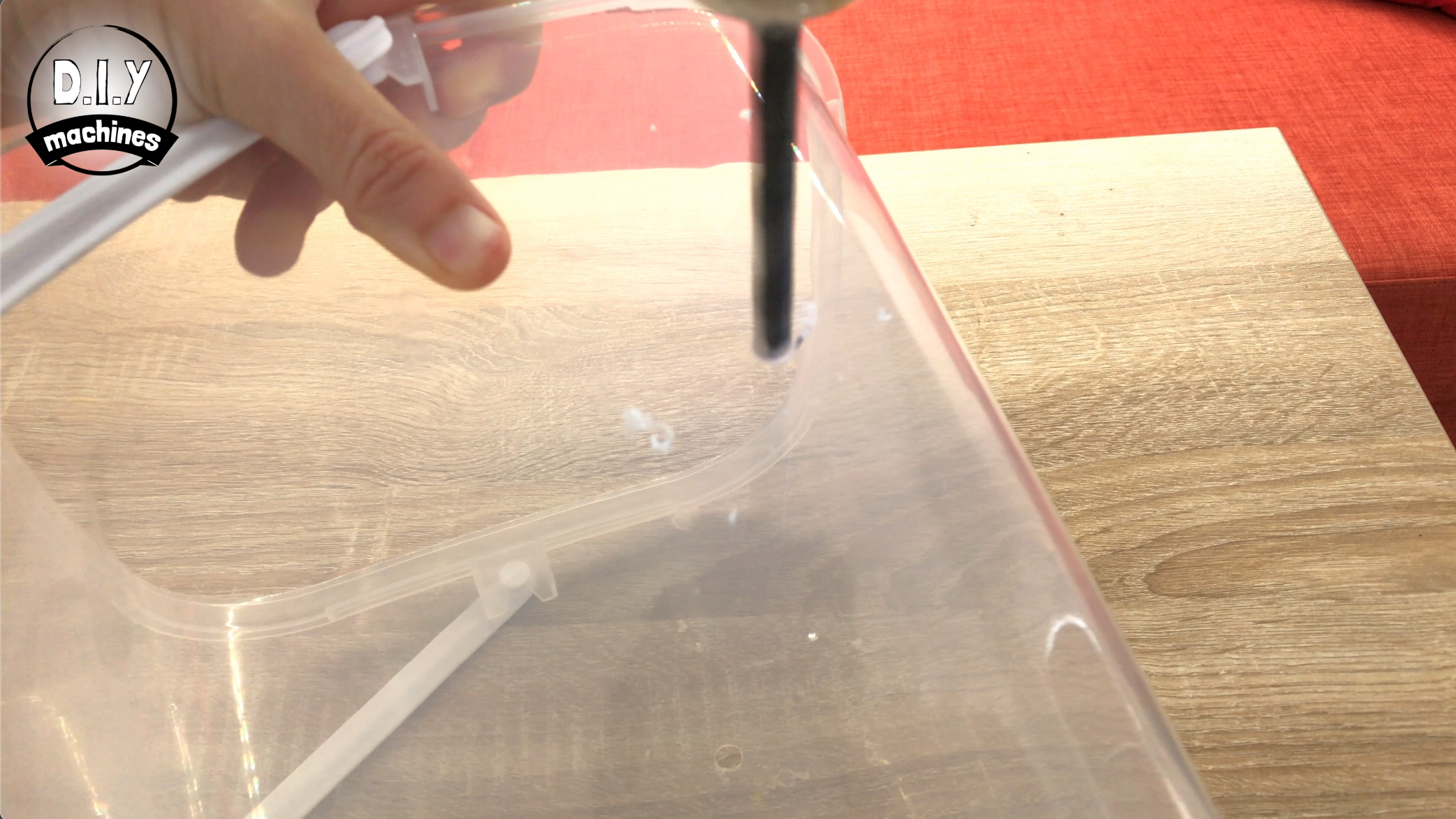
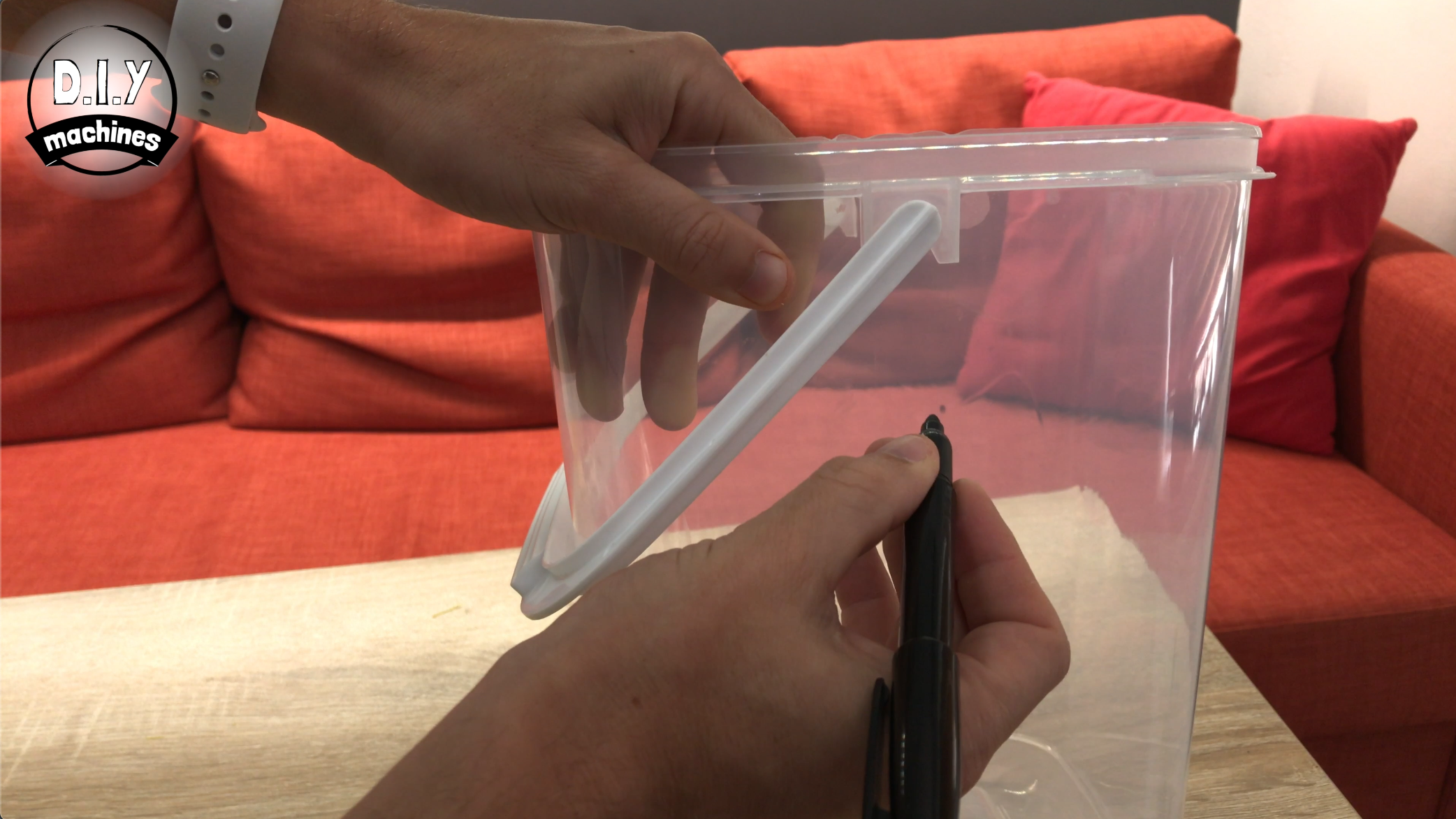

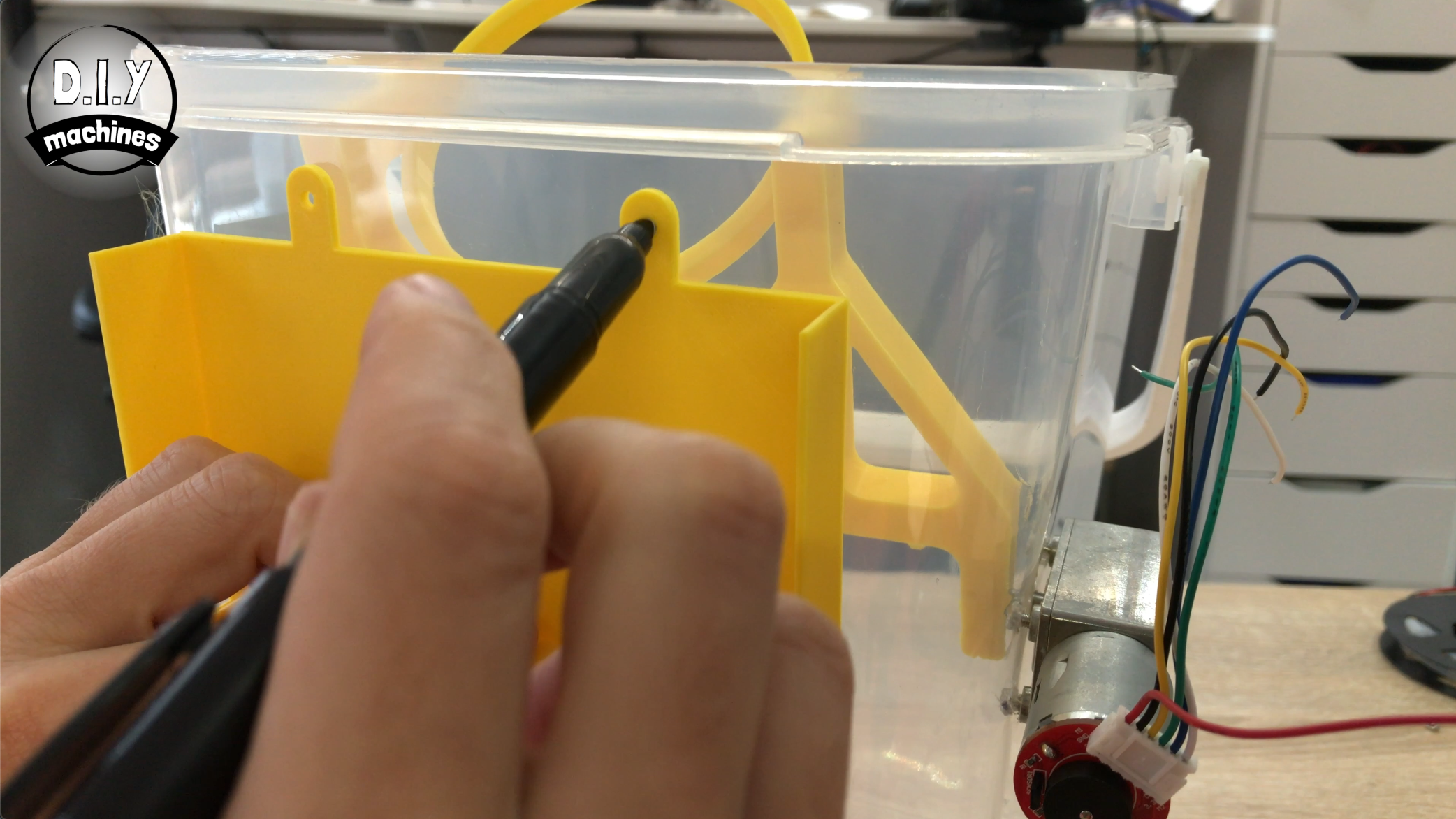
ใส่ที่ใส่เครื่องเขียน/กระบอกใส่ปากกาลงในแขน (arms) ที่เราเพิ่งพิมพ์ออกมา หย่อนมันลงไปใน Container ของคุณ จากนั้นมาร์กตำแหน่งด้านข้างที่เราต้องเจาะรูเพื่อให้แขนสามารถเคลื่อนที่ขึ้นลงได้โดยไม่ชนกับส่วนที่เหลือของ Container และมาร์กอีกจุดหนึ่งที่ฝั่งตรงข้ามของ Container
เจาะรูตามตำแหน่งที่มาร์กไว้ทั้งสองจุดด้วยดอกสว่านขนาด 8mm
ทาบ Motor เข้ากับด้านหนึ่งของ Container แล้ววาดตำแหน่งรูสกรูเพื่อยึด Motor เจาะตามมาร์กทั้งสี่จุดอีกครั้ง แต่คราวนี้ให้ใช้ดอกสว่านขนาด 3mm
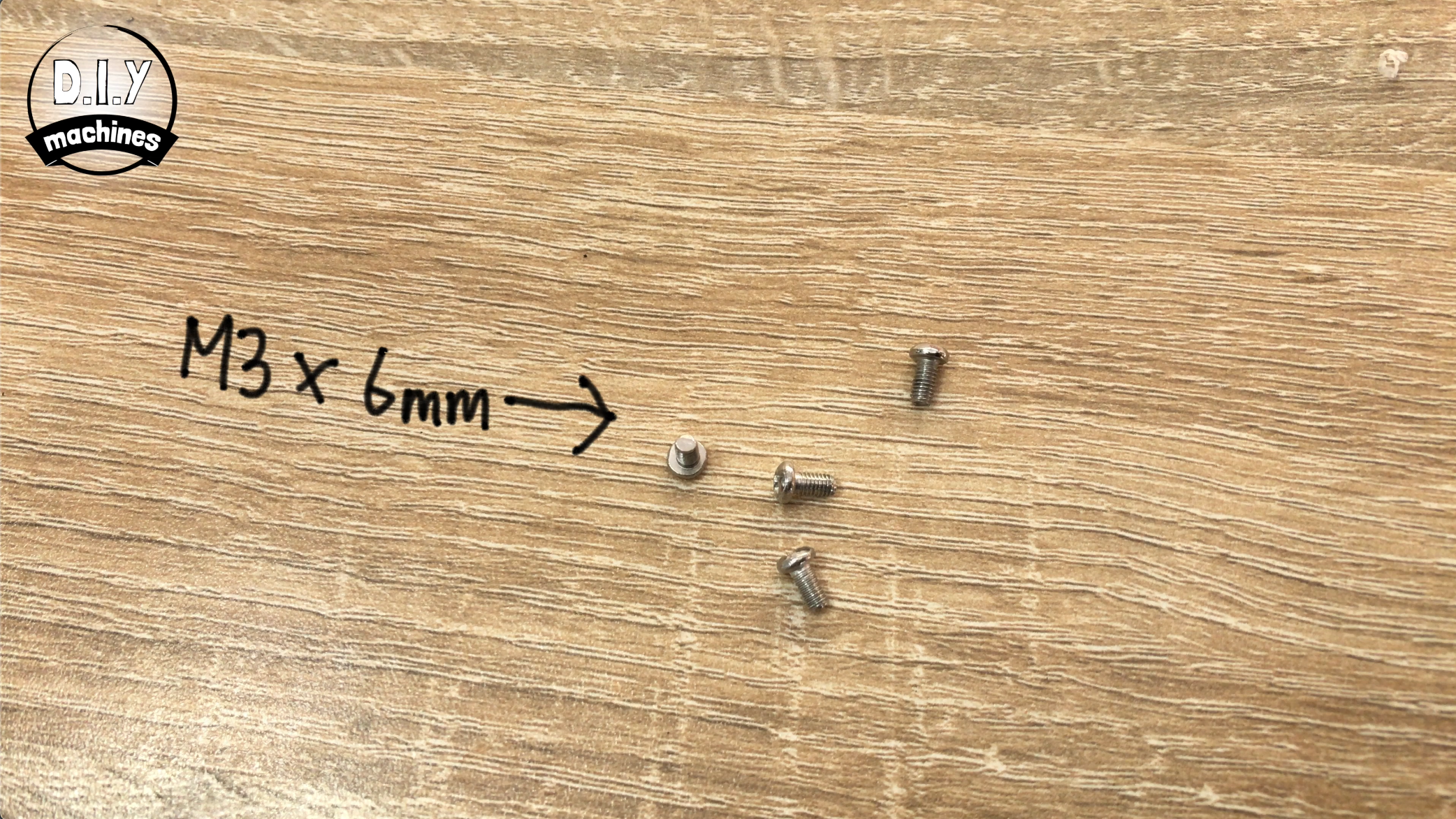
ใช้น็อต M3 x 6 สี่ตัวเพื่อยึด Motor ให้เข้าที่
สำหรับขั้นตอนนี้ให้เตรียม:


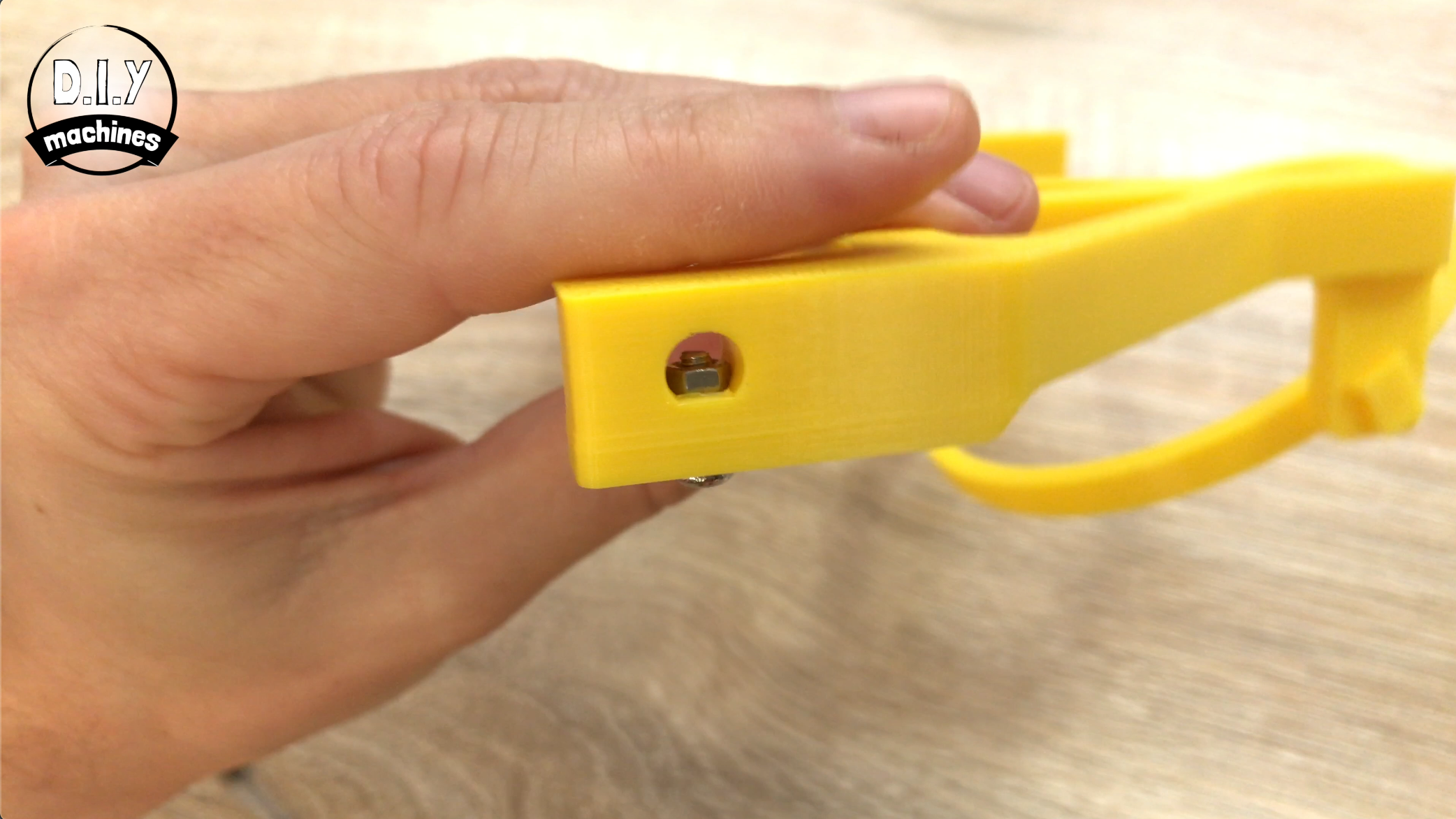
ใช้ประแจหกเหลี่ยมขนาดเล็กหรืออุปกรณ์ที่คล้ายกัน ใส่ M3 nut ลงในช่องยึดที่อยู่ด้านในรูที่ปลายข้างหนึ่งของแขน จากนั้นใส่ M3 x 6 bolt ผ่านรูที่ขนานกัน ขันน็อตจนกระทั่งมันดึงตัวเมียเข้าไปในร่องอย่างแน่นหนา จากนั้นคลายน็อตออกมาอีกครั้ง - ไม่ต้องถอยออกมาทั้งหมด แค่พอให้ไม่เห็นเกลียวของมันโผล่ออกมาในช่องรูปทรงนั้น
เมื่อเสร็จแล้ว คุณสามารถเลื่อนมันเข้าไปในเพลาของ Motor ตรวจสอบให้แน่ใจว่าได้วางตำแหน่งส่วนแบนของเพลา Motor ให้ตรงกับตำแหน่งของ Nut และ Bolt ของเรา ขัน Bolt ให้แน่นพอประมาณกับส่วนแบนของเพลา โดยระวังอย่าขันแน่นเกินไปจนทำให้ชิ้นส่วน 3D print เสียหาย
สำหรับขั้นตอนนี้ให้เตรียม:



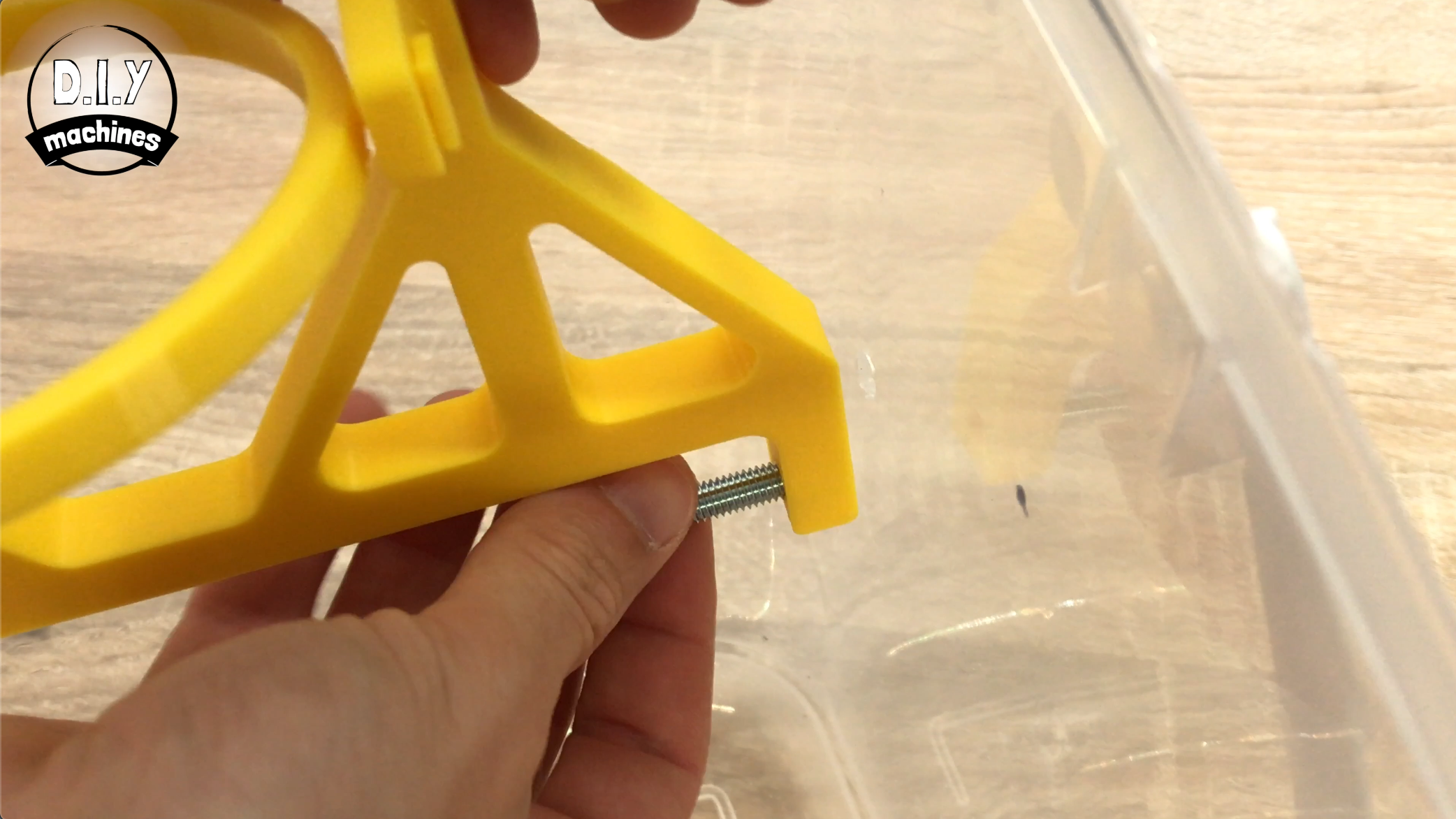
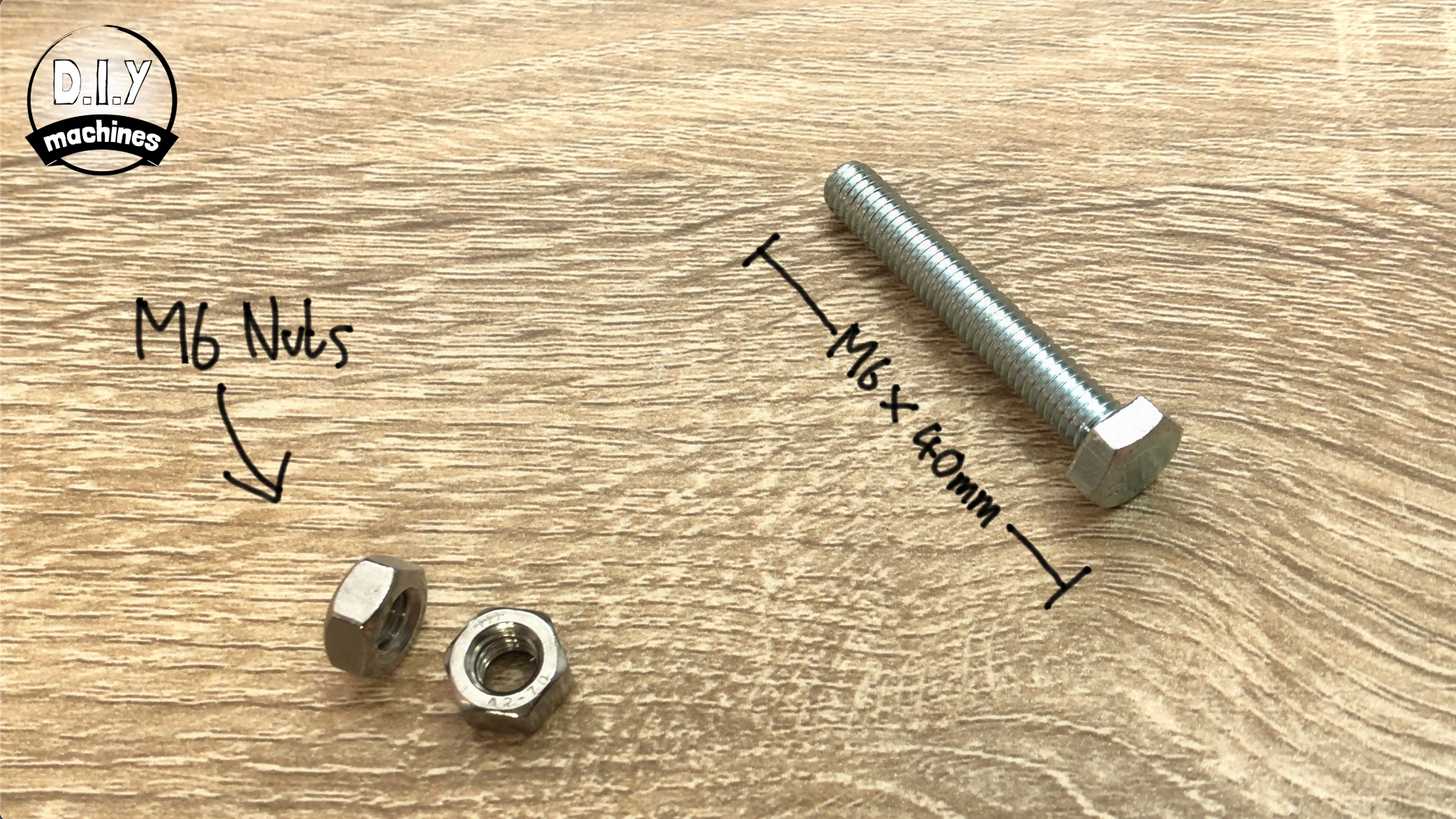
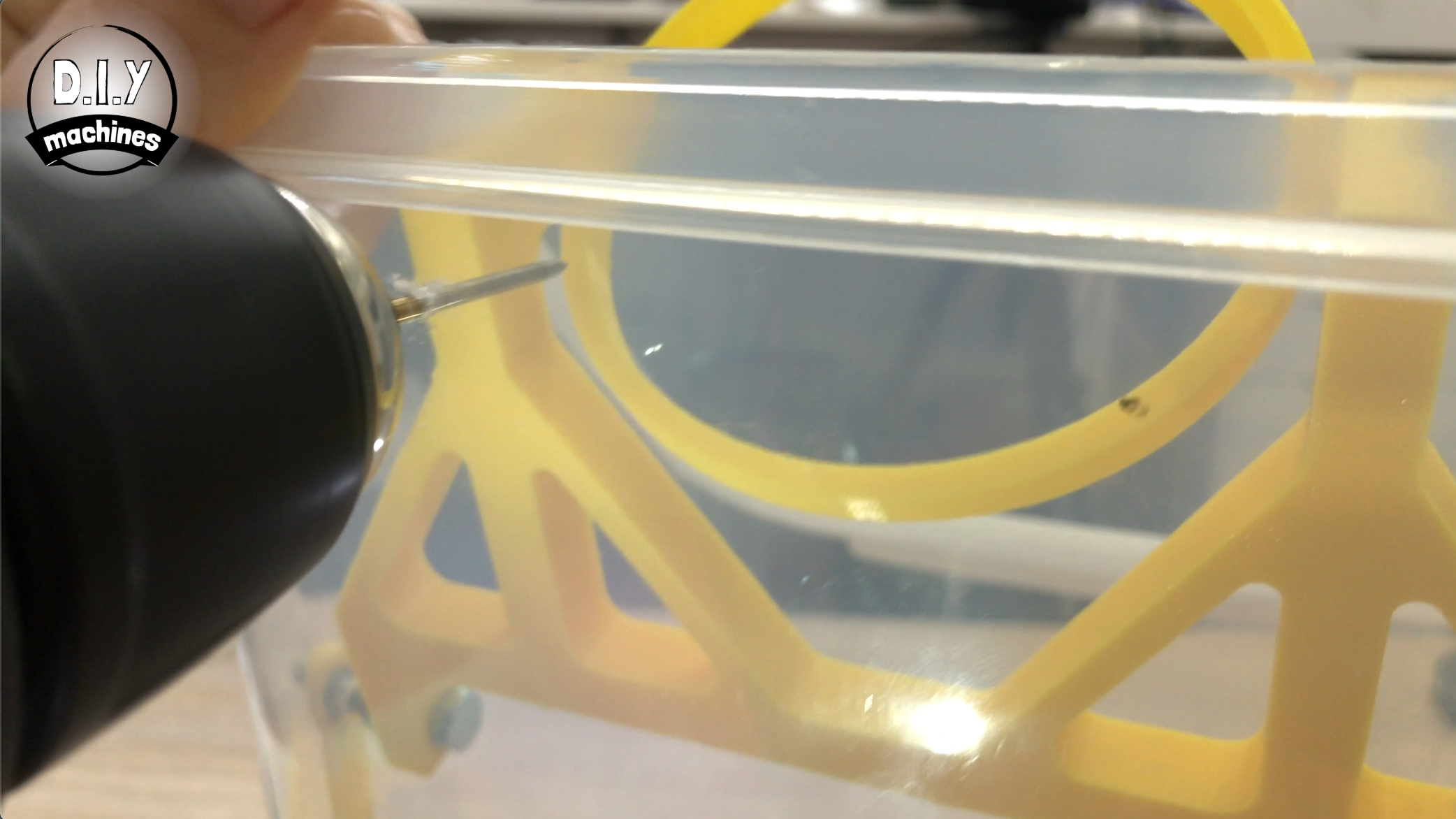
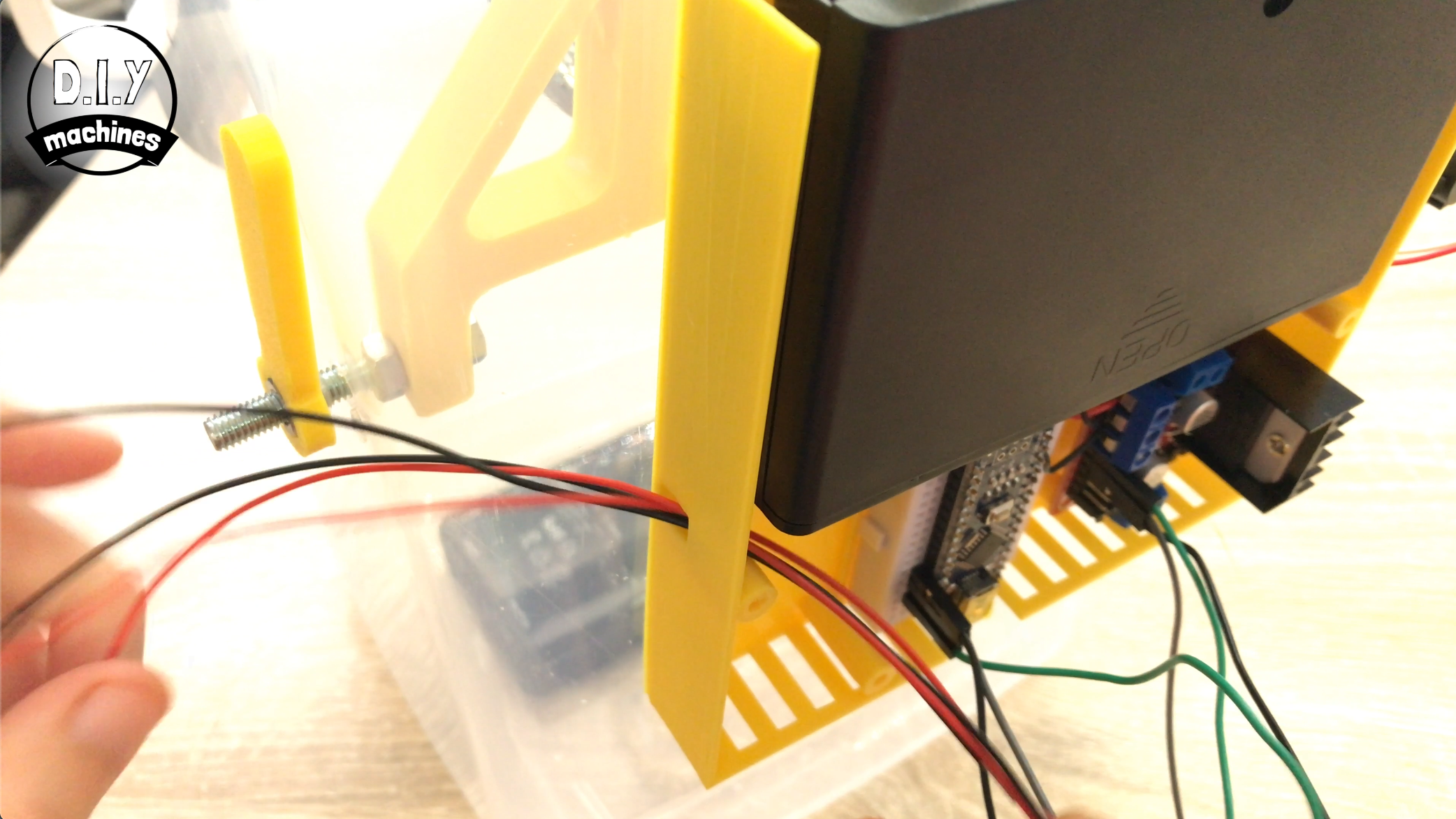
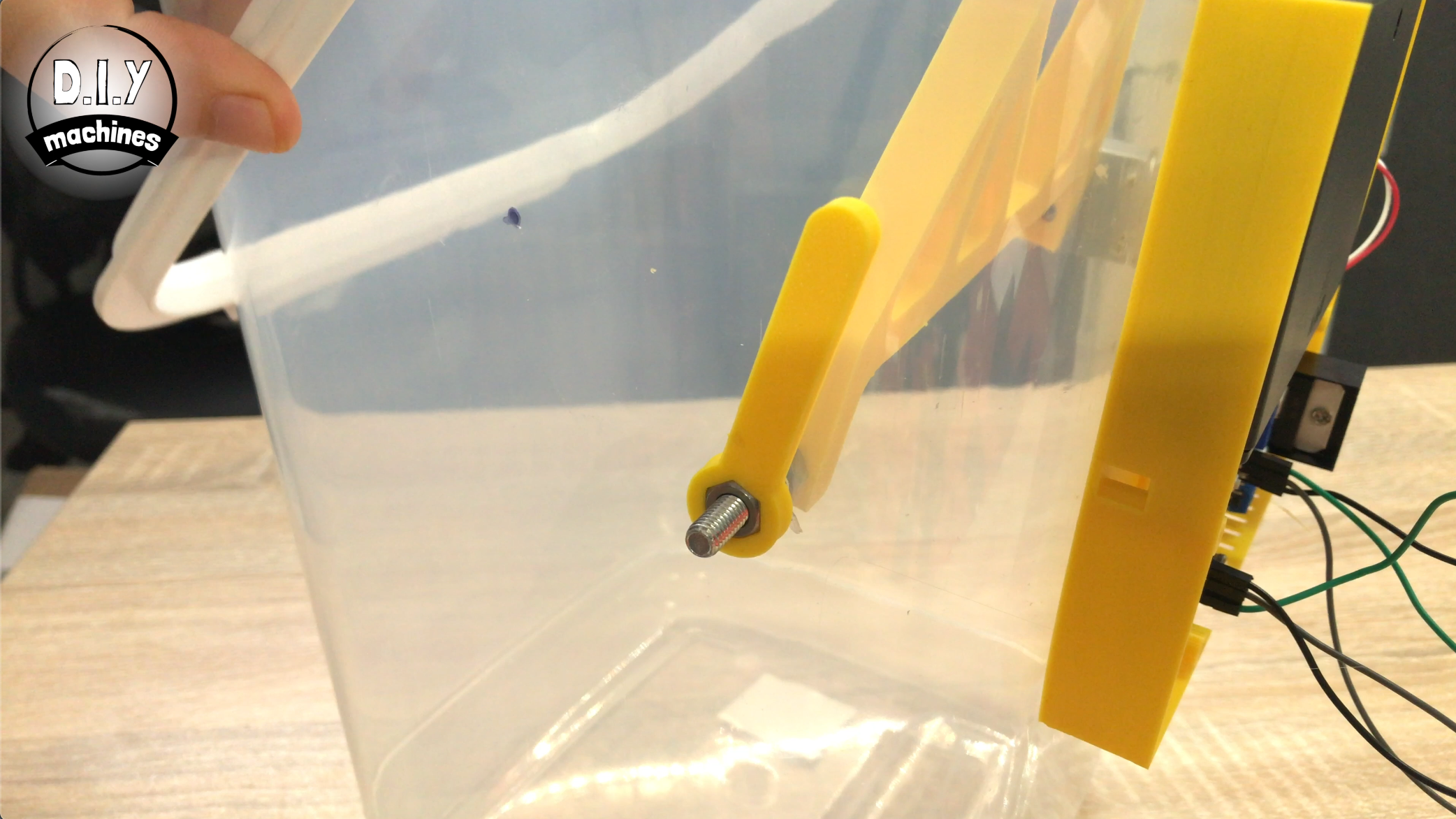
