Expert
โปรเจกต์ EscoriaBot
EscoriaBot คือ Robot ที่สร้างขึ้นจากวัสดุรีไซเคิลและ Electronics ของ Arduino

EscoriaBot คือ Robot ที่สร้างขึ้นจากวัสดุรีไซเคิลและ Electronics ของ Arduino
▶ กดเพื่อดูวิดีโอสาธิตโปรเจกต์
ตั้งแต่ที่ผมเห็น R2-D2 เมื่อกว่า 40 ปีก่อนในตอนเด็ก ผมก็อยากจะมีหุ่นยนต์เป็นของตัวเองมาโดยตลอด
แต่มีอุปสรรคชิ้นใหญ่อยู่ระหว่างผมกับความฝัน นั่นก็คือเรื่อง Electronics และปัญหานี้ก็ติดตัวผมมาอีกหลายปี
ในฐานะผู้ใช้งานและผู้สนับสนุนซอฟต์แวร์เสรี ผมเคยได้ยินชื่อ Arduino มาก่อน แต่มันดูเหมือนจะยากเกินไปสำหรับผม จนกระทั่ง Gustavo เพื่อนของผมช่วยเลือกชุดคิทชุดแรกให้
ผมประกอบมันเข้าด้วยกันและทำต่อมาเรื่อยๆ
ผมไม่ค่อยชอบ Chassis เพราะมันมักจะติดอุปสรรคต่างๆ ผมเลยตัดสินใจสร้าง Chassis ของตัวเองขึ้นมา ซึ่งมันก็ได้ผลดีแต่ผมอยากได้อะไรที่ทรงพลังมากกว่านั้น
ผมจึงเริ่มหาทางเลือกอื่นและทำการวิจัย จนได้ไปเจอช่อง YouTube หลายช่อง เช่น The Post Apocalyptic Inventor หรือ Espacio de César ซึ่งทำให้ผมตระหนักได้ว่า ผมสามารถนำอุปกรณ์ที่ถูกทิ้งแล้วมาใช้ประโยชน์ได้ และยังช่วยให้โลกสะอาดขึ้นได้อีกด้วย
ผมเริ่มหา Gadgets ทุกประเภทที่ผมพอจะแกะเอาชิ้นส่วนออกมาได้
ผมเริ่มจากการรีไซเคิลมอเตอร์จากเครื่องพิมพ์ และยิ่งผมเรียนรู้มากขึ้น ผมก็เก็บกู้ชิ้นส่วนต่างๆ ได้มากขึ้นเรื่อยๆ
ทุกวันนี้ผมรื้ออุปกรณ์ทุกชนิดและนำชิ้นส่วนต่างๆ มาใช้ประโยชน์ได้มากมาย เช่น Gears, Gearboxes, LEDs, Capacitors, Resistors และอื่นๆ
ในที่สุดผมก็ทำออกมาสองเวอร์ชัน คือหุ่นยนต์แบบ Caterpillar ขนาดยาว 60 ซม. กว้าง 37 ซม. ชื่อว่า EscoriaBot และอีกตัวที่ขนาดเล็กกว่าคือ 36 ซม. x 25 ซม. ชื่อว่า BotSura
มันทำมาจากพลาสติกป้ายโฆษณารีไซเคิล ผมไม่แน่ใจว่าเป็นพลาสติกชนิดไหนแต่มันดูเหมือนโฟมที่มีความหนาแน่นสูงมาก อย่างไรก็ตาม มันสามารถสร้างขึ้นจากวัสดุทั่วไปหรือพลาสติกรีไซเคิลชนิดใดก็ได้
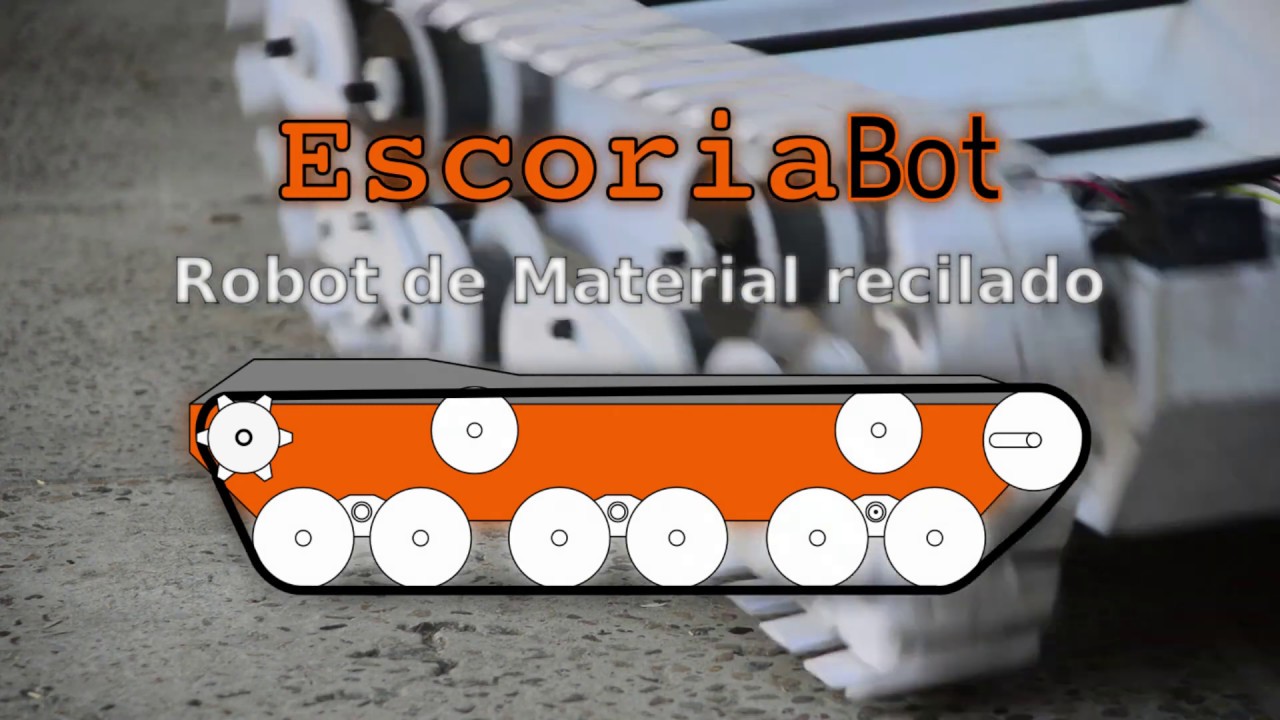
แบบแปลนของหุ่นยนต์ แบบนี้เขียนขึ้นใน Inkscape ตามสเกลของหุ่นยนต์ตัวจริงแต่สามารถปรับขนาดได้ง่าย
https://drive.google.com/file/d/1gIeu_Nfqf8OKlPs3iF4hUQFp0k1Tc_Qh/view?usp=sharing
Repository
https://github.com/EstebanJPagano/EscoriaBot
เรื่องราวในภาษาสเปน