หยิบ M6 bolt ตัวยาวมาแล้วขันผ่านจากด้านในของแขนตะกร้าจนเกลียวโผล่ออกมาด้านนอก จากนั้นใส่ M6 nut เข้าไปหนึ่งตัวก่อนจะขันต่อผ่านชิ้นงาน 3D print และน็อตตัวนี้จนกระทั่งมันทะลุผ่านชิ้นงานไปจนสุดและโผล่ออกมานอก Container พลาสติกหลัก (ตรวจสอบรูปภาพด้านบนหากคุณไม่แน่ใจในสิ่งที่ผมกำลังอธิบาย)
ตอนนี้เราสามารถหยิบ 'limit lever' ที่พิมพ์จาก 3D printer มาและยึด M6 nut ที่เหลือไว้ข้างใน ในตอนนี้คุณสามารถขันมันเข้าที่ปลายของ M6 bolt ตรงที่โผล่ออกมาจาก Container ได้เลย เราจะจัดการส่วนนี้ต่อในภายหลัง
สำหรับขั้นตอนนี้คุณต้องมี:
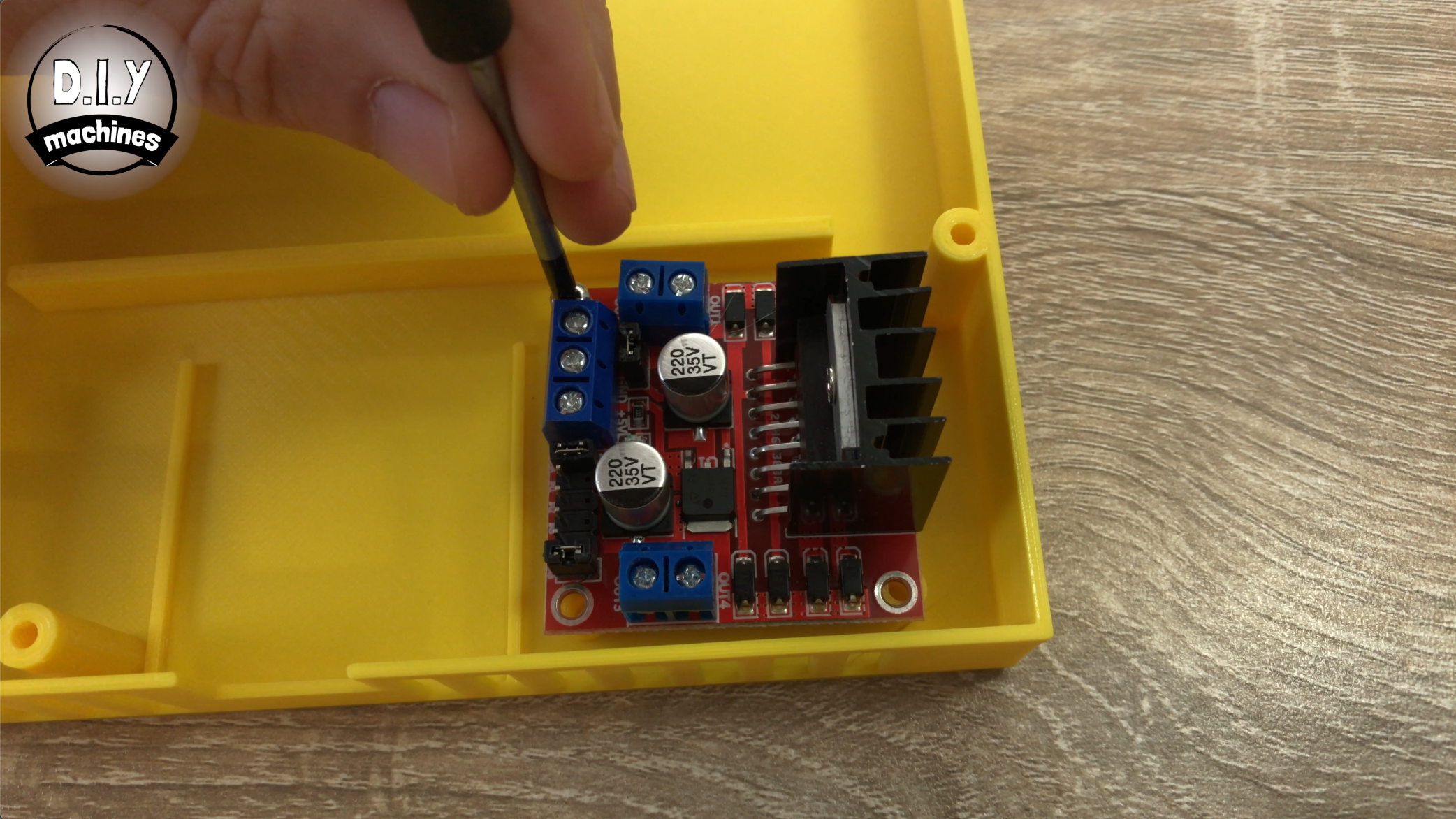
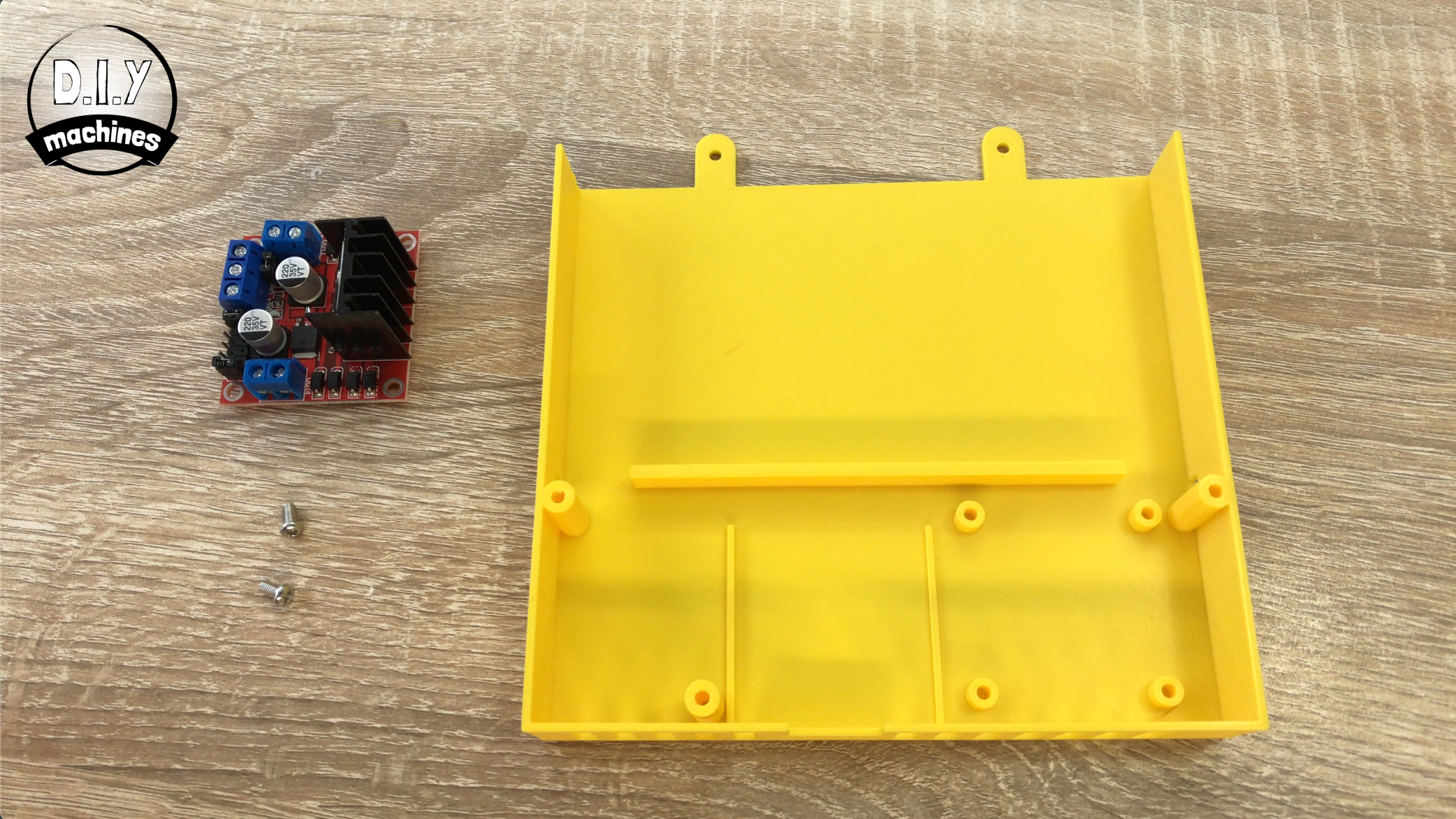
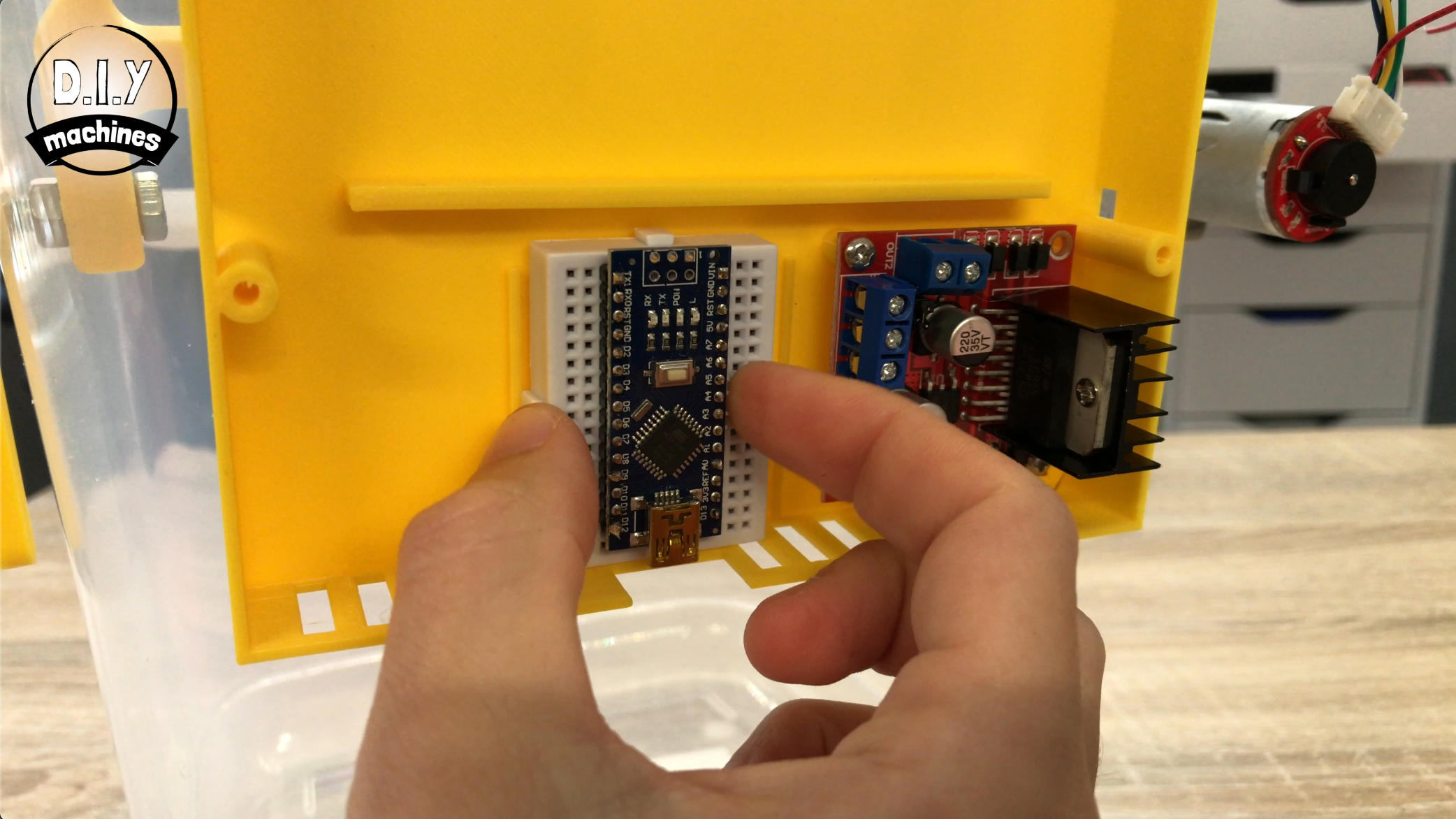
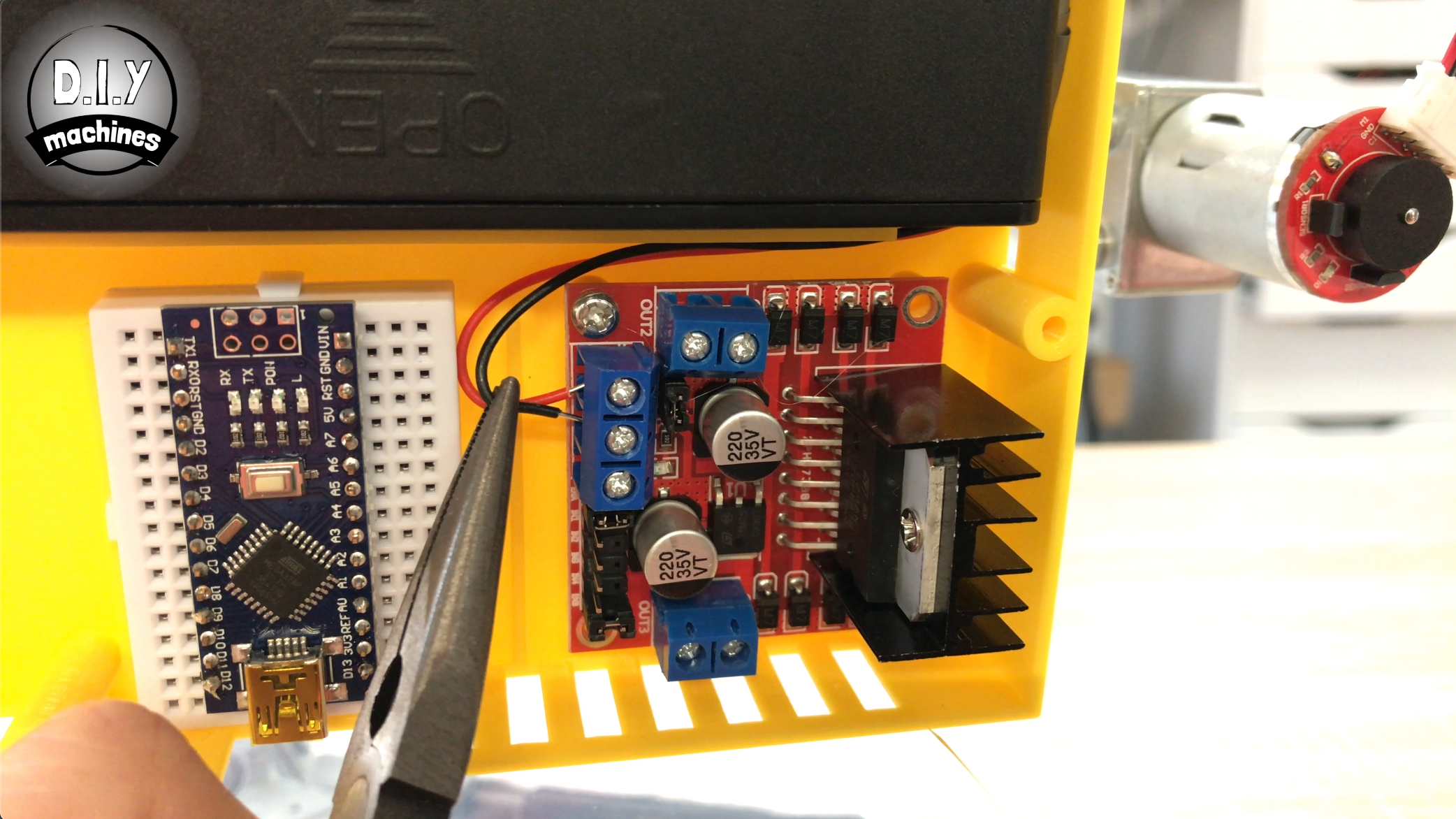
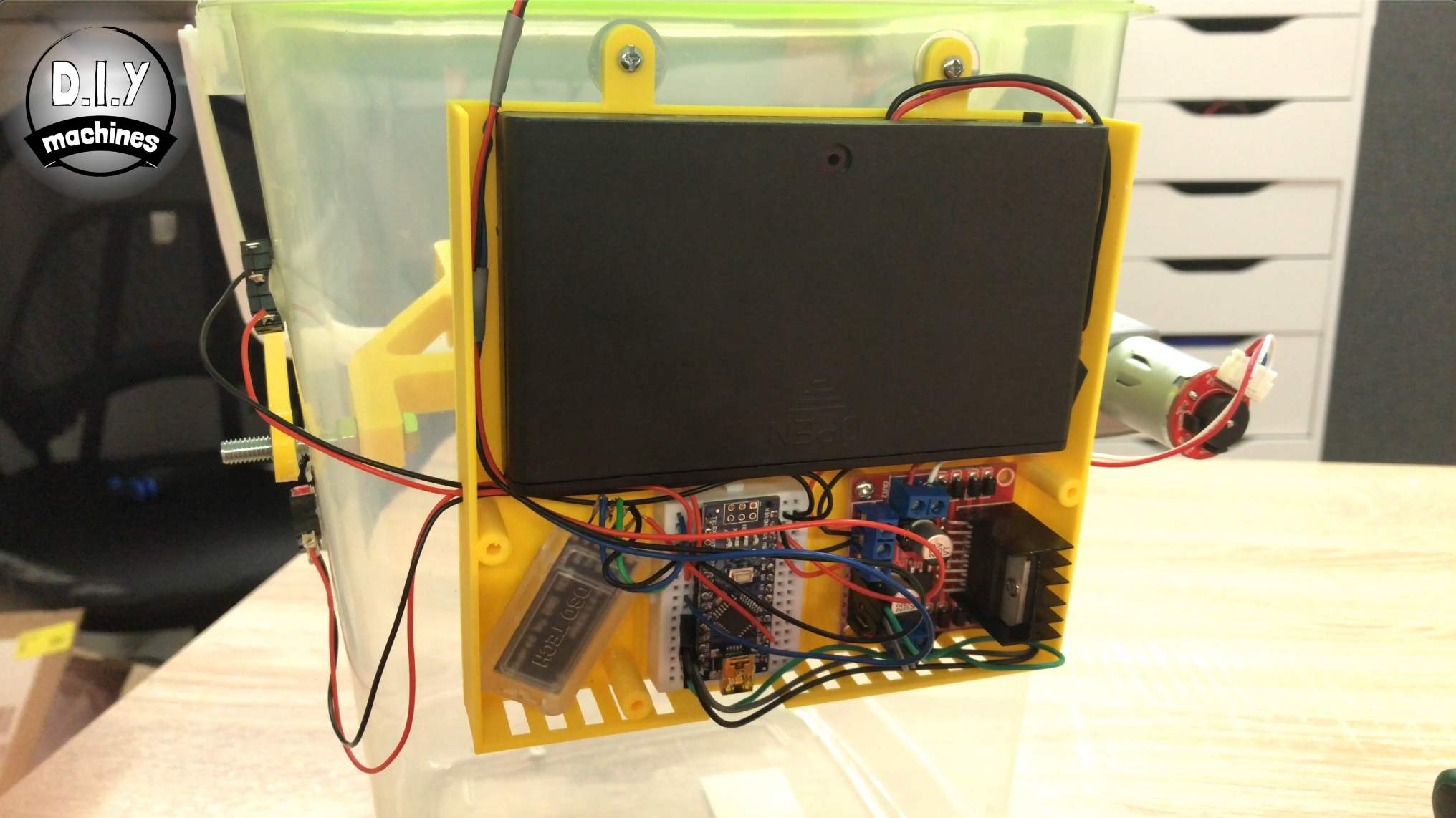
วาง Motor Driver Board ลงบนเสารองรับ (stand offs) ทั้งสี่อันที่ยกระดับขึ้นมาตรงมุมขวาล่างของ Electronics Housing แล้วยึดด้วยน็อตอย่างน้อยสองตัวโดยใช้รูที่มุมทั้งสี่ หากคุณวางทิศทางตามแบบของผมในรูปภาพ จะทำให้ทำตามคู่มือนี้ได้ง่ายขึ้น นอกจากนี้ทิศทางการวางยังสำคัญเพราะฝาปิดถูกออกแบบมาให้รองรับ Motor Driver ในทิศทางนี้เท่านั้น
สำหรับขั้นตอนนี้ให้เตรียม:

ทาบ Electronics Housing (ส่วนที่เราเพิ่งใส่ Motor Driver เข้าไป) เข้ากับด้านหลังของ Container ใกล้กับส่วนบน ใช้ปากกามาร์กตำแหน่งที่เราต้องเจาะรูสองรูเพื่อยึดมันผ่านแถบหูยึดที่ด้านบน
เจาะรูตามตำแหน่งมาร์กทั้งสองจุดด้วยดอกสว่านขนาด 3mm
ใช้น็อต M3 x 6 สองตัว, M3 washer สองตัว และ M3 nut สองตัว เพื่อยึดชิ้นส่วนนี้เข้าที่โดยใช้รูที่เราเพิ่งเจาะไป
สำหรับขั้นตอนนี้คุณต้องมี:
https://diymachines.co.uk/projects/bluetooth-contr...
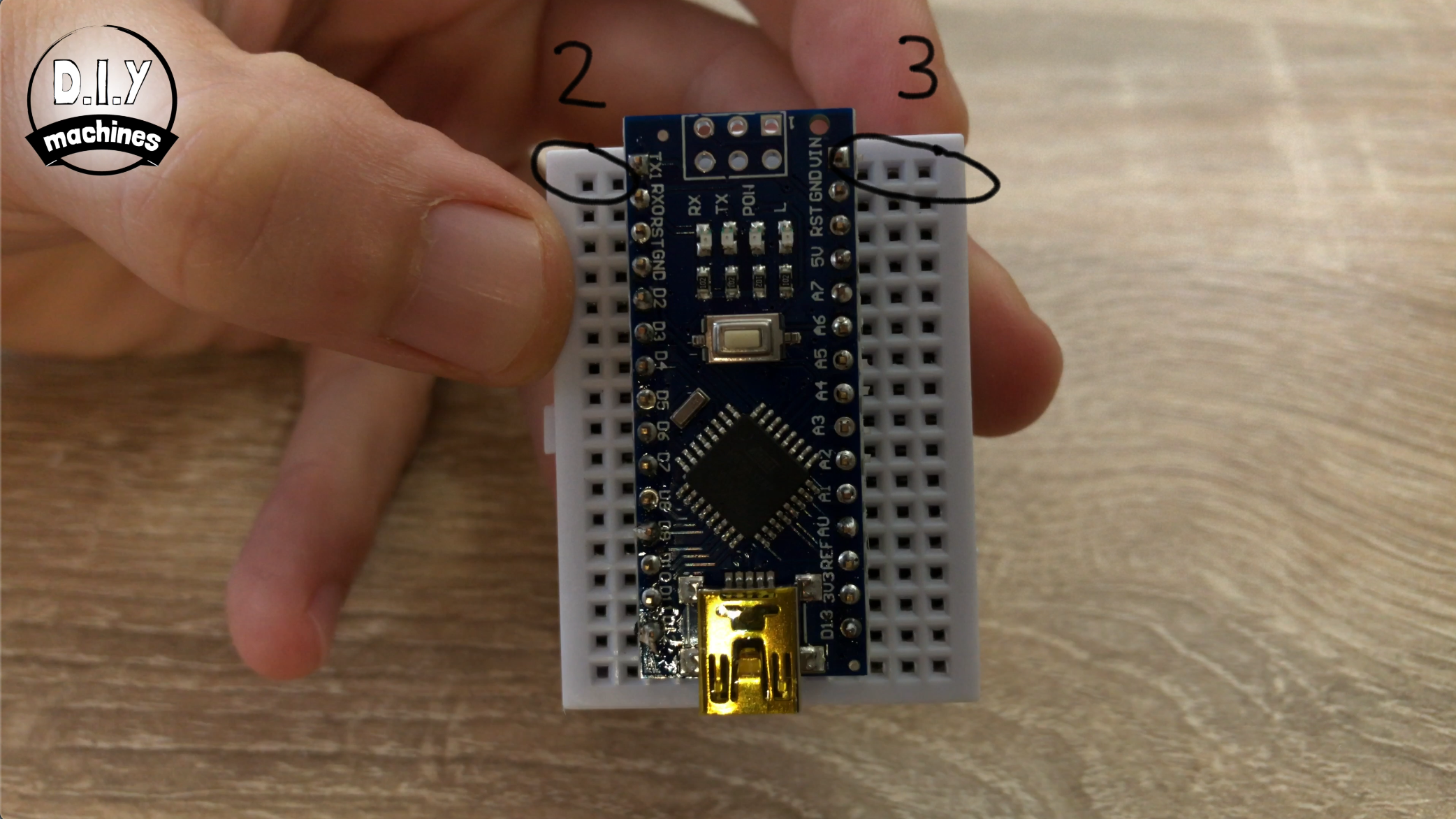
ติดตั้ง Arduino ลงบน Breadboard คุณอาจจะติดตั้งมันไว้ไม่กึ่งกลางนักซึ่งก็ไม่เป็นไร ให้จัดตำแหน่งโดยให้ด้านที่มีจุดเชื่อมต่อ 5V มีรูว่างเหลืออยู่บน Breadboard 3 รู และอีกด้านหนึ่งเหลือรูว่างอยู่ 2 รู
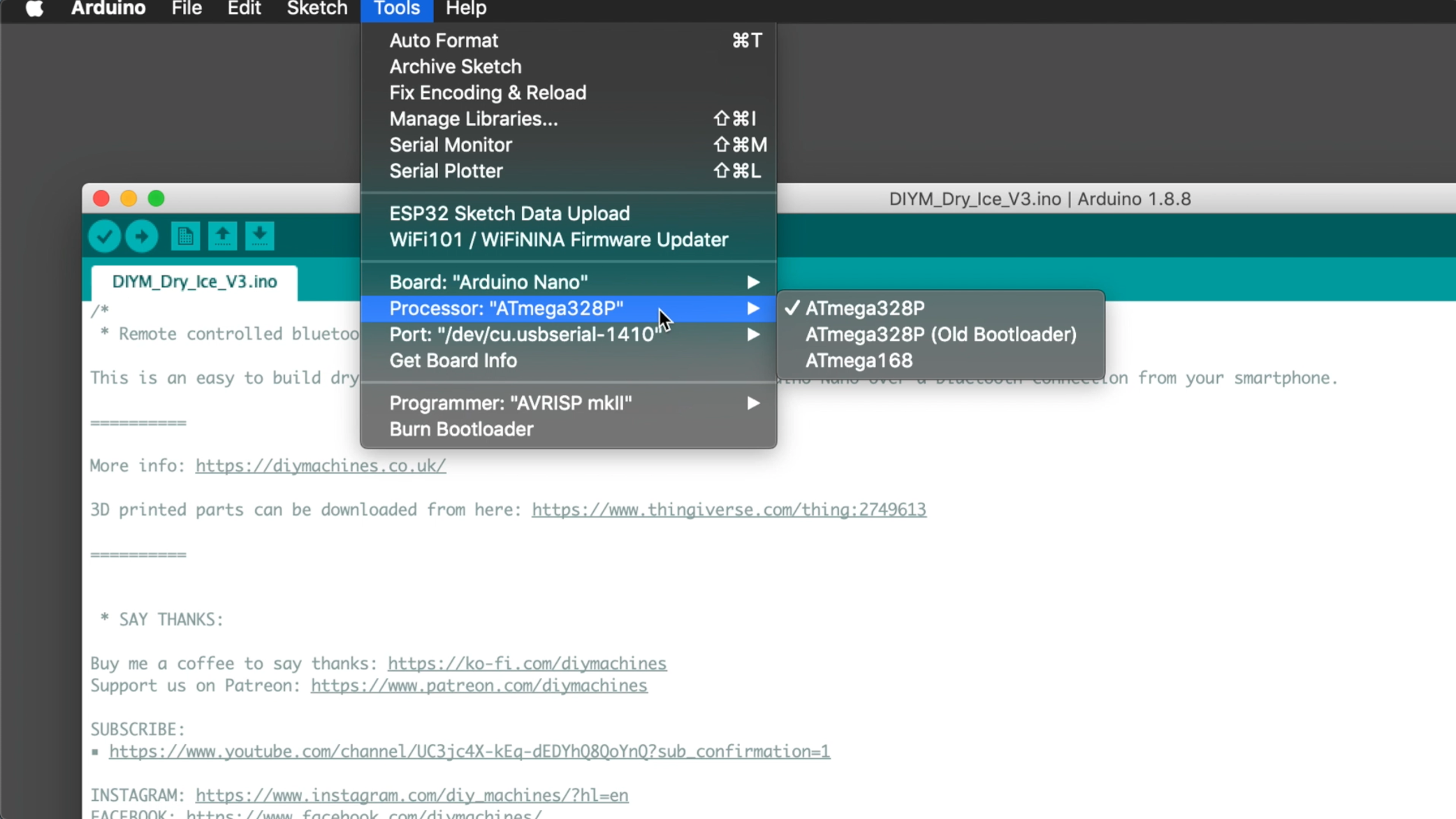
เปิด Code ของโปรเจกต์ใน Arduino IDE ตรวจสอบให้แน่ใจว่าคุณเลือก Board เป็น 'Arduino Nano', Processor เป็น 'ATmega328P' และตรวจสอบว่าเลือก Serial Connection ถูกต้อง
ตอนนี้คุณสามารถ Upload Code ลงใน Arduino Nano ได้แล้ว เมื่อเสร็จเรียบร้อย ให้ถอดสาย USB ออกจาก Arduino
ลอกแถบกาวด้านหลังออกแล้วกดมันลงในตำแหน่งกึ่งกลางที่ด้านล่างของ Electronics Housing
สำหรับขั้นตอนนี้ให้เตรียม:
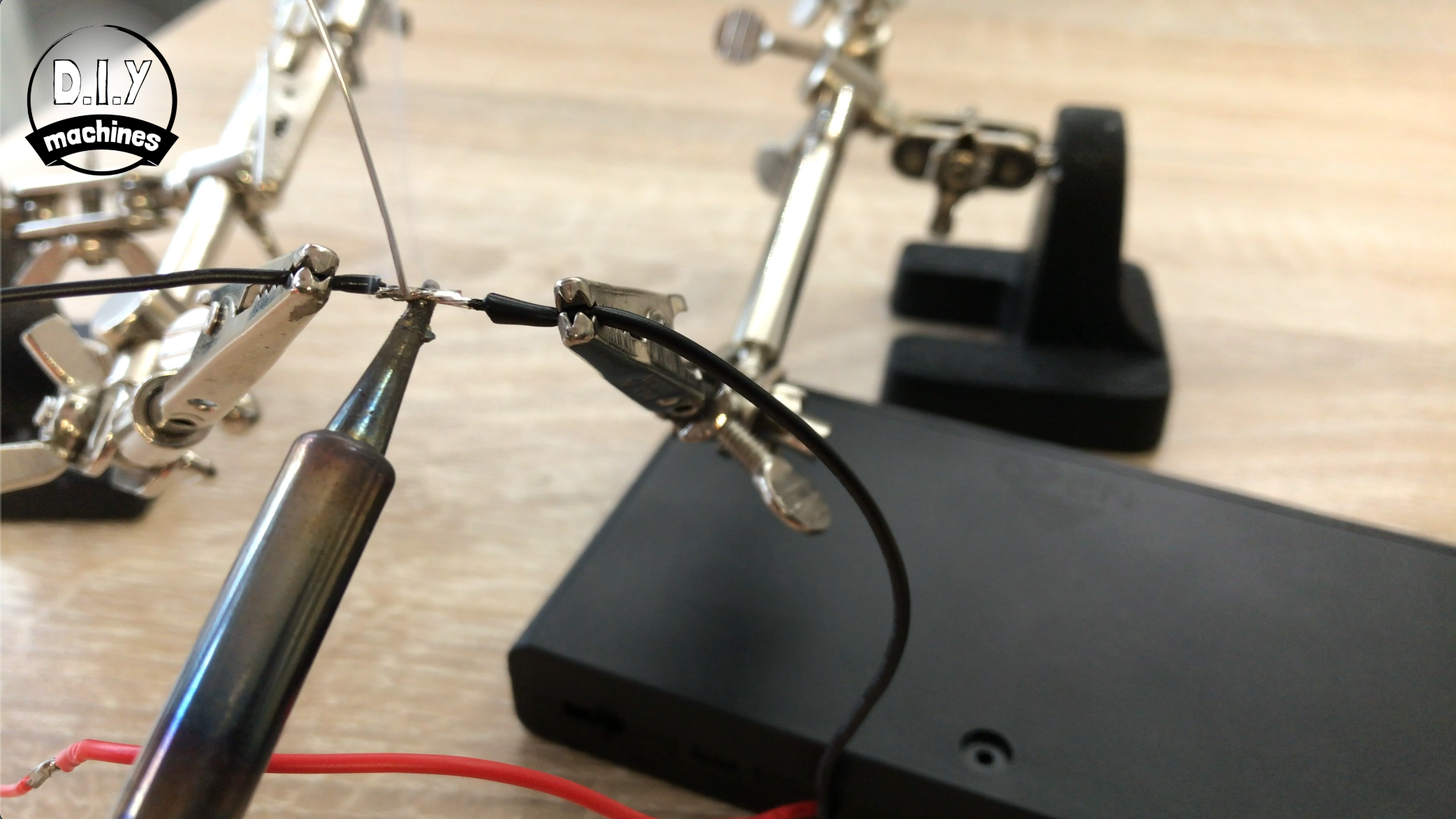

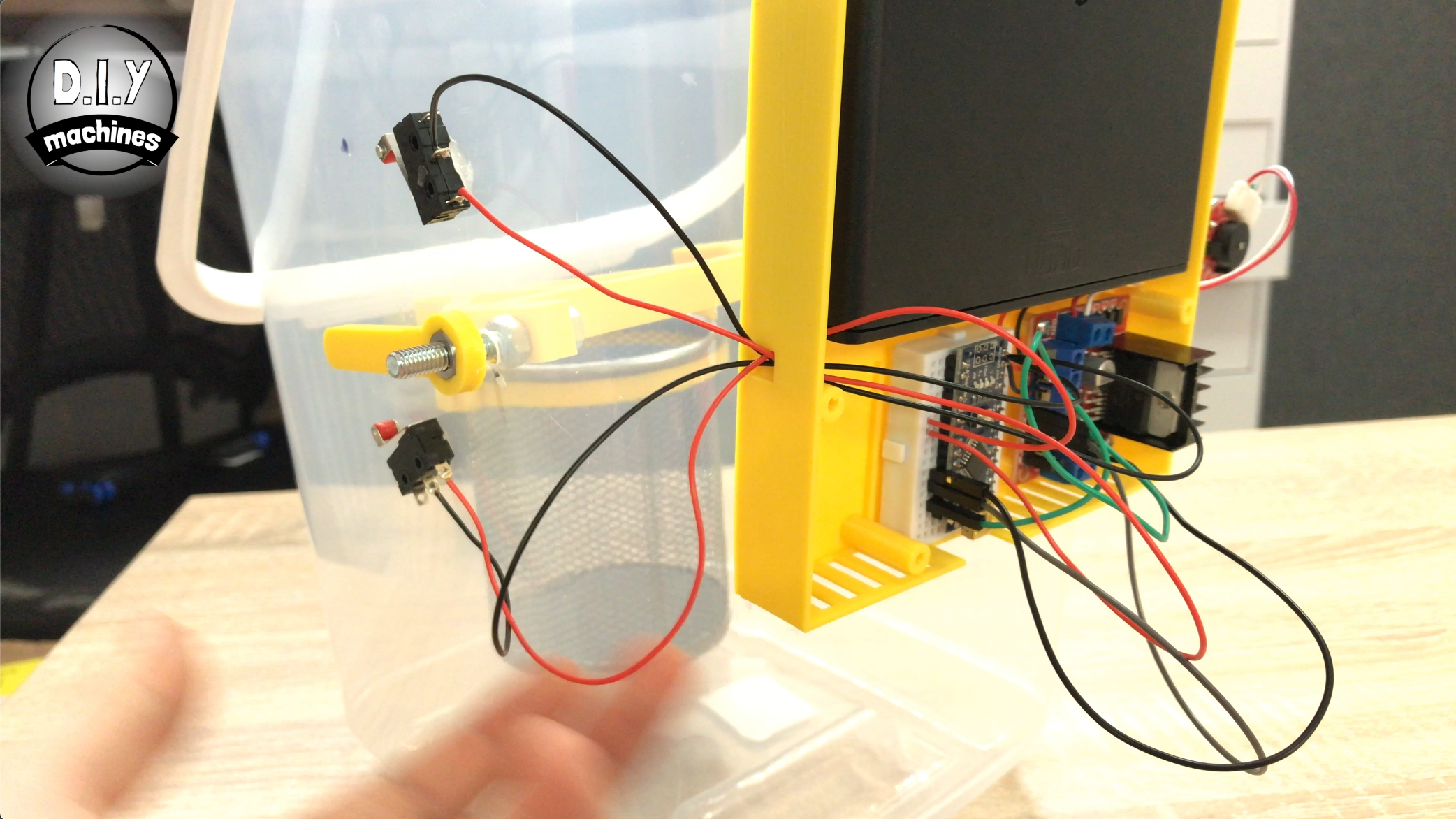
ก่อนที่เราจะเชื่อมต่อ Battery Holder เราต้องต่อสายไฟที่ออกมาจากมันให้ยาวขึ้นจนถึง Terminal ของ Motor Driver Board ตามที่แสดงในรูปแรกด้านบน คุณต้องตรวจสอบดูว่าต้องใช้สายไฟเพิ่มขึ้นเท่าไหร่ (ถ้ามี) ของผมต่อเพิ่มไปประมาณ 7 ซม.
เมื่อเสร็จแล้วให้ใส่แบตเตอรี่ AA ลงใน Holder และพันเทปฉนวนตรงจุดบัดกรีที่ต่อสายไฟเพิ่ม เพราะเราไม่ต้องการให้วงจรลัดวงจร
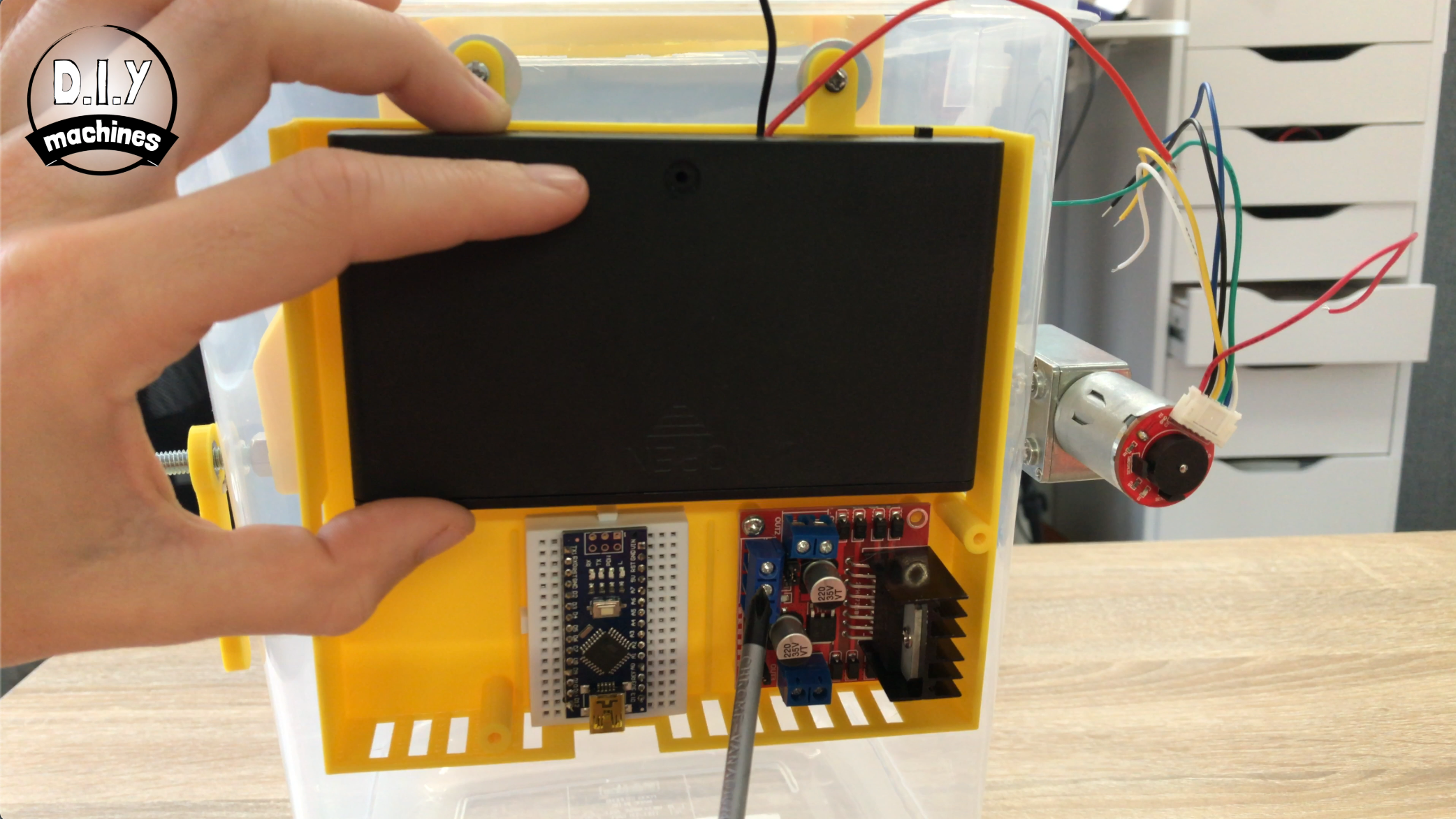
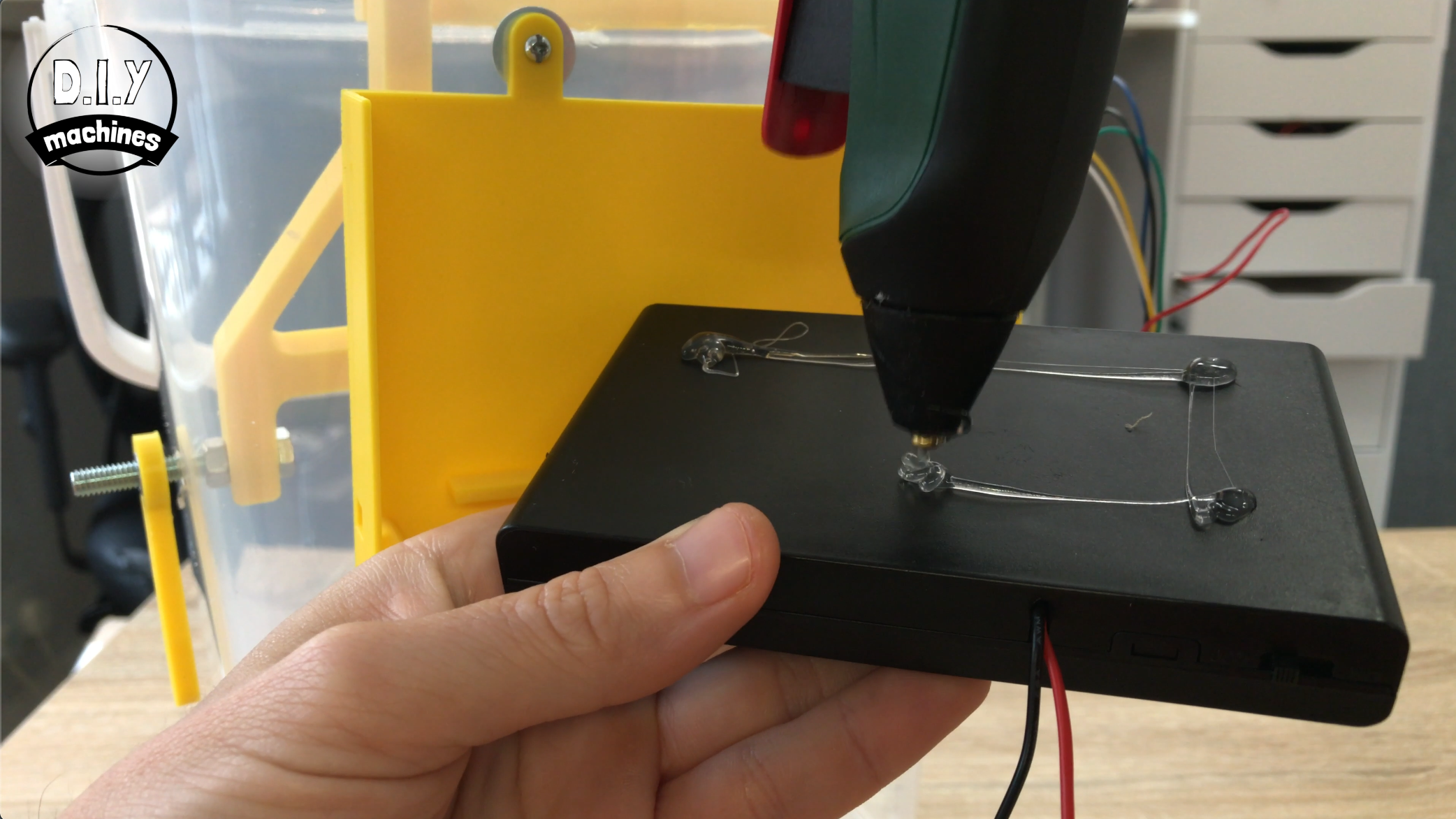
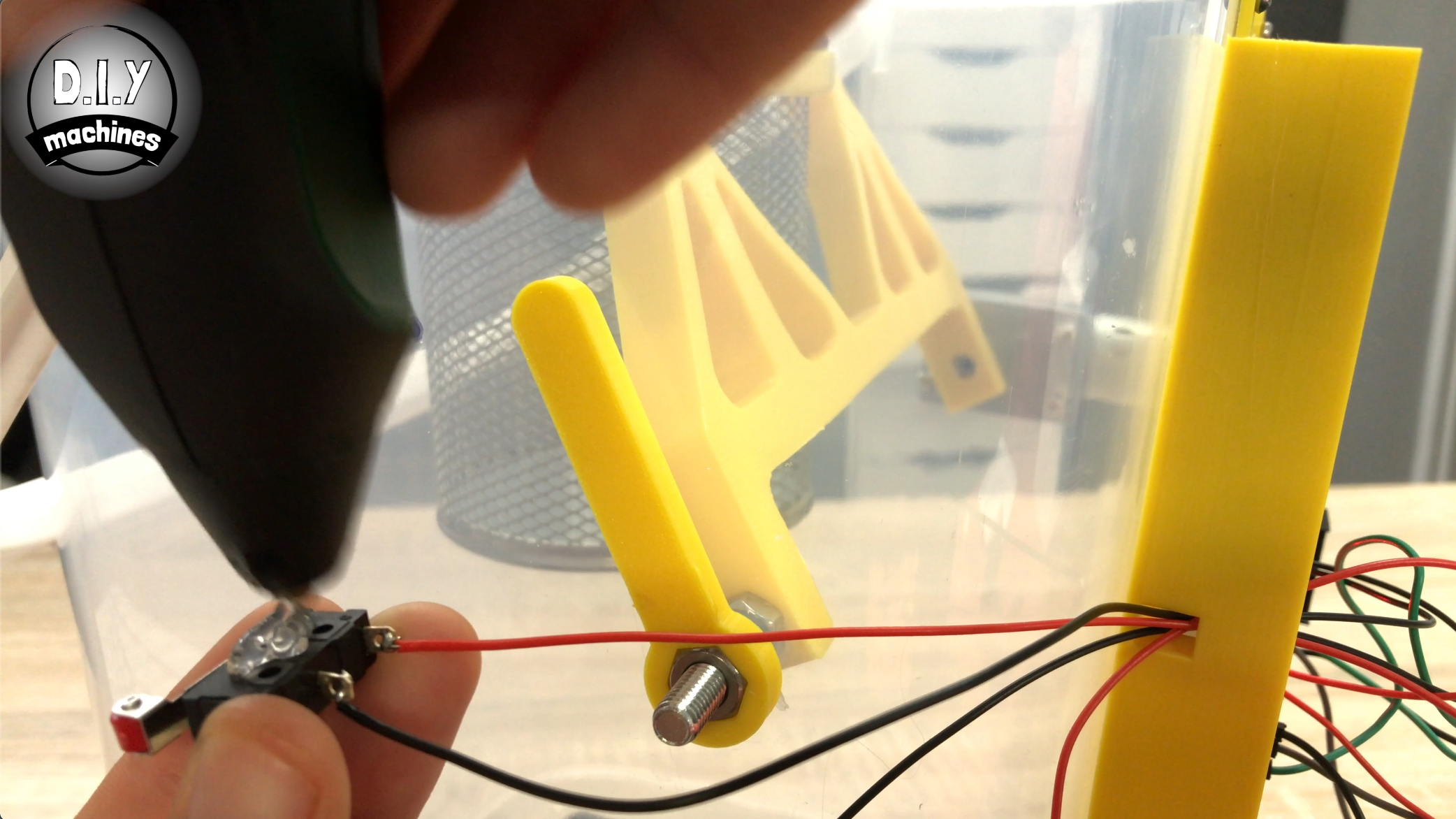
ใช้ปืนกาวร้อนหรือวัสดุที่คล้ายกันติด Battery Holder เข้ากับ Electronics Holder ตรวจสอบให้แน่ใจว่าติดในตำแหน่งที่คุณยังสามารถเปิดฝาของ Battery Holder ได้
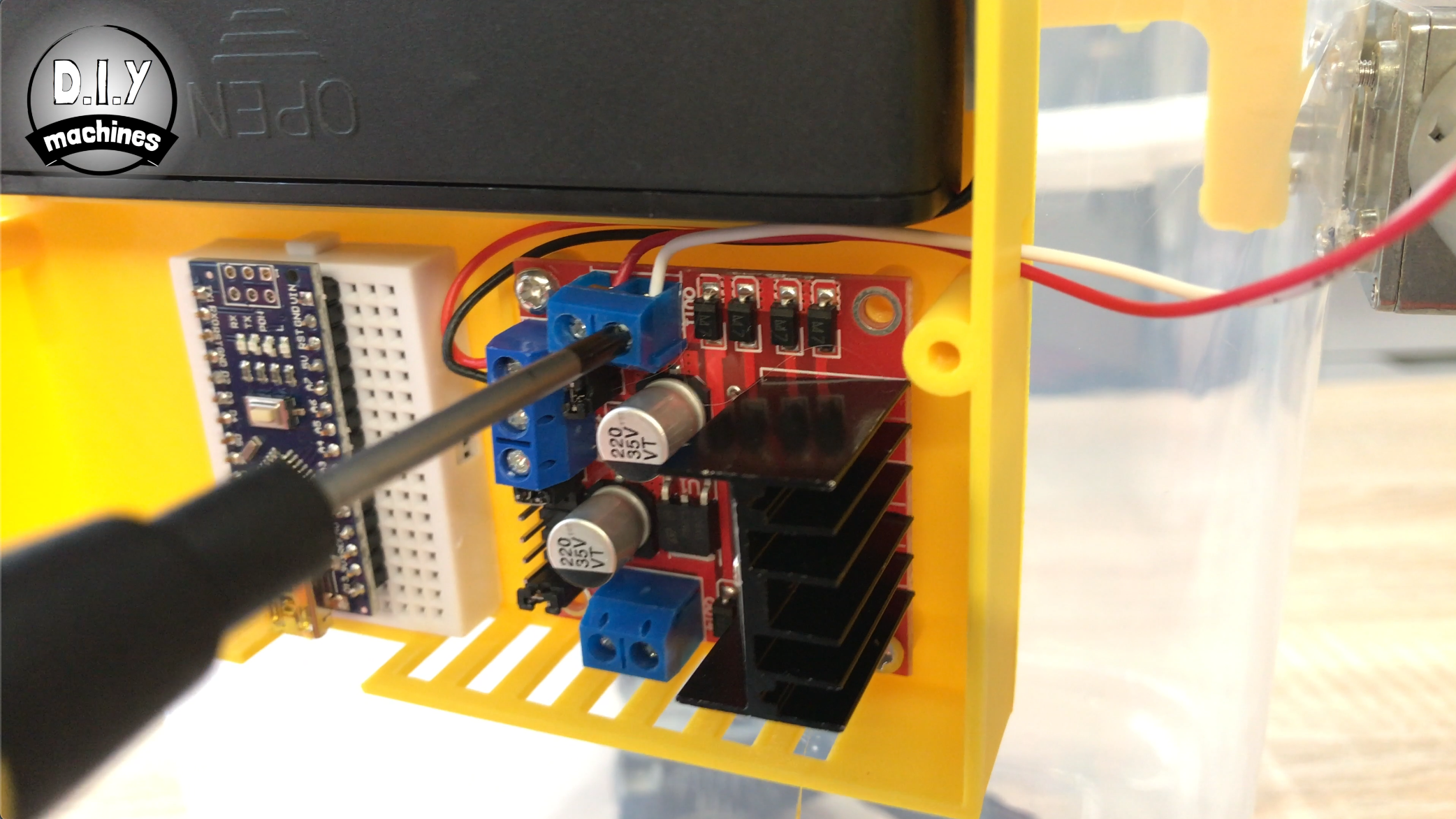
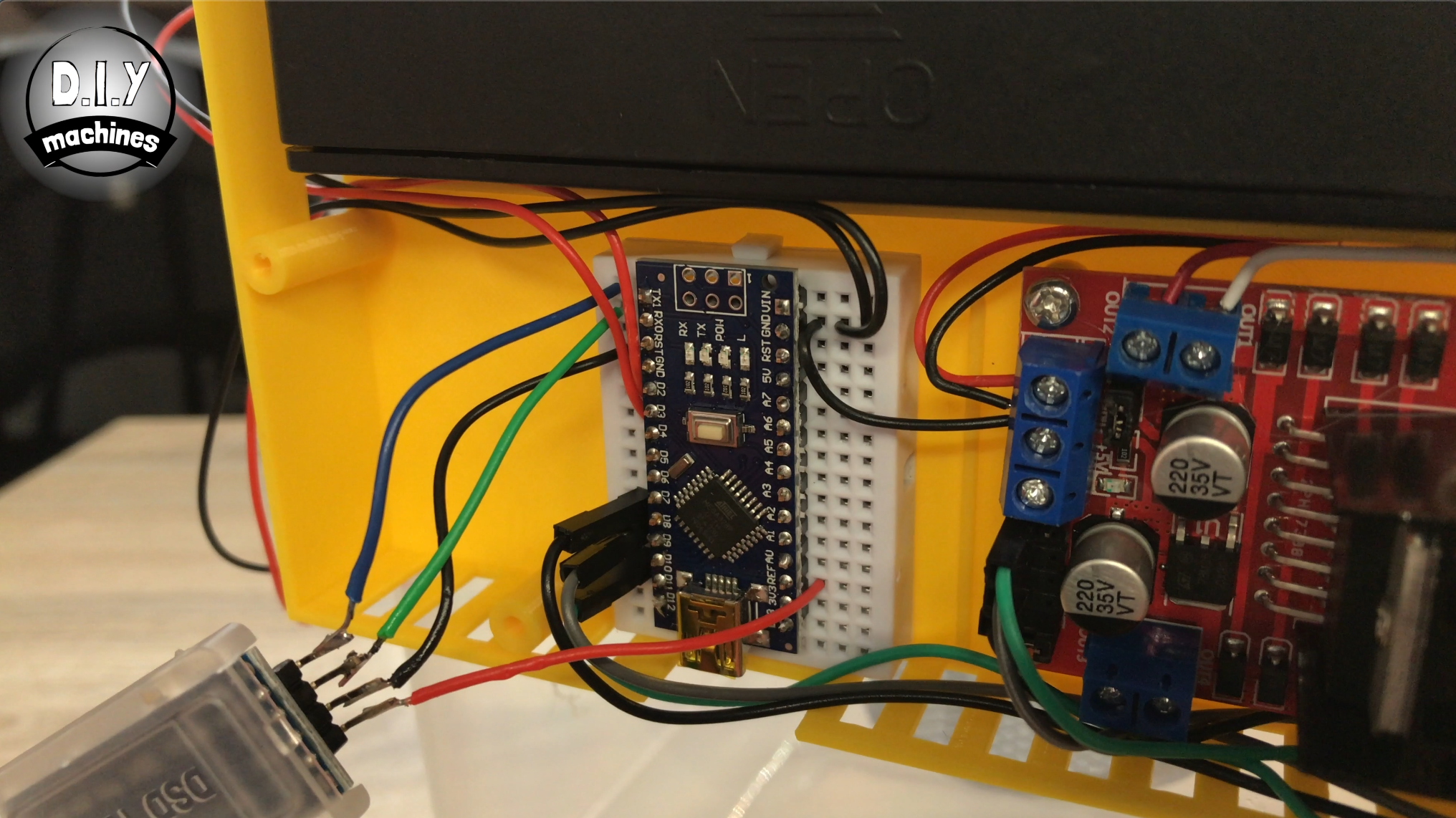
จากนั้นเราสามารถนำสายไฟลงมาที่ด้านข้างของ Battery Holder ข้ามด้านบนของ Motor Driver และเสียบสายบวกเข้าที่ Terminal บนสุดจากทั้งสามช่องของ Motor Driver Board (VCC) และสายลบเข้าที่ช่องกลาง (GND)

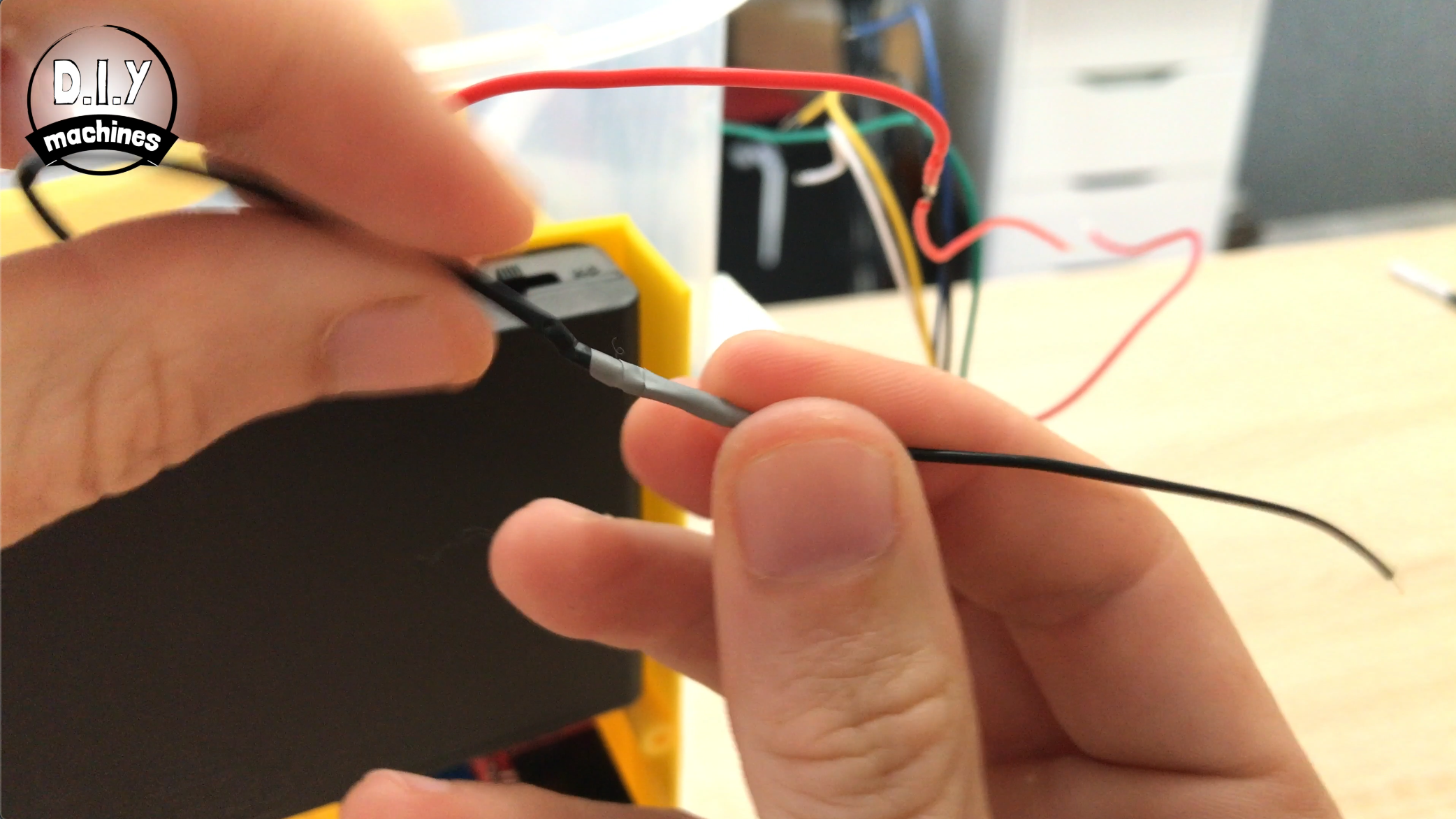
เช่นเดียวกับสายไฟเลี้ยง คุณอาจต้องต่อสายไฟที่มาจาก Motor ของคุณให้ยาวขึ้นสำหรับขั้นตอนต่อไปนี้
สายสีขาวและสีแดงที่มาจาก Motor ให้สอดผ่านรูที่ด้านข้างของ Housing ที่อยู่ใกล้กับ Motor Driver ที่สุด สายสีแดงเชื่อมต่อกับ Terminal ที่ด้านบนซ้าย และสายสีขาวเชื่อมต่อกับ Terminal ที่ด้านบนขวา (คู่ของ Terminal นี้เรียกว่าช่องสำหรับ 'Motor A' บน L298N)
สายสีที่เหลืออีกสี่เส้นไม่ได้ใช้งาน ดังนั้นคุณสามารถถอดออกได้หากต้องการ
สำหรับขั้นตอนนี้ให้เตรียม:
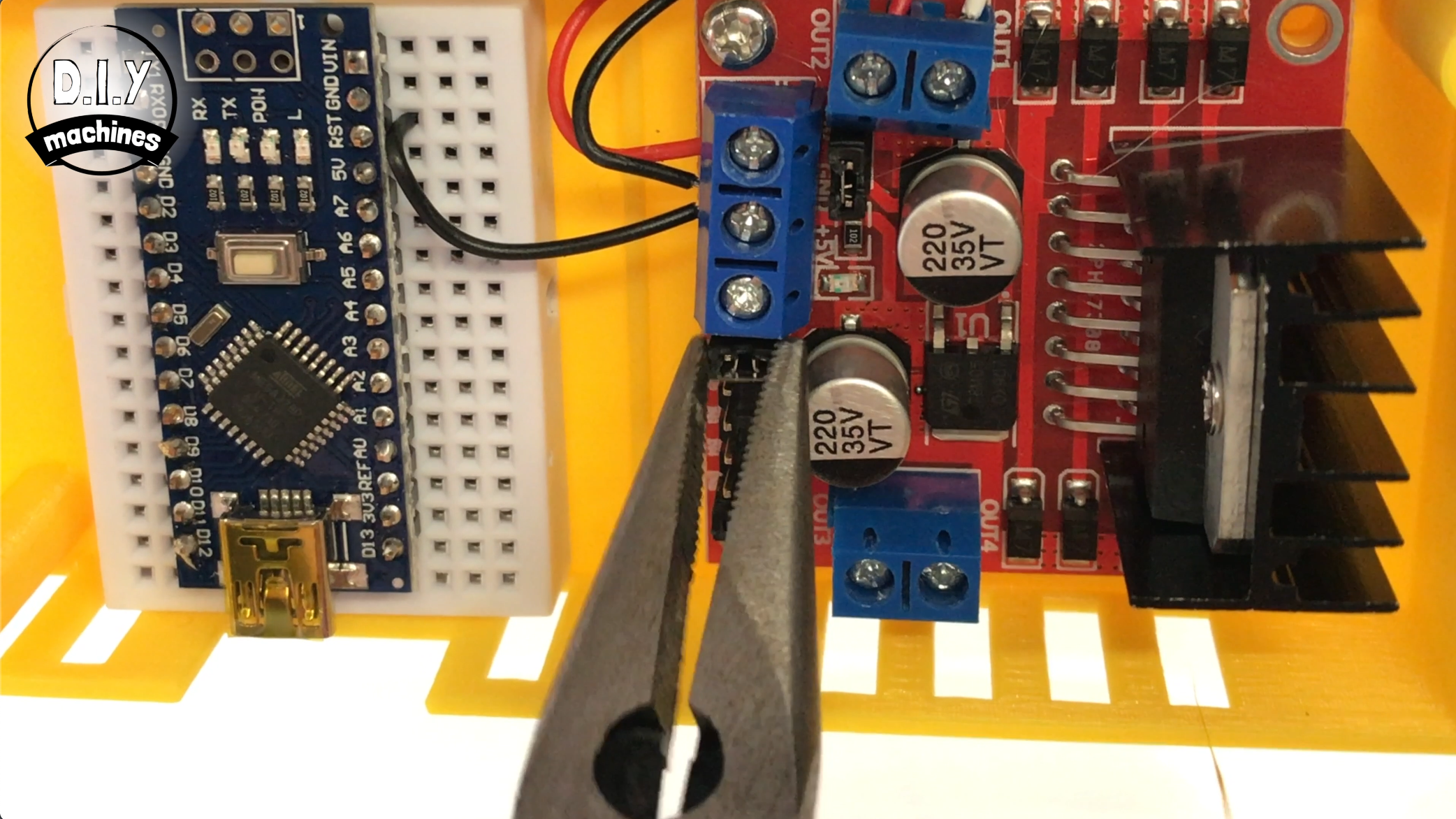
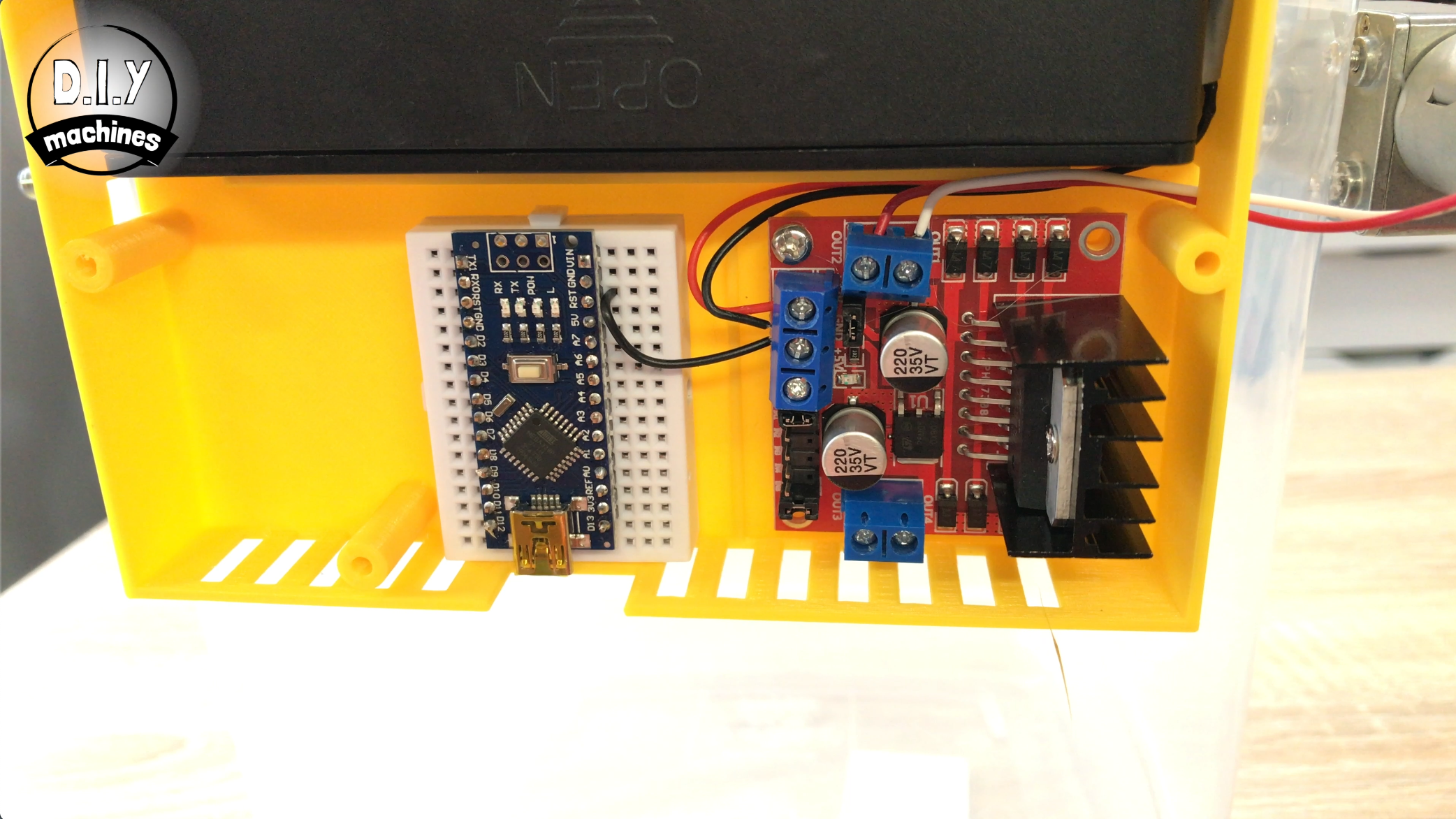
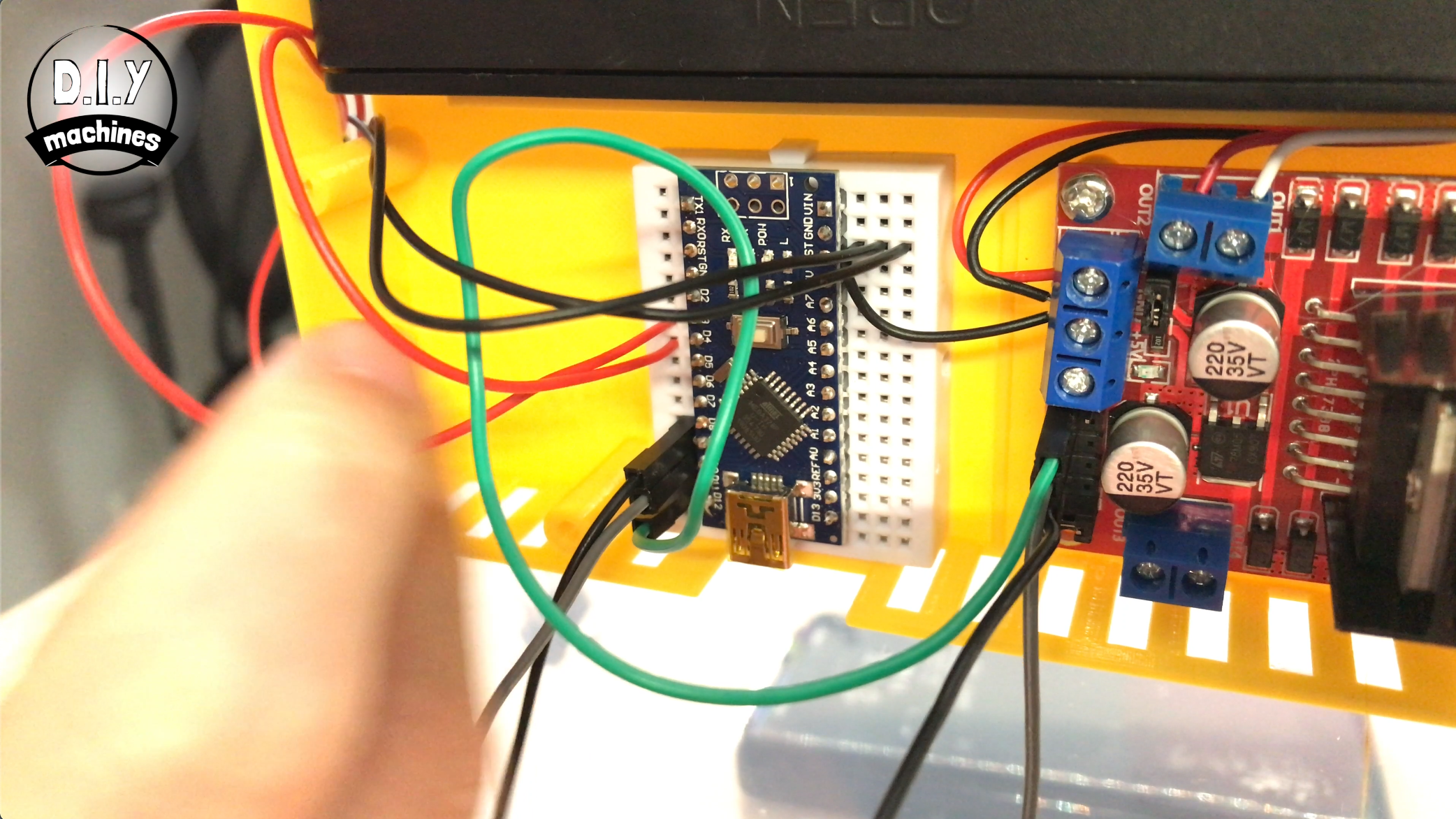
นี่เป็นขั้นตอนที่ง่ายมาก เราต้องเชื่อมต่อ GND ทั้งหมดเข้าด้วยกัน ดังนั้นให้เพิ่มสายไฟสั้นๆ ระหว่าง Terminal GND บน Motor Driver Board (ช่องเดียวกับที่ต่อ Battery Pack ไว้) และเสียบปลายอีกด้านของสายเข้ากับ Terminal GND บน Breadboard
เรายังต้องถอด Jumper ที่อยู่ใต้จุดเชื่อมต่อ 5V บน Motor Driver ออกอย่างรวดเร็วด้วย
ใช้สายไฟเชื่อมต่อจาก 'Enable A' ของ Motor Shield ไปยัง Digital 11 บน Arduino, จาก 'Input 1' บน Motor Shield ไปยัง Digital 9 และสุดท้ายจาก 'Input 2' ไปยัง Digital 8 บน Arduino
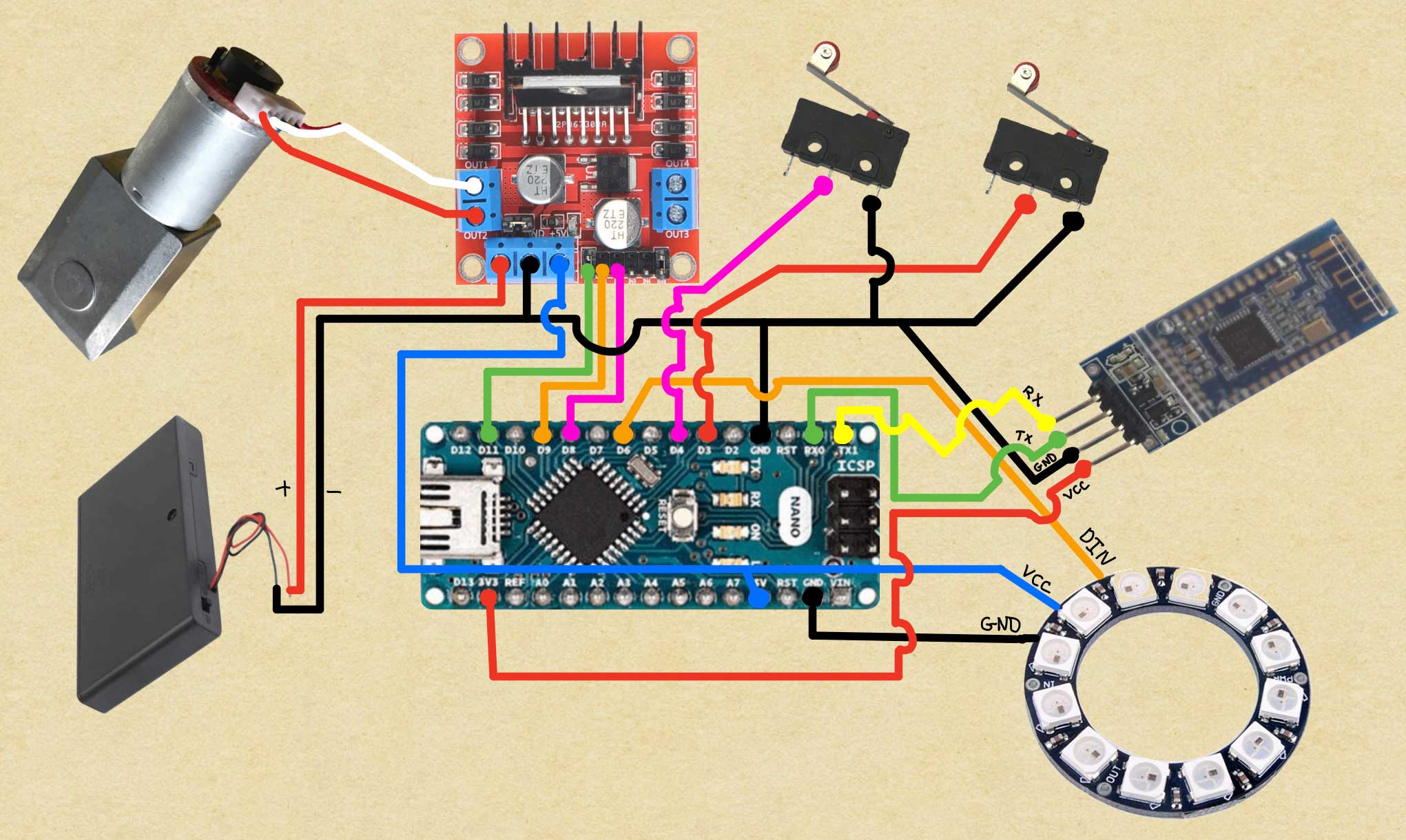
หากรูปภาพหรือชื่อ Pins ไม่ชัดเจนพอ ผมได้แนบแผนผังการเดินสายที่ผมวาดเองไว้ให้ด้วยครับ :)
สำหรับขั้นตอนนี้ให้เตรียม:
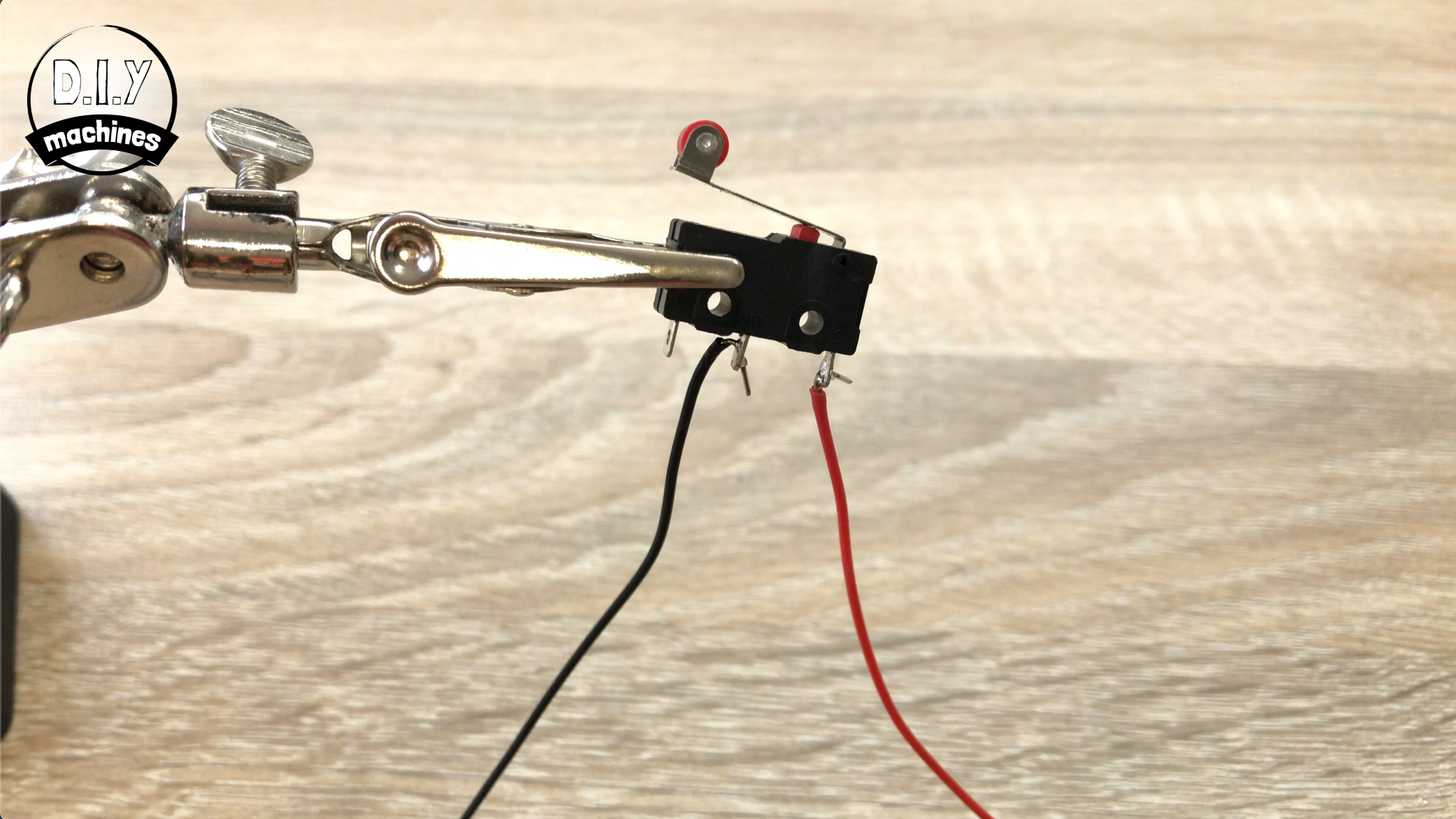
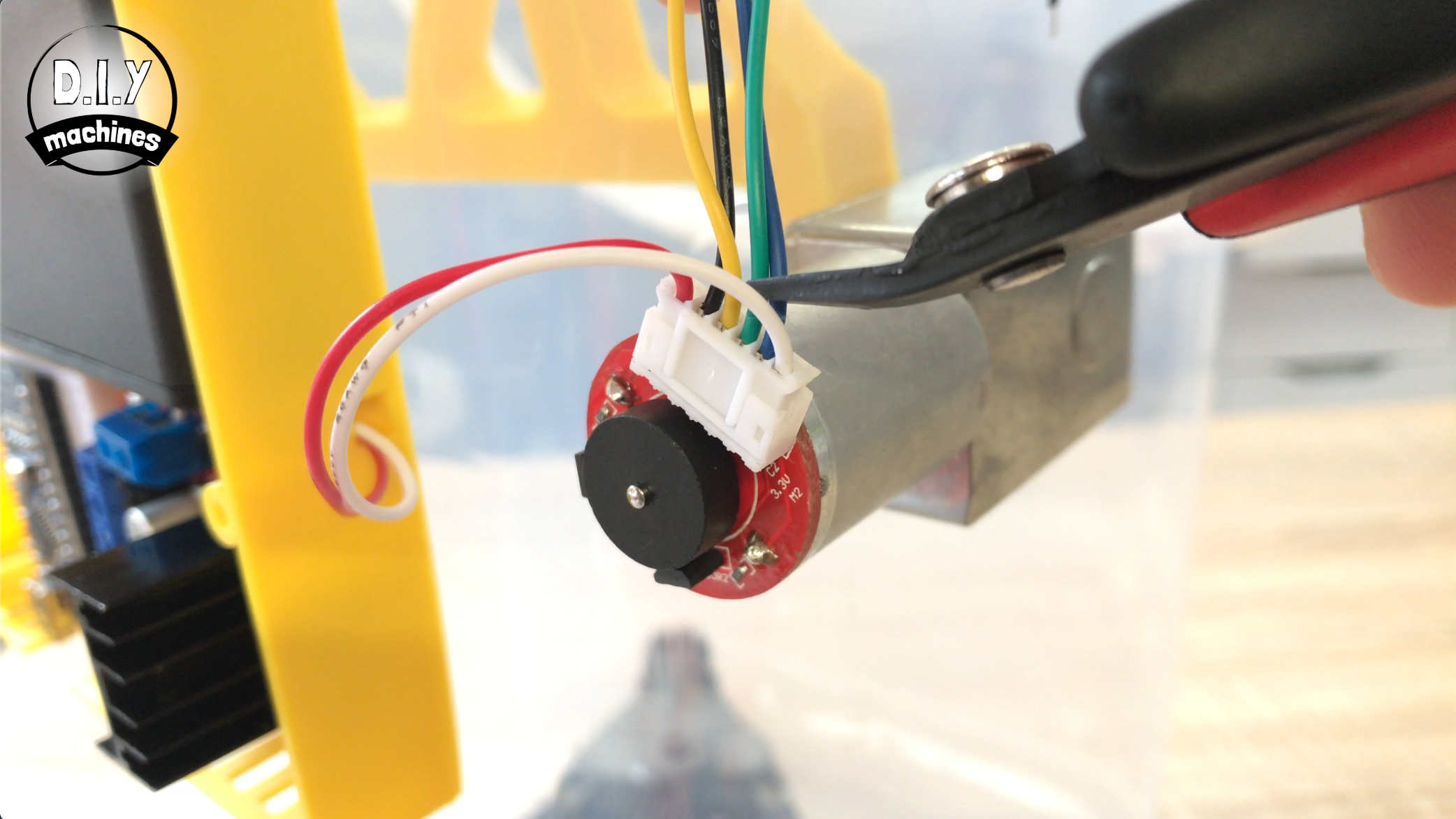
ตอนนี้เราต้องบัดกรีสายไฟเข้ากับ Contact Switches ของเรา สายไฟต้องยาวพอที่จะลากจากตำแหน่งสุดท้ายของ Contact Switch แถวๆ 'limit lever' ผ่านเข้าไปในตัวเคสและกลับไปยัง Arduino Nano
ผมตัดสายให้ยาวประมาณ 25 ซม. ต่อเส้น แล้วค่อยเล็มให้สั้นลงทีหลังหลังจากติดตั้งส่วนอื่นๆ เข้าที่แล้ว
สายไฟต้องเชื่อมต่อกับ Pin ตรงกลางของ Contact Switch และ Pin ที่อยู่ใต้จุดที่ก้านสัมผัสบรรจบกับตัวเสื้อพลาสติก - โปรดตรวจสอบรูปภาพด้านบนเพื่อความชัดเจนอีกครั้ง
เมื่อบัดกรีเสร็จแล้ว ให้สอดสายทั้งสี่เส้นผ่านด้านข้างของเคส
เชื่อมต่อสายหนึ่งเส้นจากสวิตช์แต่ละตัวเข้ากับ GND สายที่เหลือจากสวิตช์ตัวหนึ่งให้ต่อเข้ากับ Digital 3 และสายจากสวิตช์อีกตัวต่อเข้ากับ Digital 4
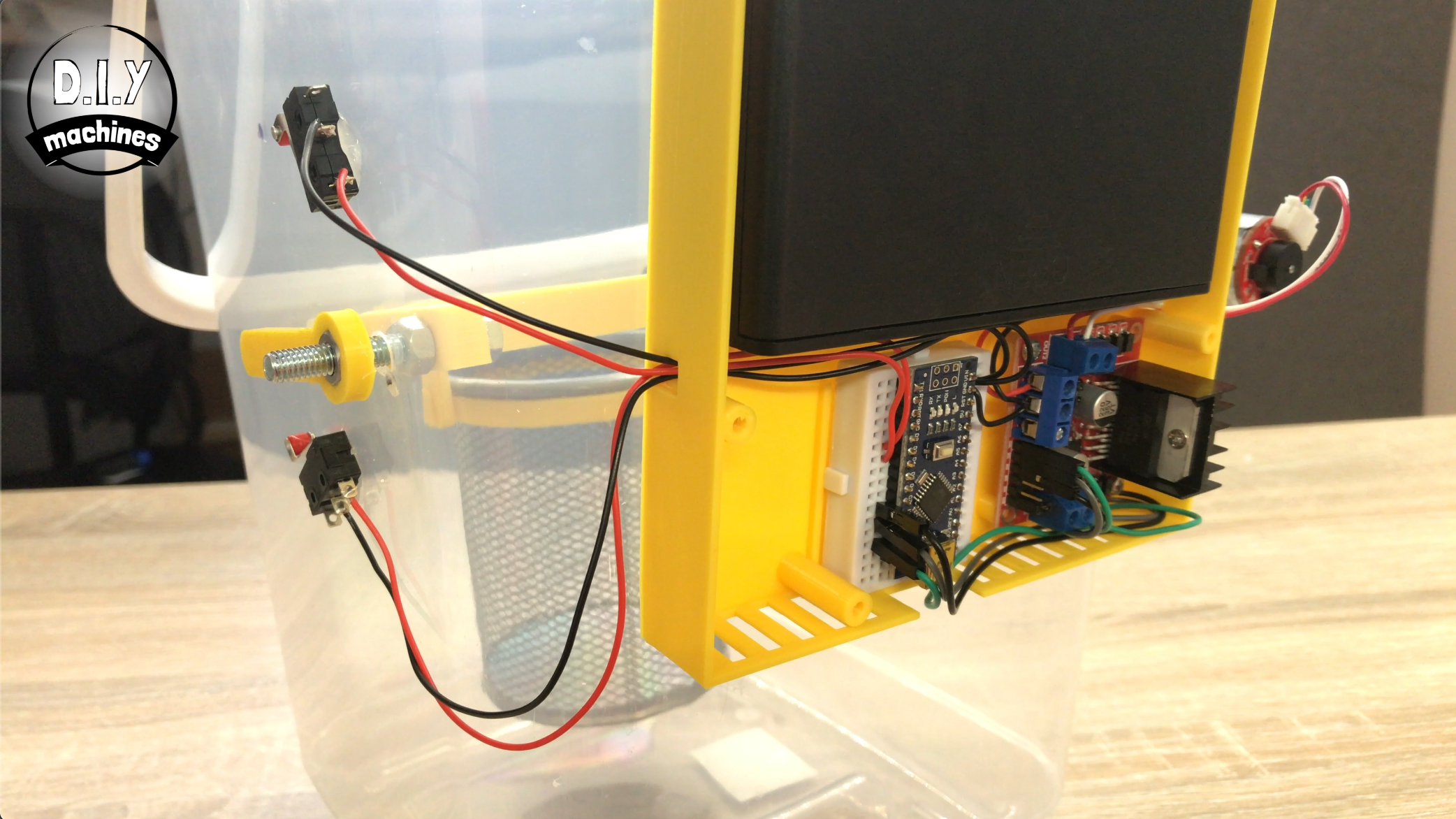
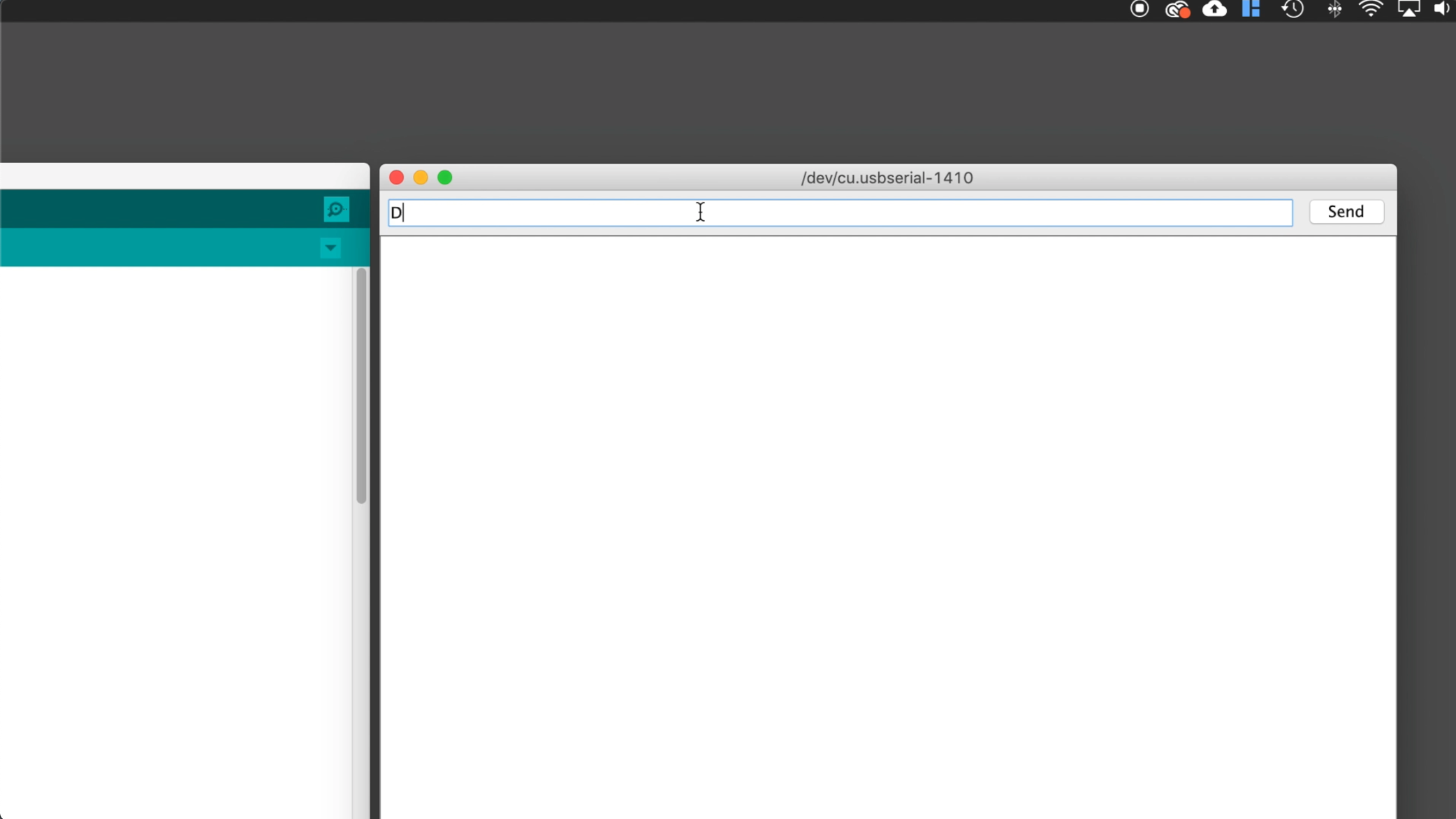
เชื่อมต่อ Arduino เข้ากับ PC ผ่าน USB อีกครั้งและเปิด Arduino IDE เปิด Serial Monitor และตรวจสอบให้แน่ใจว่า Baud rate คือ 9600 ตอนนี้เราจะติดตั้ง Limit Switches ของเรา
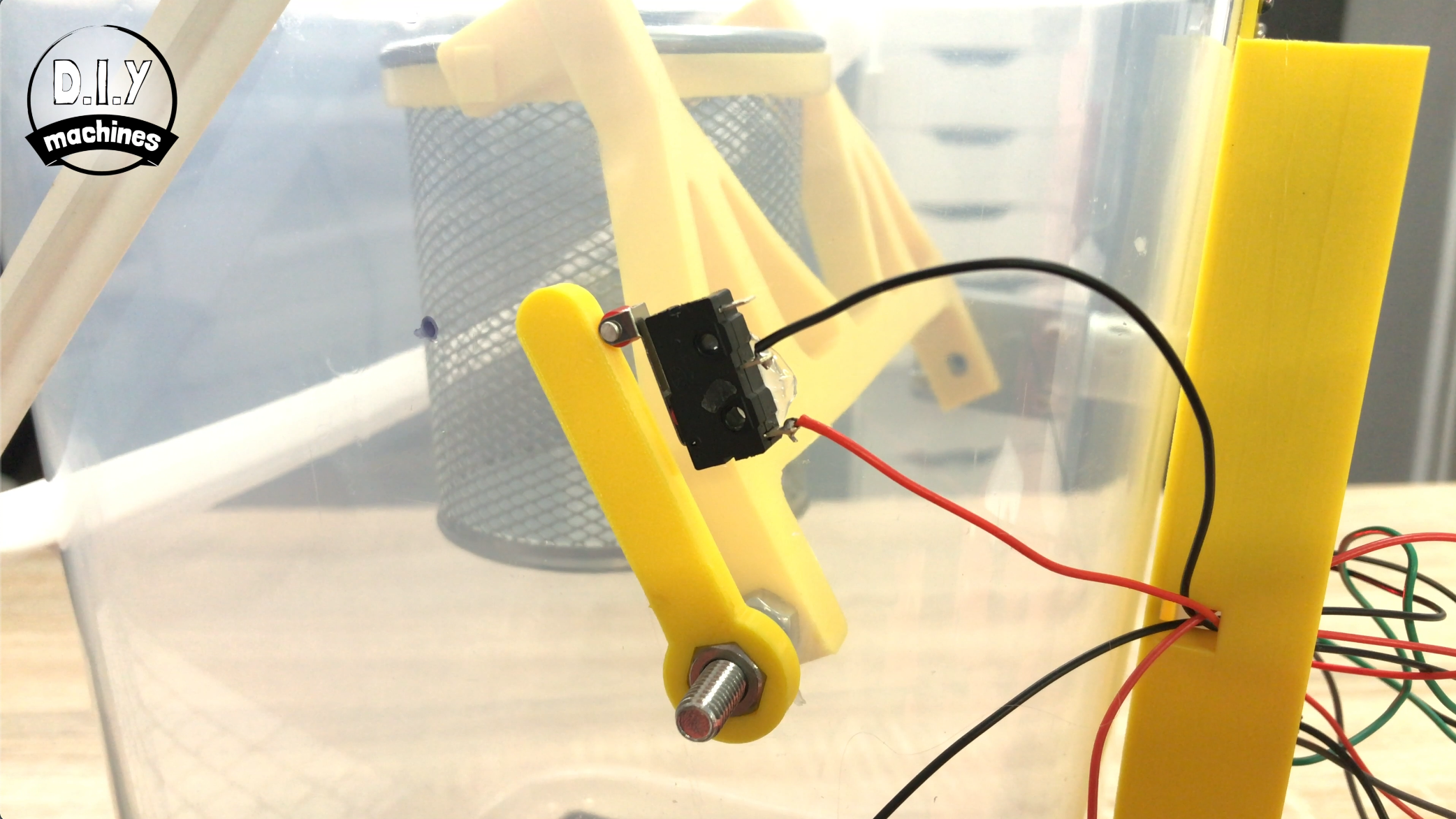
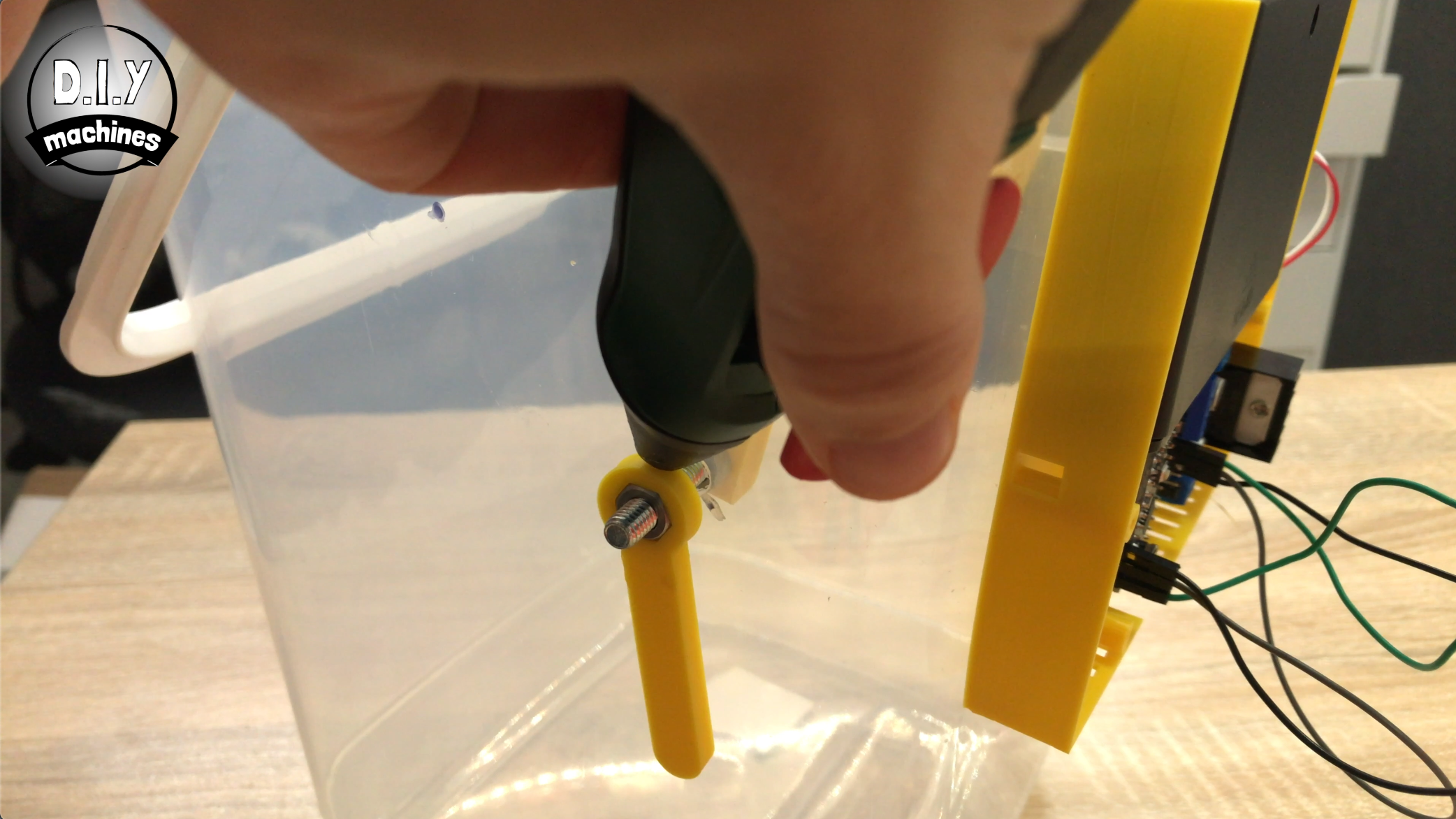
คลายน็อตตรงแขนออกเล็กน้อย ทากาวที่เพลาของ Bolt แล้วขัน Bolt กลับเข้าไปใหม่ ตรวจสอบให้แน่ใจว่าแขนอยู่ในตำแหน่งเดียวกับชิ้นส่วน 3D print ที่อยู่ด้านใน Container
เปิดสวิตช์จ่ายไฟจากแบตเตอรี่ AA ของคุณ
ตอนนี้เมื่อที่ใส่เครื่องเขียนเข้าที่แล้วภายในส่วนประกอบ 3D-printed เราสามารถส่งตัวอักษรพิมพ์ใหญ่ 'D' ผ่าน Arduino Serial Monitor เพื่อลดระดับแขนลงเล็กน้อย ให้ลดลงไปเรื่อยๆ จนกระทั่งที่ใส่เครื่องเขียนสามารถหมุนได้อย่างอิสระโดยไม่ชนกับชิ้นส่วน 3D-printed
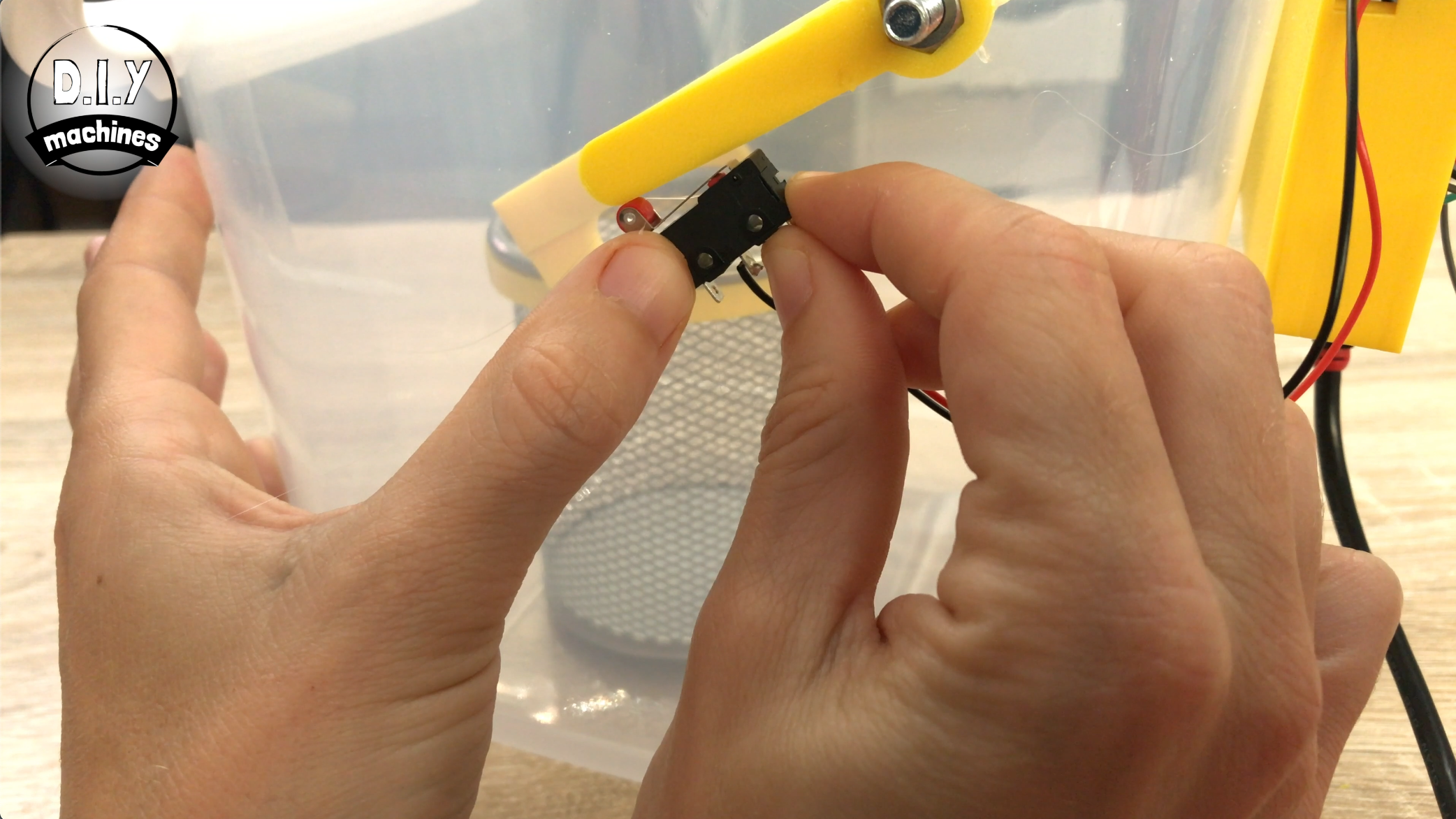
ตอนนี้ทากาวที่ Contact Switch ตัวที่เชื่อมต่อกับ Digital 4 บน Arduino แล้วกดมันเข้าที่ในจุดที่ Contact Switch ถูกกดใช้งาน (engage) ในตำแหน่งปัจจุบันนั้น
คุณสามารถทดสอบว่าสวิตช์นี้ทำงานหรือไม่โดยส่งตัว 'D' ตัวพิมพ์ใหญ่ผ่าน Serial Monitor เพื่อลดระดับ Container และส่งตัว 'U' ตัวพิมพ์ใหญ่สำหรับ 'up' (ขึ้น) Container ควรจะหยุดเคลื่อนที่ทันทีที่มันชนกับ Contact Switch
สำหรับ Limit Switch ตัวล่าง ให้ส่งตัว 'D' เพื่อลงอีกครั้งจนกระทั่งที่ใส่เครื่องเขียนสัมผัสกับก้น Container พอดี
นี่คือตำแหน่งที่คุณต้องทากาวสวิตช์อีกตัว จำไว้ว่า Contact Switch จะต้องถูกกดค้างไว้เมื่อคุณทากาวยึดมันเข้ากับตัวเลเวอร์ ทดสอบสวิตช์นี้อีกครั้งเหมือนที่คุณทำกับตัวก่อนหน้า
ตอนนี้คุณอาจพบว่ามีสายไฟส่วนเกินเหมือนผม คุณสามารถตัดสายไฟเหล่านี้ให้สั้นลงเพื่อช่วยให้ส่วนอิเล็กทรอนิกส์ดูเป็นระเบียบขึ้น
สำหรับขั้นตอนนี้ให้เตรียม:
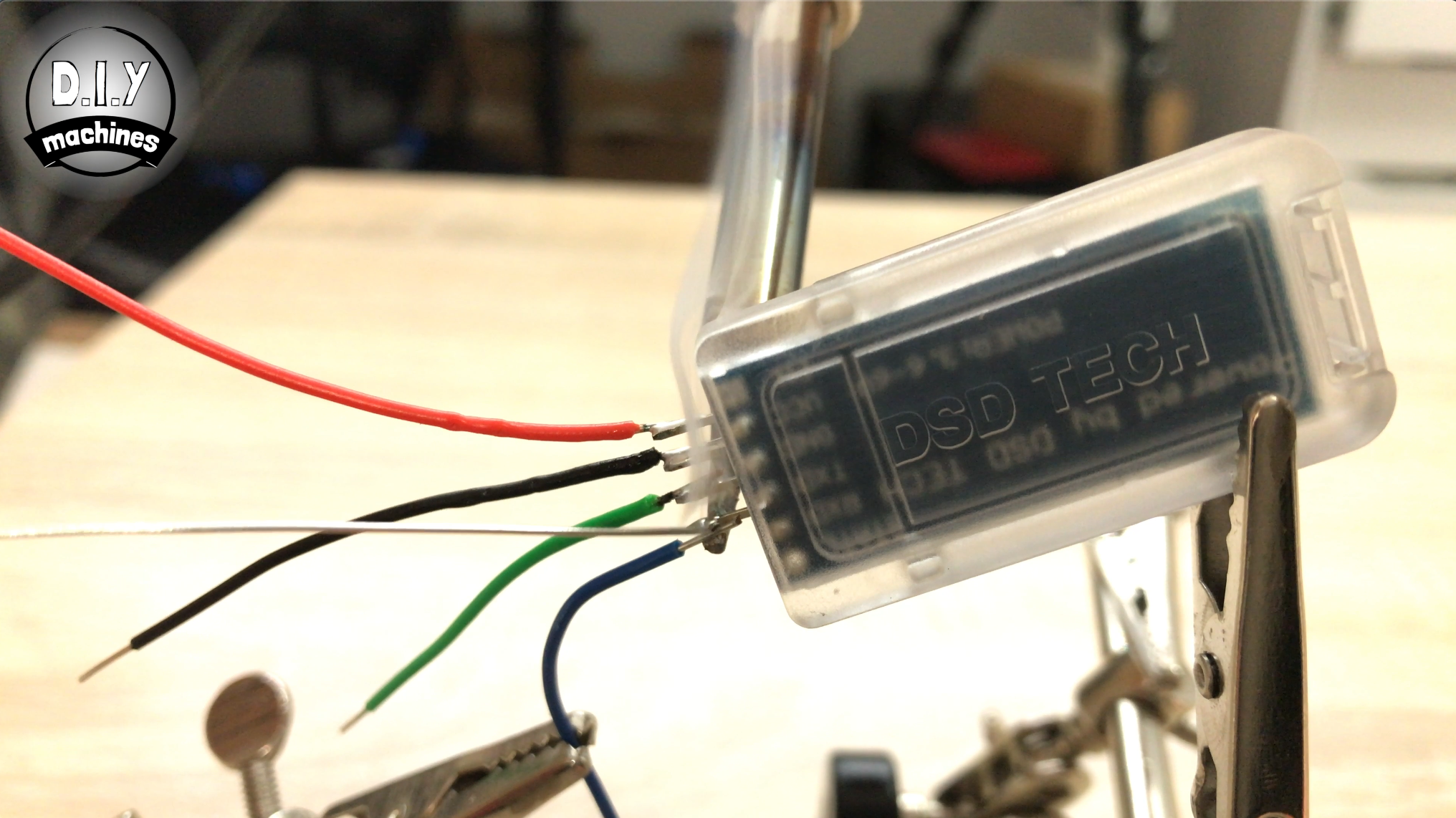
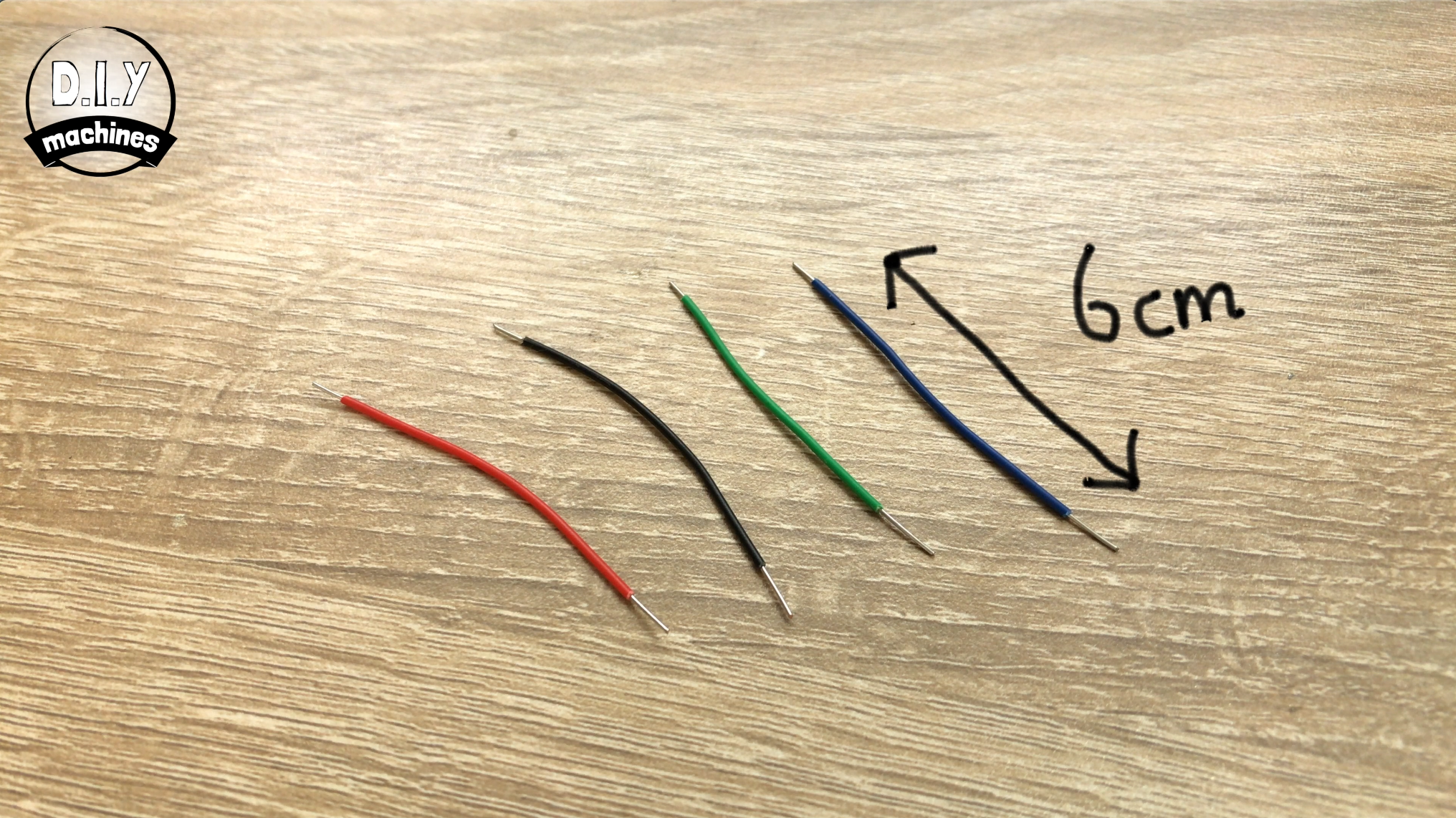
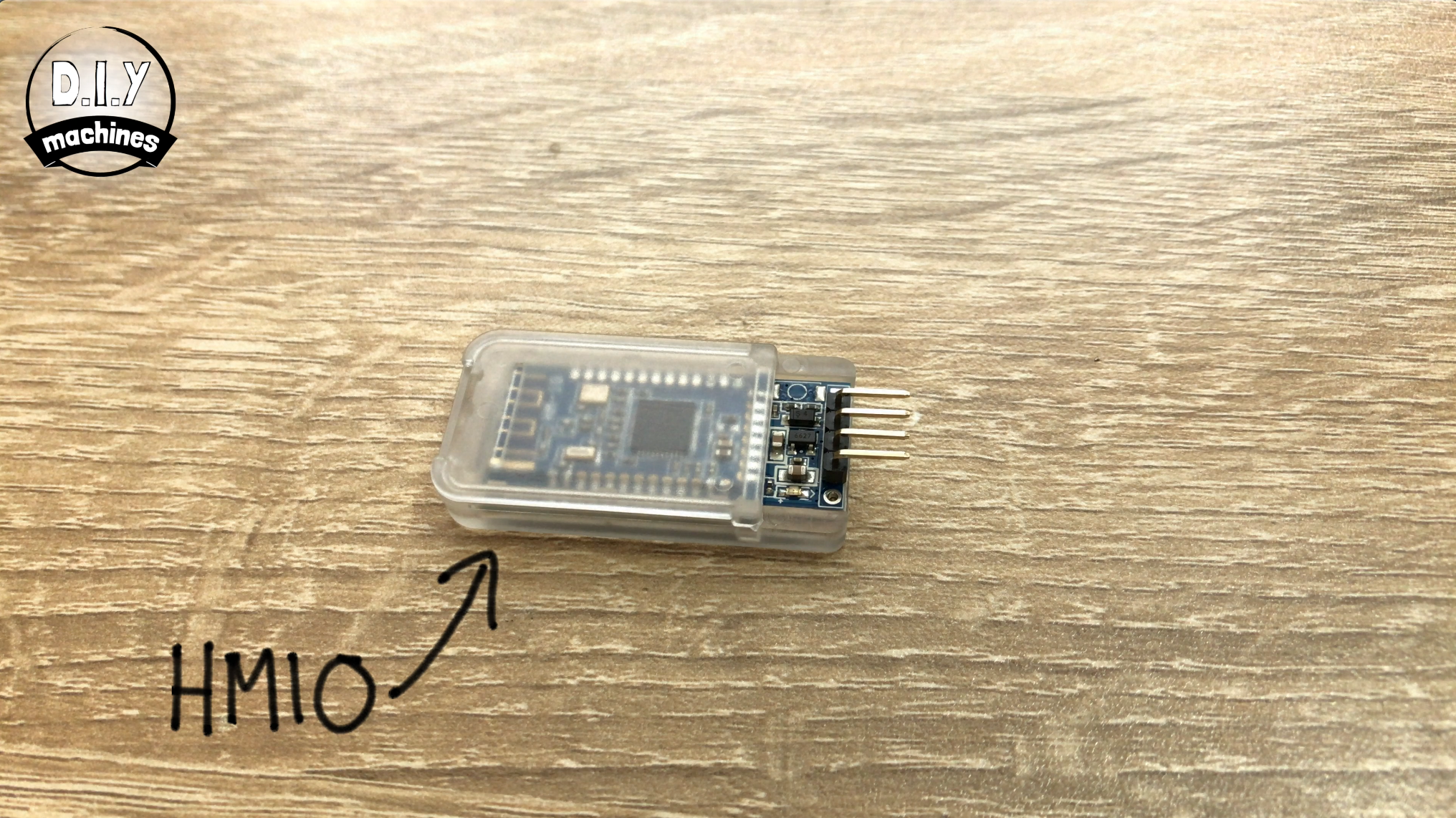
หยิบ Bluetooth Module มาแล้วบัดกรีสายไฟยาว 6 ซม. เข้ากับขาทั้งสี่ขา
ค่อยๆ ดัดสายไฟบน Bluetooth Module และติดตั้งมันลงในตำแหน่งของมัน
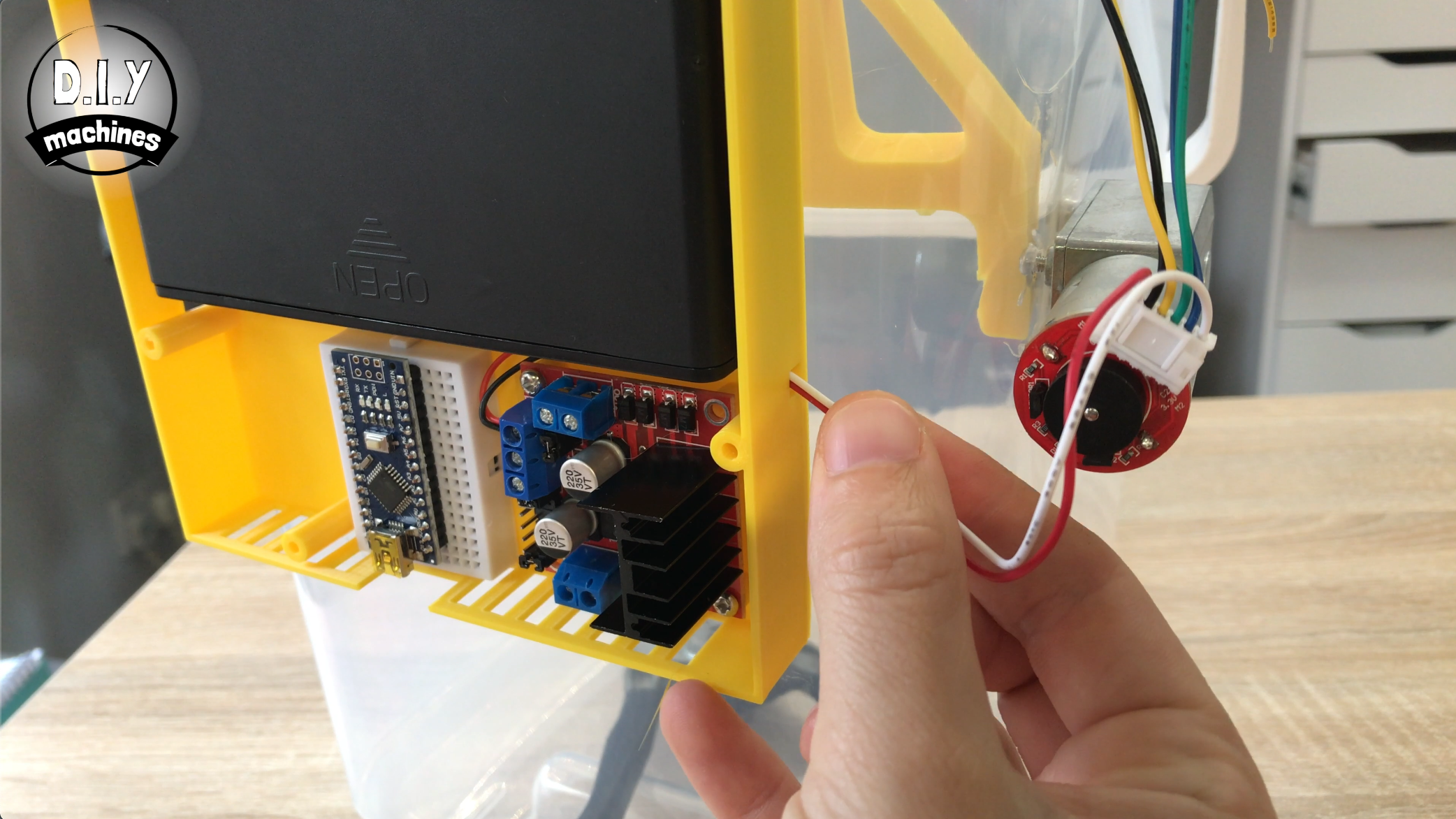
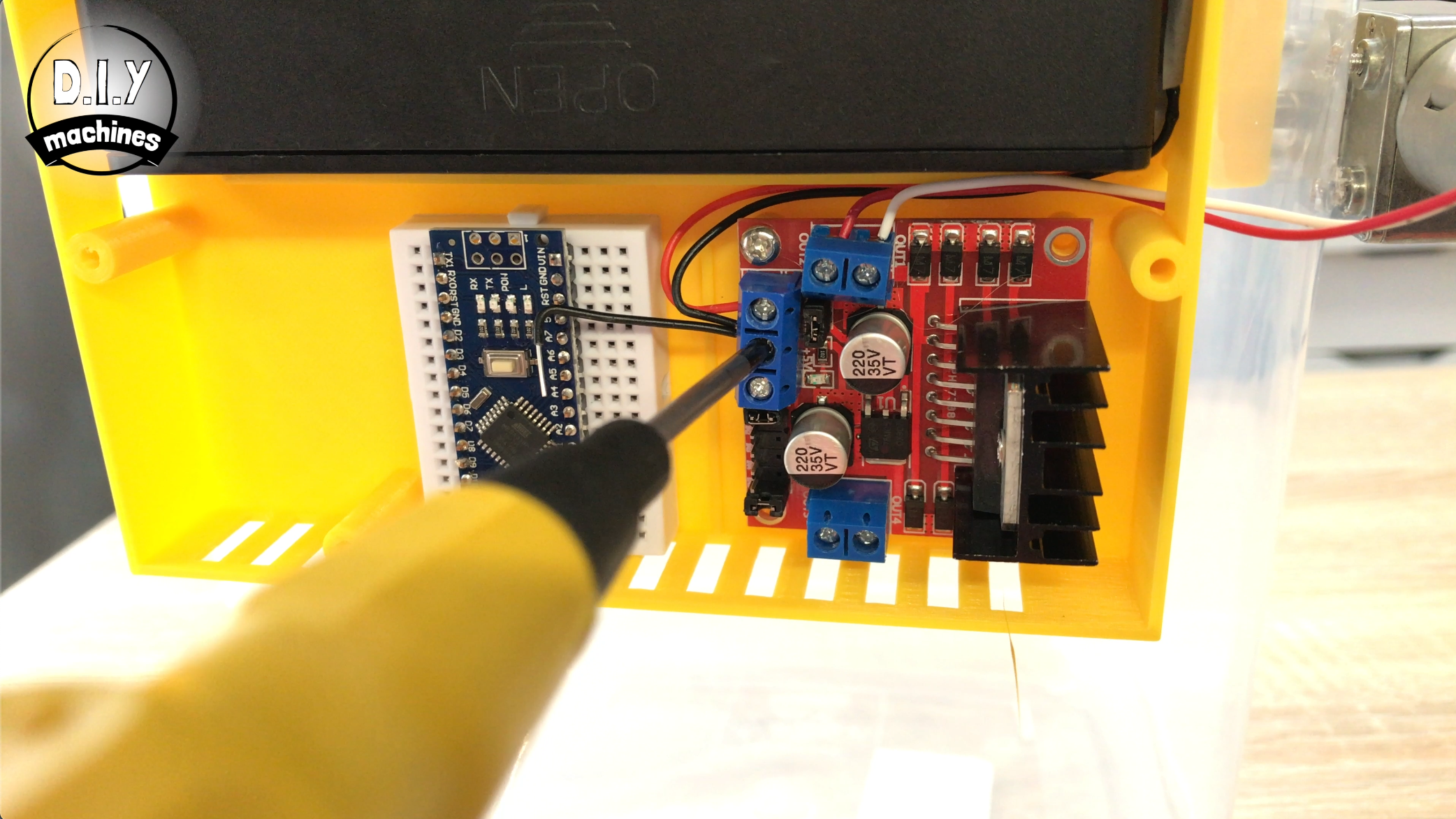
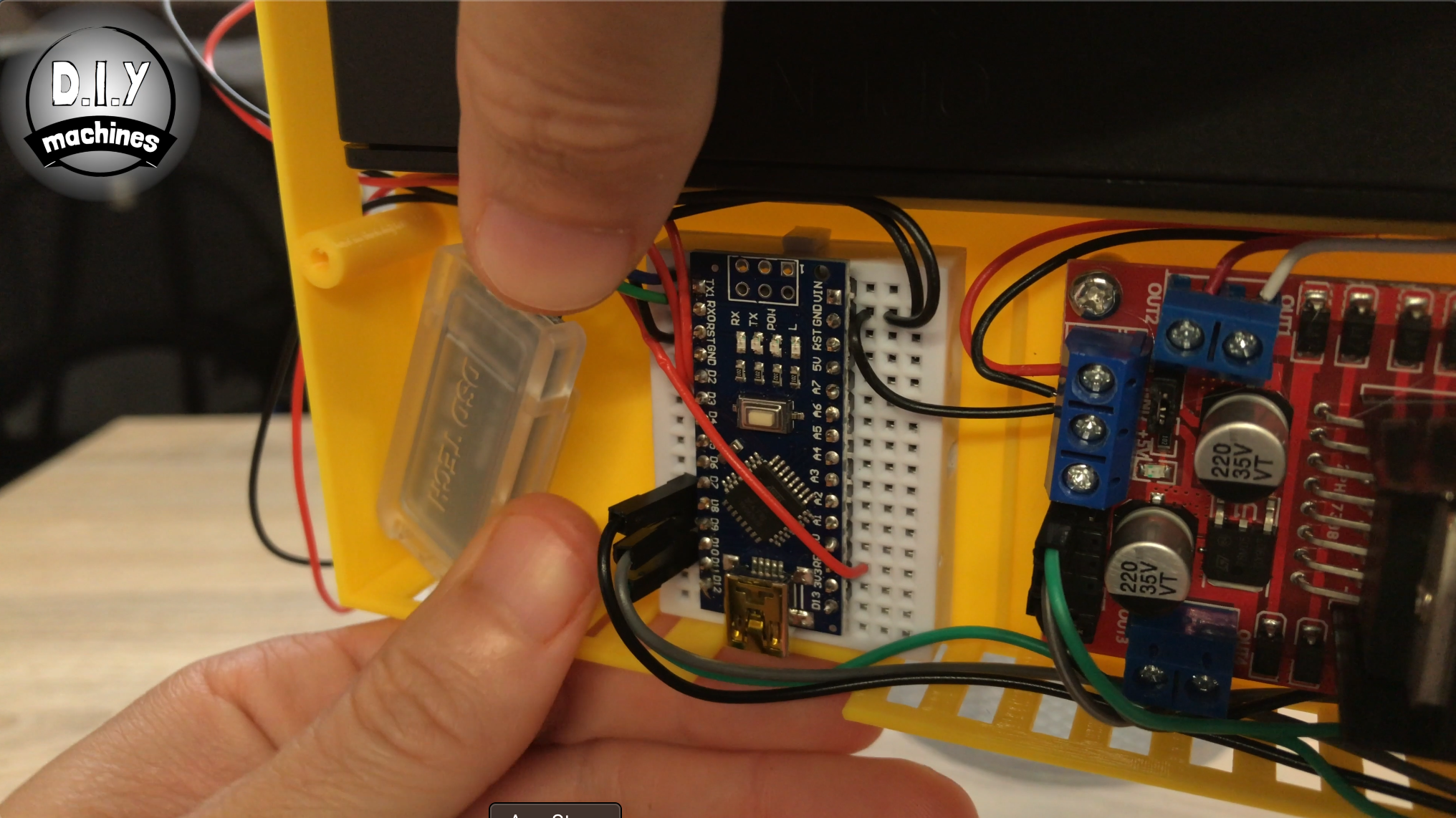
ตอนนี้เราสามารถเชื่อมต่อ Arduino เข้ากับไฟแบตเตอรี่ได้แล้ว โดยเราจะต่อผ่านช่อง Output 5v บน Motor Board เนื่องจากแบตเตอรี่ของเราจ่ายไฟประมาณ 12v หากเราเชื่อมต่อโดยตรง
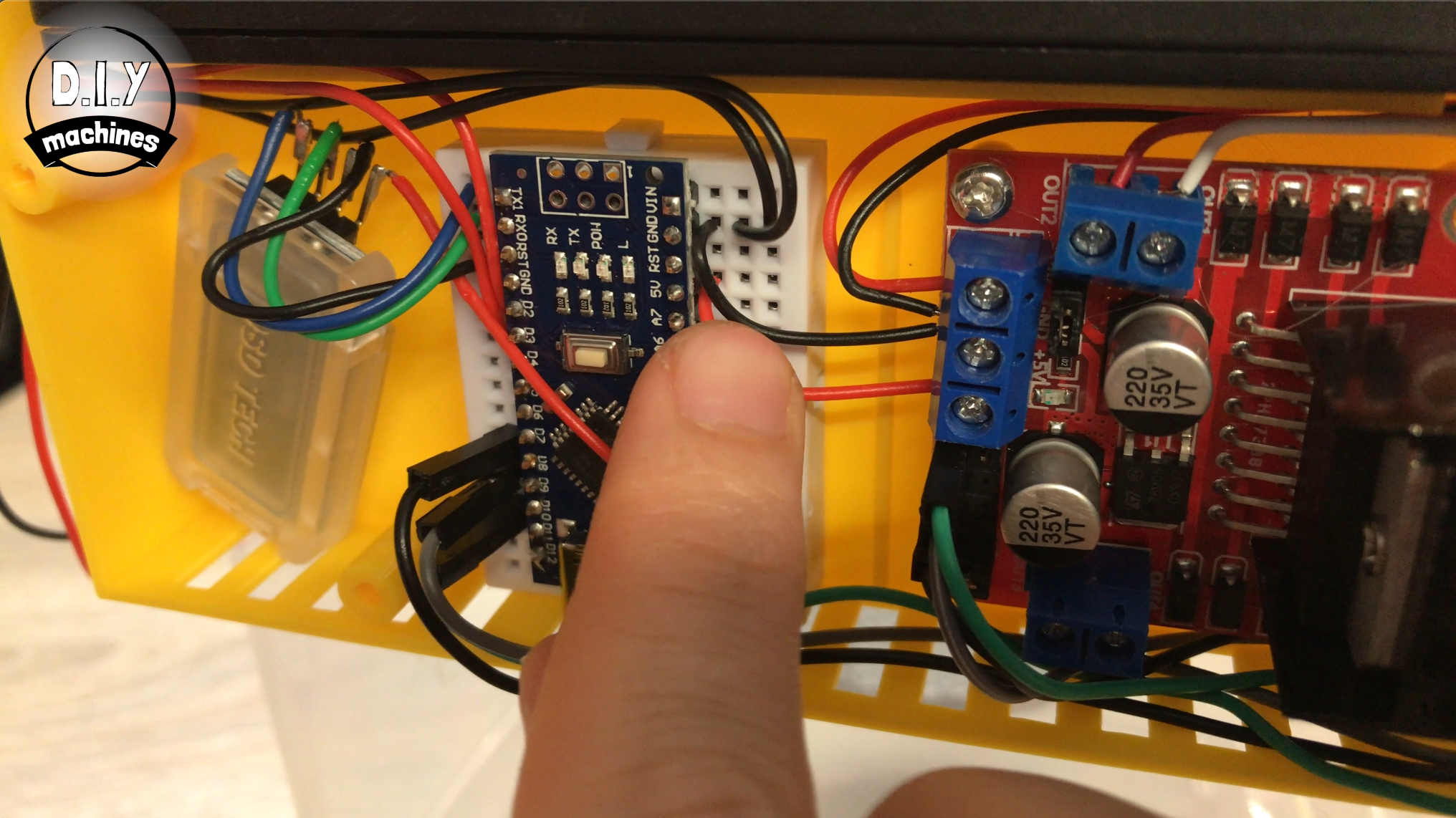
เพิ่มสายไฟสั้นๆ ระหว่างจุดเชื่อมต่อ 5V บน Motor Driver (ช่องล่างสุดจาก Terminal ทั้งสามช่อง) ไปยัง Pin 5V บน Arduino คือสายสีแดงที่ผมนิ้วจิ้มอยู่ในรูปนั่นเอง
หากคุณทำถูกต้อง เมื่อเปิด Battery Pack ไฟ LED ควรจะสว่างขึ้นบน Motor Driver, Nano และ Bluetooth Module :)
สำหรับขั้นตอนนี้ให้เตรียม:


มี Nozzle สองแบบที่ผมจะสอนวิธีสร้าง
'Nozzle 1' คือแบบที่แสดงในฝาสีขาวด้านบน มันยอดเยี่ยมมากในการสร้างหมอกควันที่หนาและเลี่ยไปกับพื้น
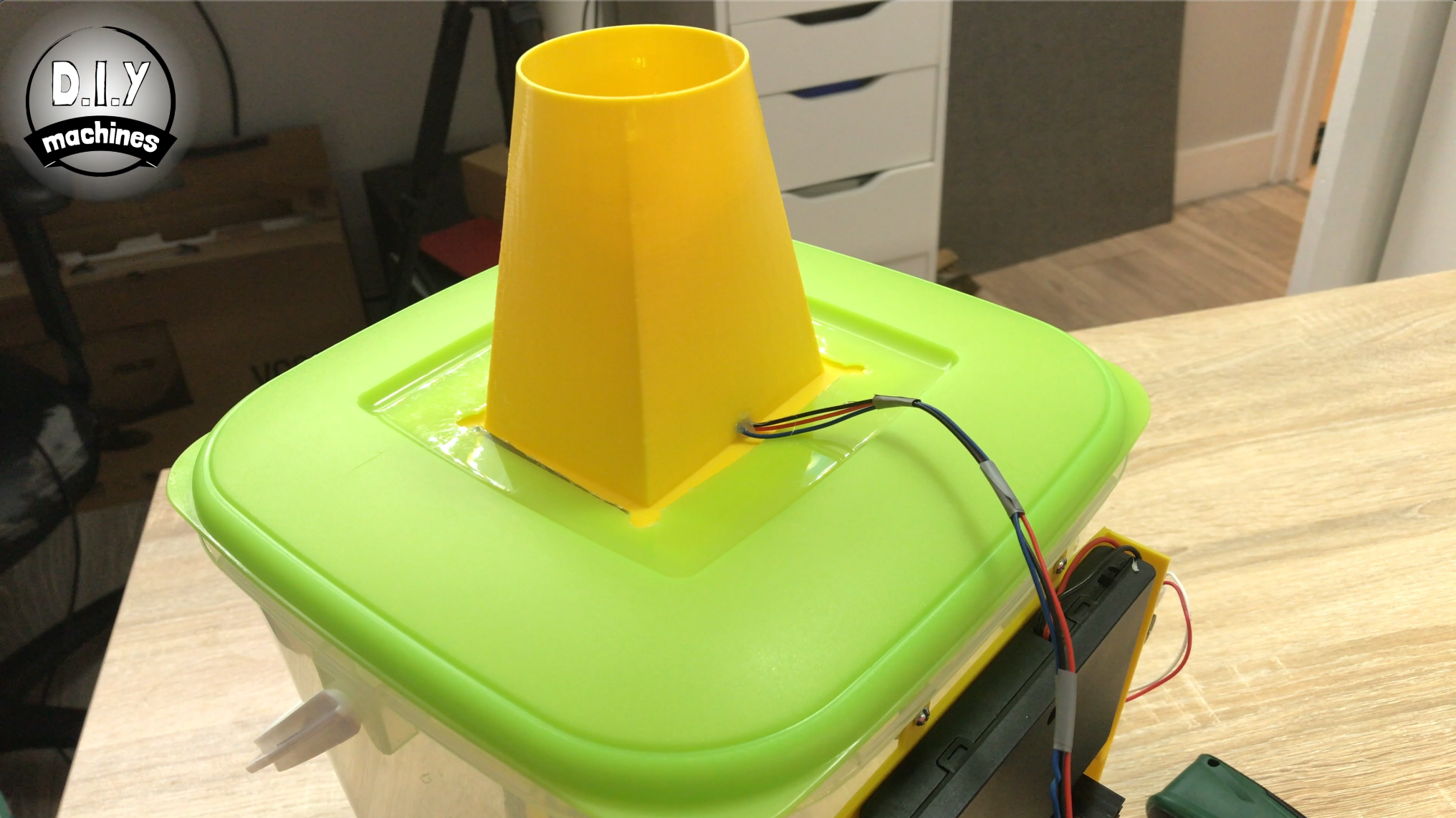
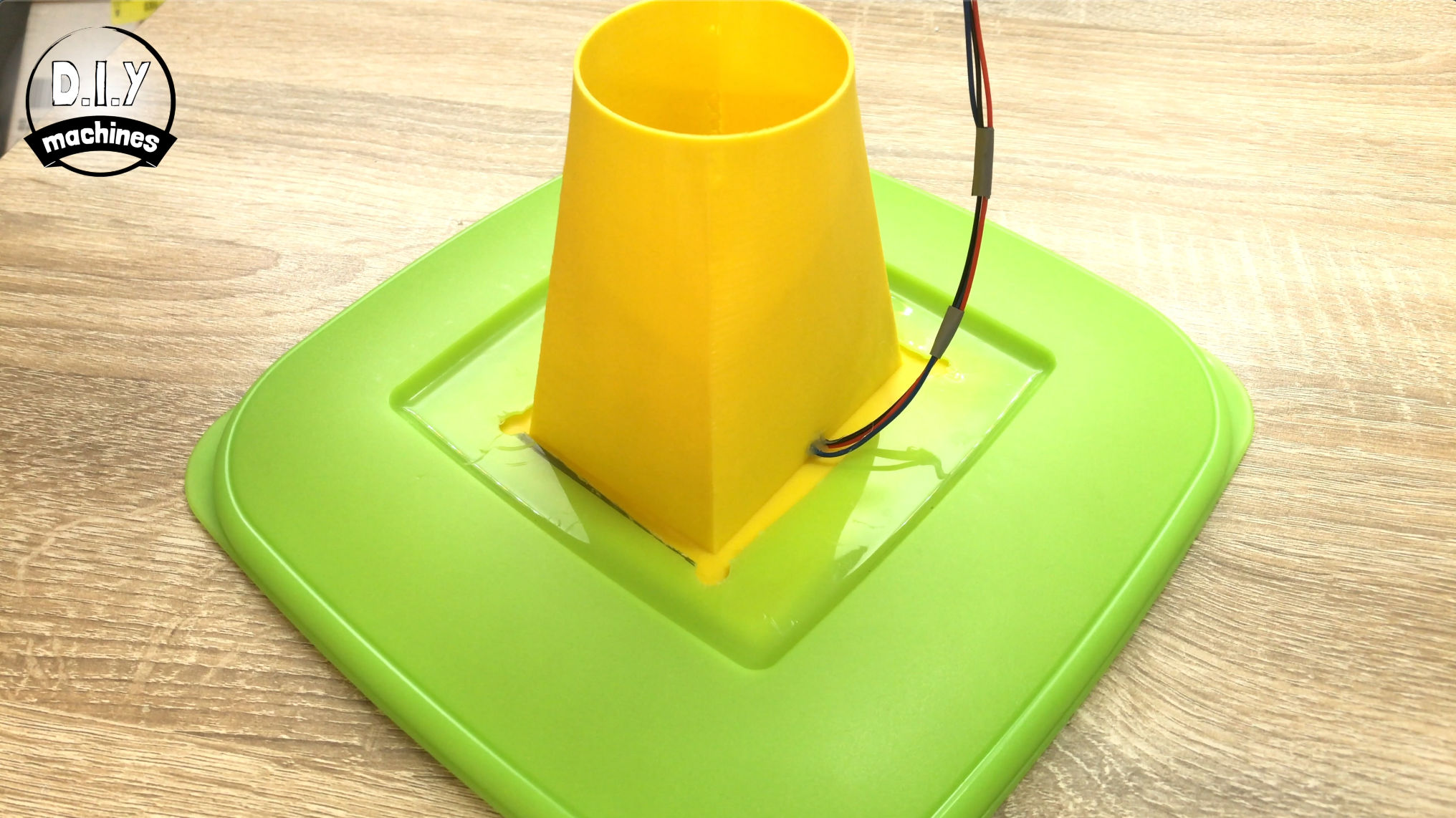
'Nozzle 2' คือแบบที่แสดงในฝาสีเขียว ตัวนี้จะทำงานเหมือนภูเขาไฟและพ่นหมอกขึ้นไปด้านบน นอกจากนี้ยังมี LEDs ในตัวที่ช่วยให้คุณฉายแสงใส่หมอกได้ด้วย
สำหรับทั้งสองแบบ เราต้องเตรียมฝาในลักษณะเดียวกัน ดังนั้นผมจะอธิบายในขั้นตอนนี้ และถ้าคุณต้องการทำ 'Nozzle 1' ให้ทำขั้นตอนถัดไปต่อ แต่ถ้าต้องการ 'Nozzle 2' ให้ข้ามขั้นตอนถัดไปได้เลย
แน่นอนว่าคุณสามารถทำทั้งสองแบบและสลับเปลี่ยนไปมาได้อย่างง่ายดาย
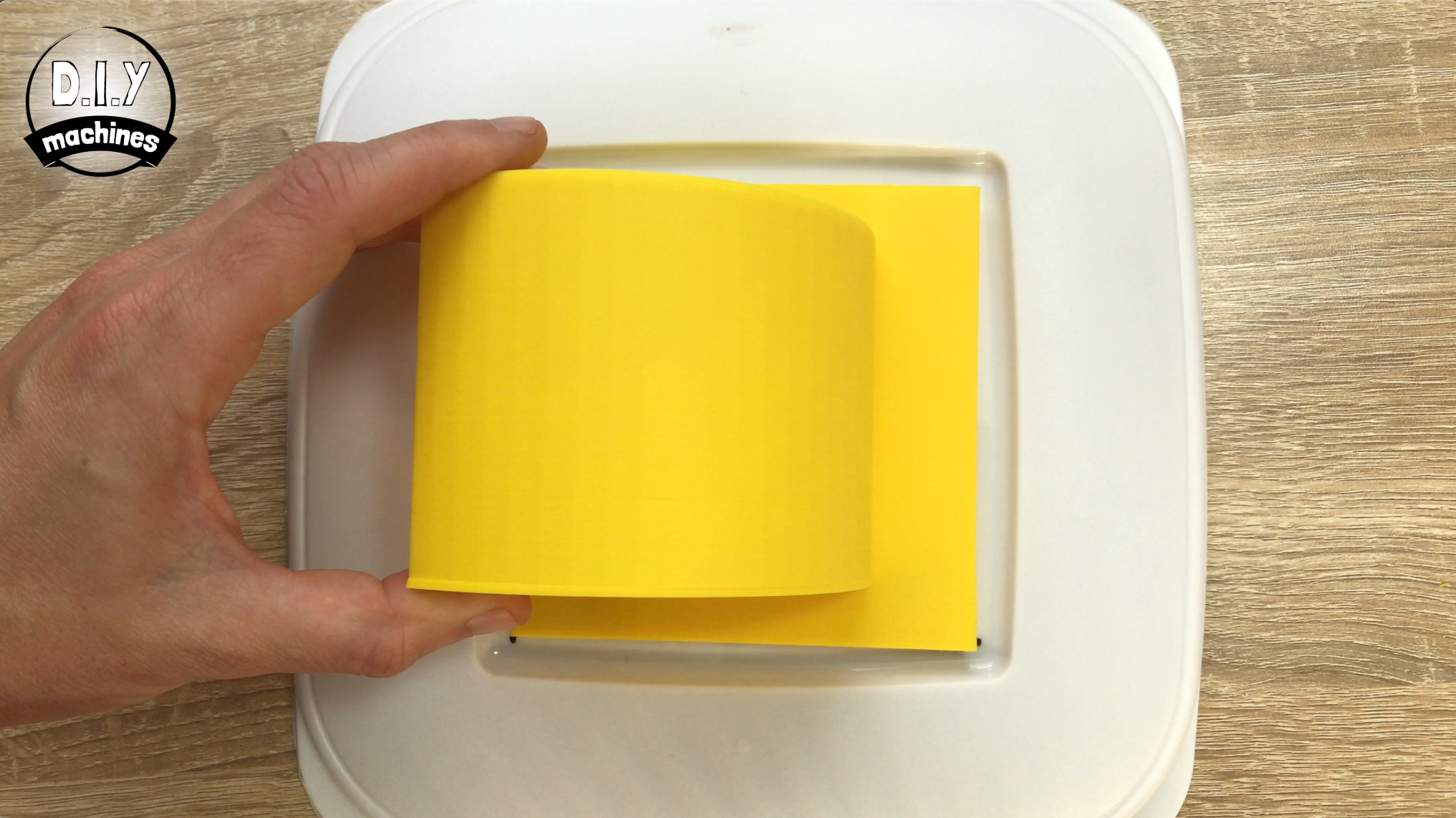
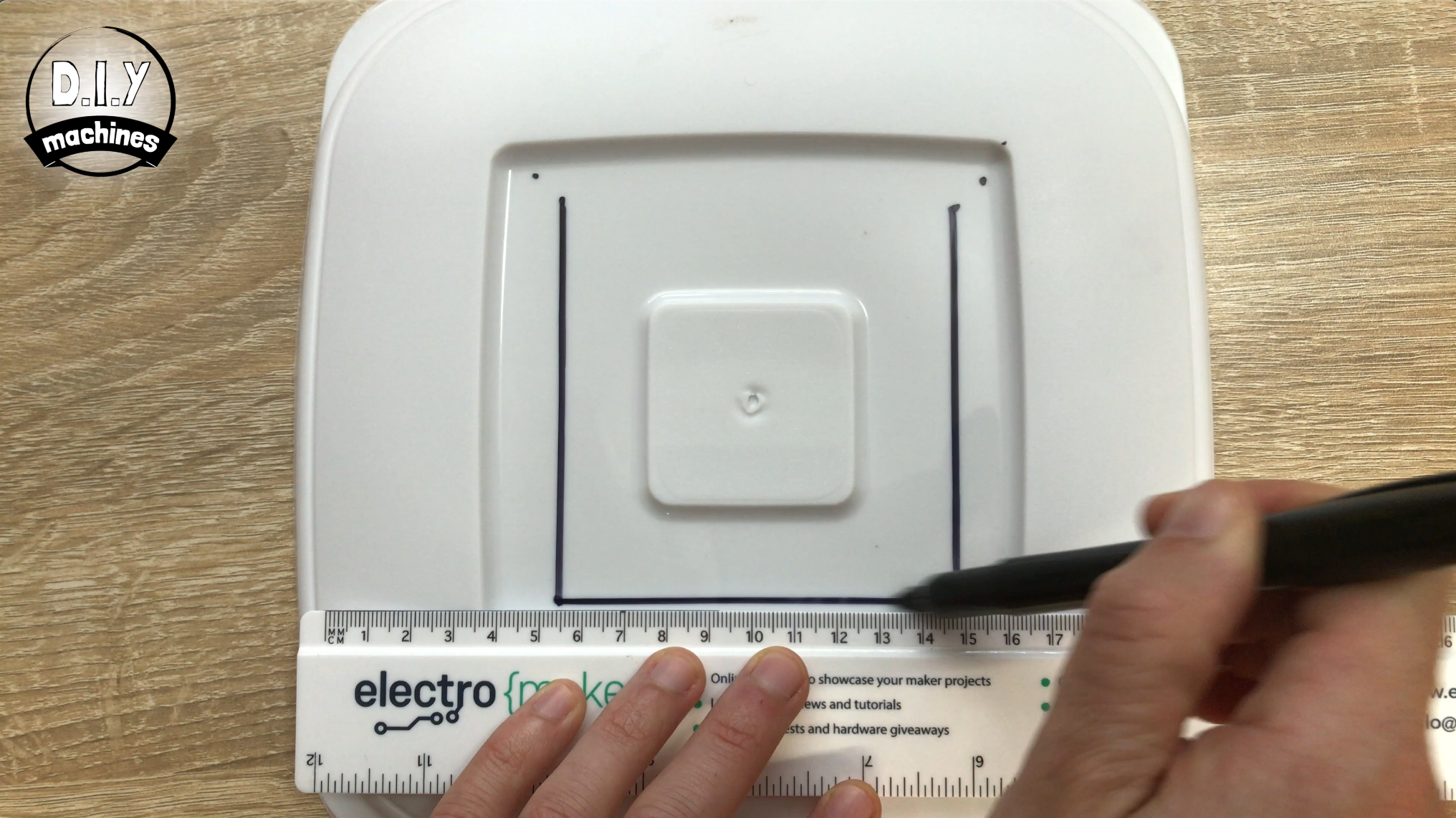
หยิบ Nozzle ที่พิมพ์ออกมาตัวใดตัวหนึ่งมาวางบนฝา มาร์กตำแหน่งมุมทั้งสี่ ถอด Nozzle ออกแล้วมาร์กจุดอีกชุดหนึ่งเข้าไปด้านในประมาณ 1 ซม. จากจุดสี่จุดแรก
ลากเส้นเชื่อมระหว่างจุดเหล่านี้แล้วตัดช่องสี่เหลี่ยมตามที่วาดไว้

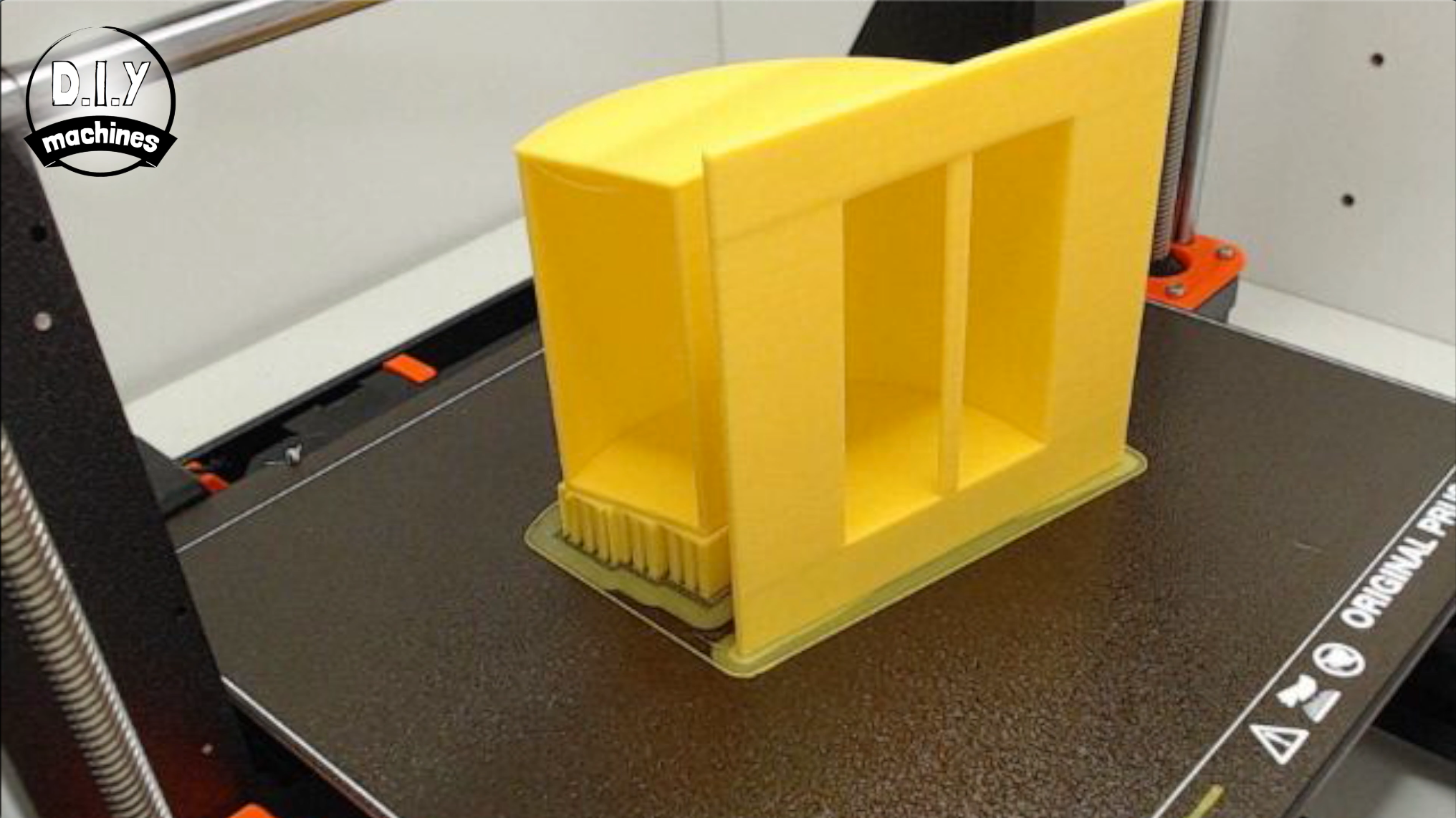
หากคุณยังไม่ได้พิมพ์ ให้พิมพ์ Nozzle ออกมา ผมพิมพ์ของผมที่ layer height 0.2mm โดยวางตะแคงและใช้ support เฉพาะบน Build plate เท่านั้น ผมยังเพิ่ม brim เพื่อช่วยให้งานพิมพ์ยึดติดกับฐานพิมพ์ได้ดีขึ้น
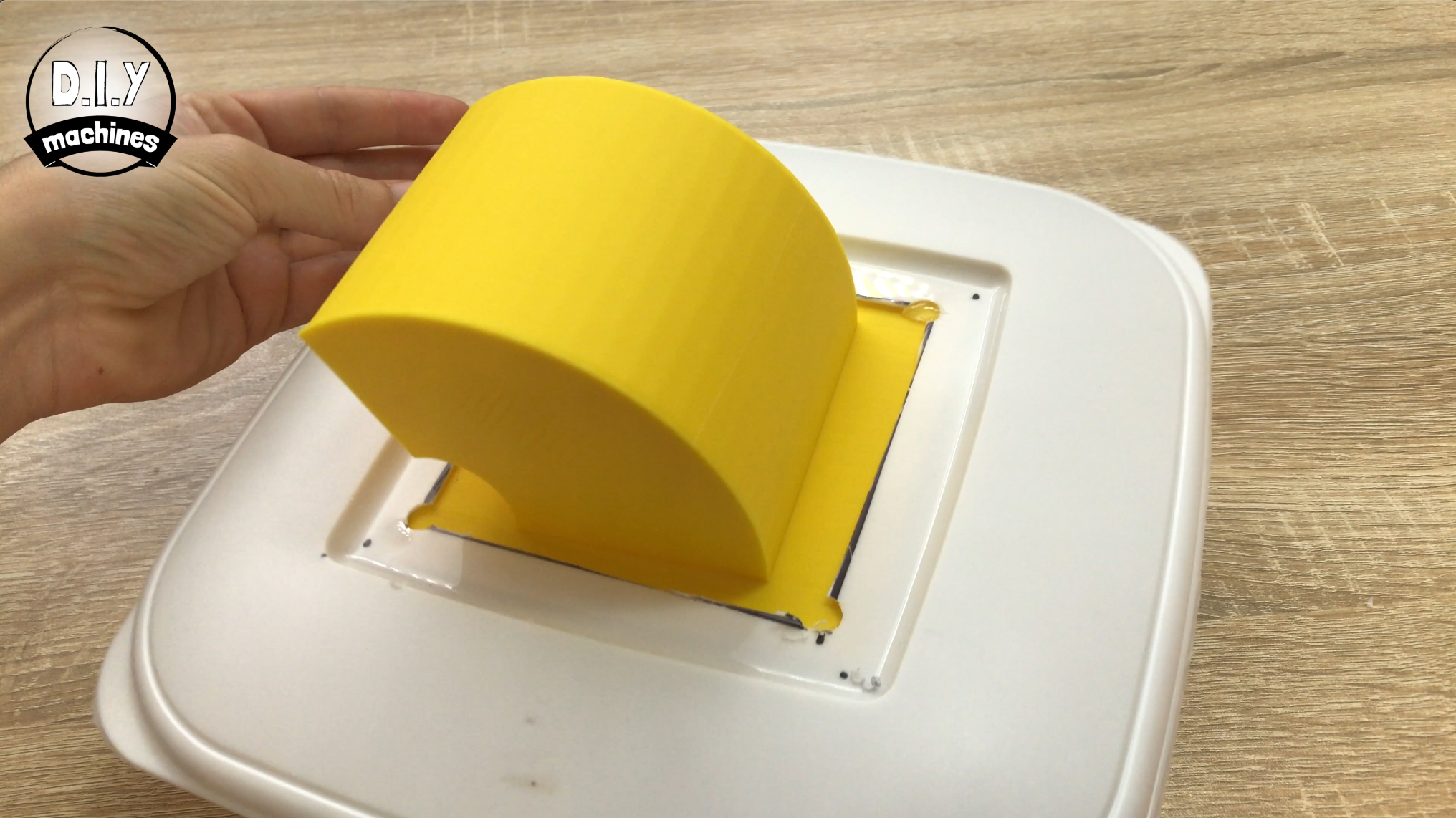
แกะ support ออก แล้วทากาวร้อนรอบๆ ขอบด้านบน จากนั้นสอดผ่านรูในฝาจากด้านล่างขึ้นมา
เสร็จแล้วสำหรับ Nozzle นี้ ผมบอกแล้วว่ามันง่ายสุดๆ :)
สำหรับขั้นตอนนี้คุณต้องมี:





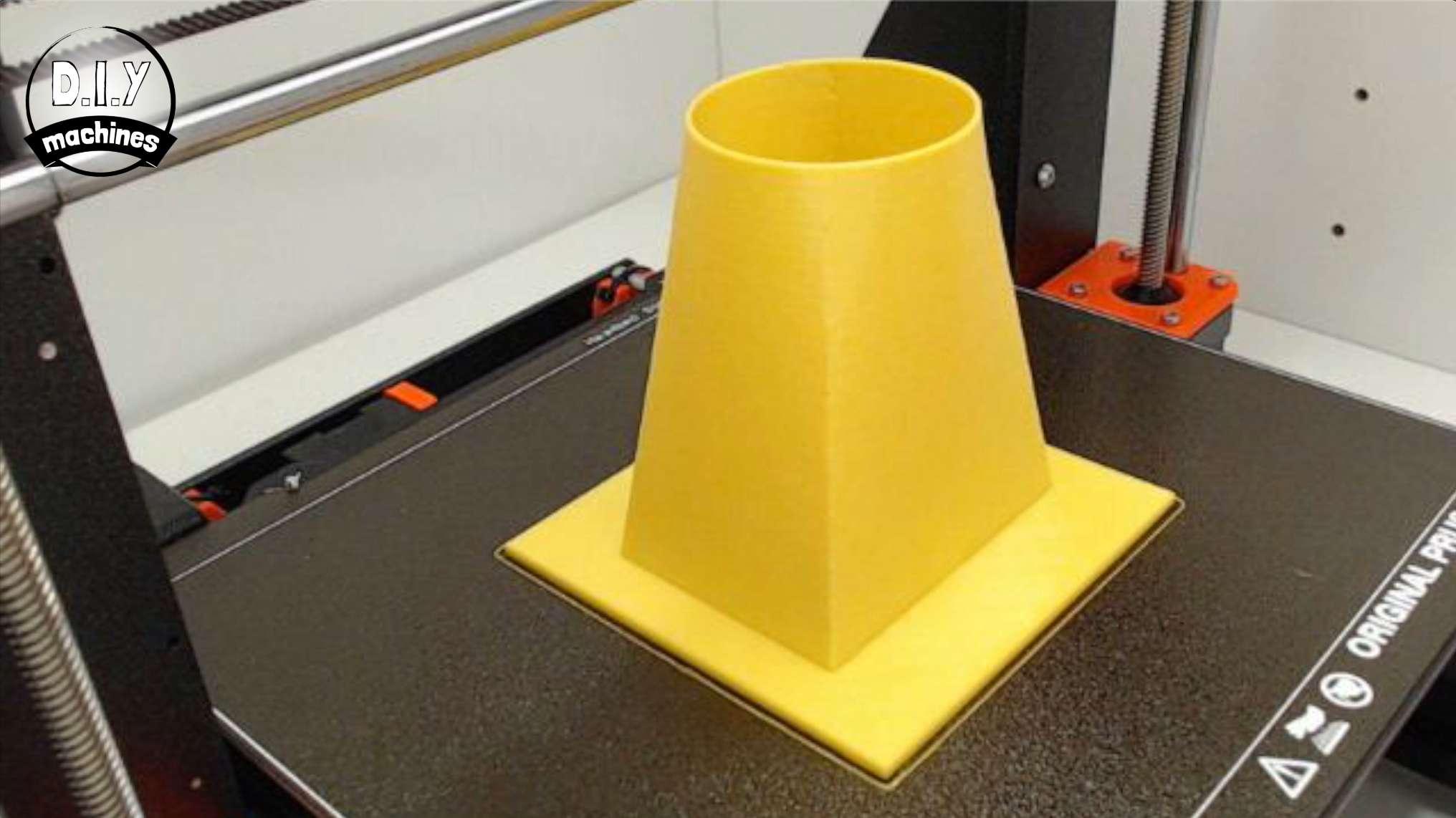
หากคุณยังไม่ได้พิมพ์ชิ้นส่วนสำหรับ Nozzle นี้ ให้พิมพ์เลยครับ คราวนี้ผมพิมพ์แบบแนวตั้งโดยไม่ต้องใช้ support หรือ brim ใดๆ
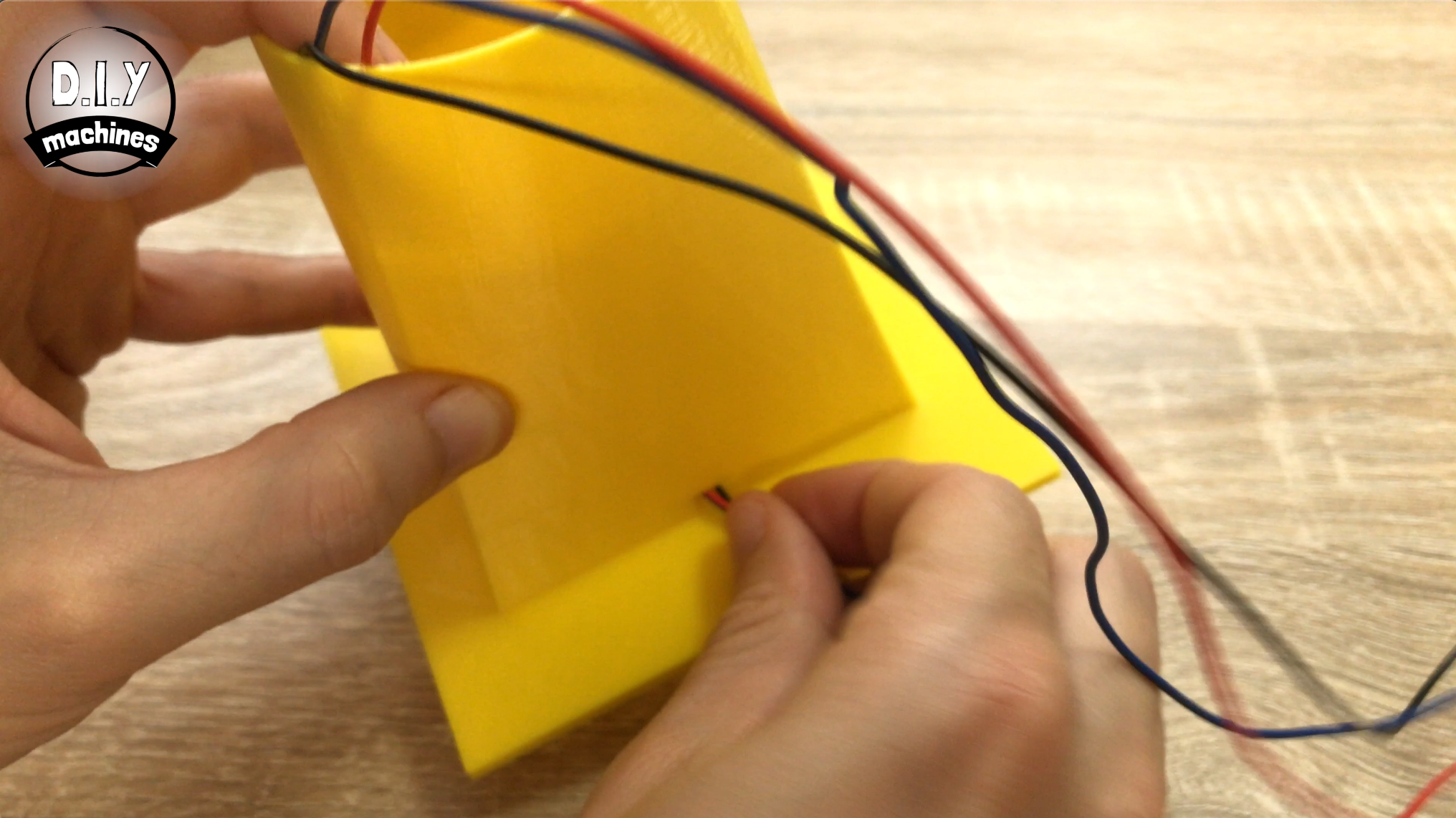
บัดกรีสายไฟความยาวพอประมาณ (ผมใช้ยาว 40 ซม. แล้วค่อยเล็มสั้นลงทีหลังเมื่อรู้ระยะที่แน่นอนถึง Arduino Nano) เข้ากับ Pin ดังต่อไปนี้:
สอดสายทั้งสามเส้นลงผ่านด้านบนของ Nozzle แล้วย้อนออกมาทางรูเล็กๆ ที่ด้านล่างของชิ้นงาน ทากาวร้อนหรือวัสดุที่คล้ายกันที่ด้านหลังของ LEDs แล้วกดลงไปในจุดยึดให้แน่นตามที่แสดงด้านบน
เมื่อเสร็จแล้ว ให้หยอดกาวอีก 'จุด' ตรงที่สายไฟลอดจากด้านในออกมาด้านนอก เพื่อป้องกันไม่ให้หมอกพ่นออกมาทางรูนี้ คุณยังสามารถใช้เทปพันสายไฟรวมสายเข้าด้วยกันเพื่อให้ดูเรียบร้อย
เช่นเดียวกับก่อนหน้านี้ ให้ทากาวร้อนรอบๆ ด้านบนของชิ้นงานแล้วสอดผ่านรูในฝาจากด้านล่าง ตรวจสอบให้แน่ใจว่าสายไฟสำหรับ LEDs อยู่ที่ด้านบนของฝาด้วย
ปิดฝาเข้ากับด้านบนของ Container และเดินสายไฟลงมาทางด้านซ้ายของ Battery Holder สายไฟที่มาจาก Digital in ของ LEDs ให้เชื่อมต่อกับ Pin D6 บน Arduino, VCC ต่อกับ 5V และ GND ต่อกับ Pin Ground
สำหรับขั้นตอนนี้ให้เตรียม:
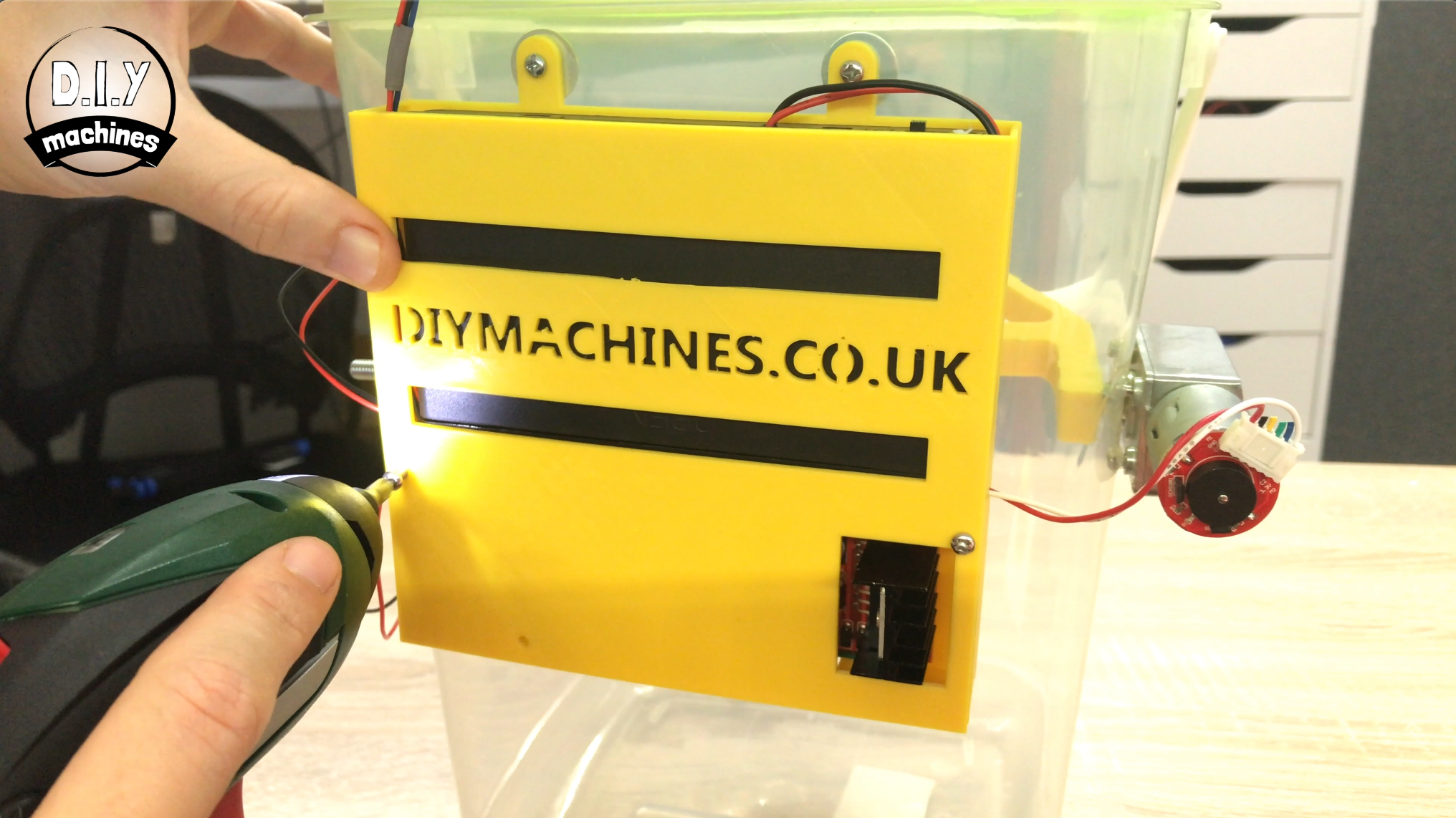
ผมพิมพ์ฝาครอบนี้ที่ layer height 0.2mm ไม่ต้องใช้ support และไม่ต้องใช้ brim
ตอนนี้เราสามารถประกอบฝาครอบเข้ากับ Electronics Housing ได้แล้ว
ใช้น็อต M3 x 6 สามตัวเพื่อยึดฝาครอบให้เข้าที่
ในการเชื่อมต่อกับเครื่องทำ dry ice ผ่าน Bluetooth คุณต้องดาวน์โหลด App ลงในโทรศัพท์ของคุณ ผมใช้อุปกรณ์ Apple และดาวน์โหลด App ชื่อ 'HM10 Bluetooth Serial' หากคุณยังไม่มี App ให้ลองค้นหาใน App Store ด้วยคำว่า 'HM10 Bluetooth' และคุณน่าจะพบสิ่งที่สามารถส่งคำสั่ง Serial ผ่าน Bluetooth ไปยัง Arduino ของคุณได้
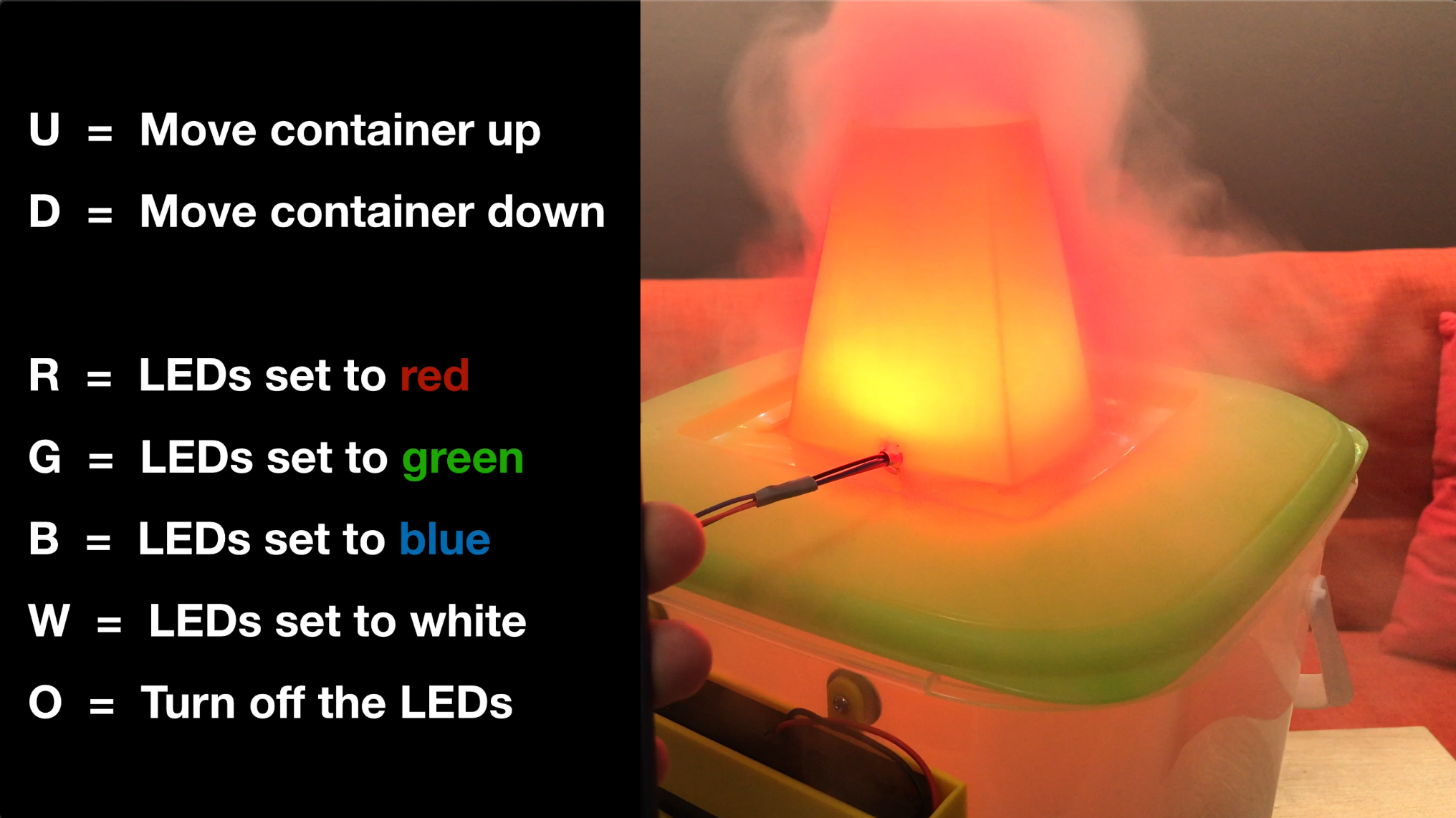
คุณแค่ต้องส่งตัวอักษรภาษาอังกฤษตัวพิมพ์ใหญ่ตัวเดียวสำหรับแต่ละคำสั่ง
และสำหรับการควบคุม LEDs คุณสามารถส่ง
สำหรับขั้นตอนนี้ให้เตรียม:
ใส่น้ำร้อนปริมาณมาก (แต่ไม่ถึงกับเดือด) ลงที่ก้น Container จากนั้นค่อยๆ ใส่ dry ice ลงในที่ใส่เครื่องเขียนอย่างระมัดระวัง
ปิดฝาที่มี Nozzle ที่คุณเลือกไว้ แล้วเชื่อมต่อกับเครื่องทำ dry ice เครื่องใหม่ผ่าน Bluetooth ในโทรศัพท์ของคุณ
เมื่อเชื่อมต่อแล้ว คุณสามารถส่งตัวอักษรตัวพิมพ์ใหญ่เพียงตัวเดียวเพื่อควบคุมมัน นี่คือสรุปคำสั่งอีกครั้ง:
ส่ง 'U' เพื่อเลื่อนตะกร้าขึ้น ส่ง 'D' เพื่อเลื่อนตะกร้าลง
จากนั้นเพื่อควบคุม LEDs คุณสามารถส่ง 'R' สำหรับสีแดง, 'B' สำหรับสีน้ำเงิน, 'G' สำหรับสีเขียว, 'W' สำหรับสีขาว หรือ 'O' เพื่อปิดไฟ
ขอให้สนุกและดูแลตัวเองให้ดีขณะหยิบจับ dry ice ด้วยนะครับ :)
ขอบคุณที่เข้ามารับชมคู่มือของผม ผมหวังว่าคุณจะสนุกกับโปรเจกต์นี้ หากคุณชอบ โปรดลองเข้าไปชมโปรเจกต์อื่นๆ ของผม อย่าลืมกด Subscribe ให้กับ DIY Machines ทั้งที่นี่และบน YouTube และแชร์โปรเจกต์นี้กับใครก็ตามที่คุณคิดว่าเขาอาจอยากสร้างมันขึ้นมาเอง
แล้วพบกันใหม่โอกาสหน้า สำหรับตอนนี้ลาก่อนครับ!
Subscribe ช่อง YouTube ของผม: https://www.youtube.com/channel/UC3jc4X-kEq-dEDYh...
สนับสนุนผมทาง Patreon: https://www.patreon.com/diymachines
Facebook: https://www.facebook.com/diymachines
สนับสนุนเพื่อรับ Source Code หรือแอปพลิเคชันสำหรับโปรเจกต์นี้
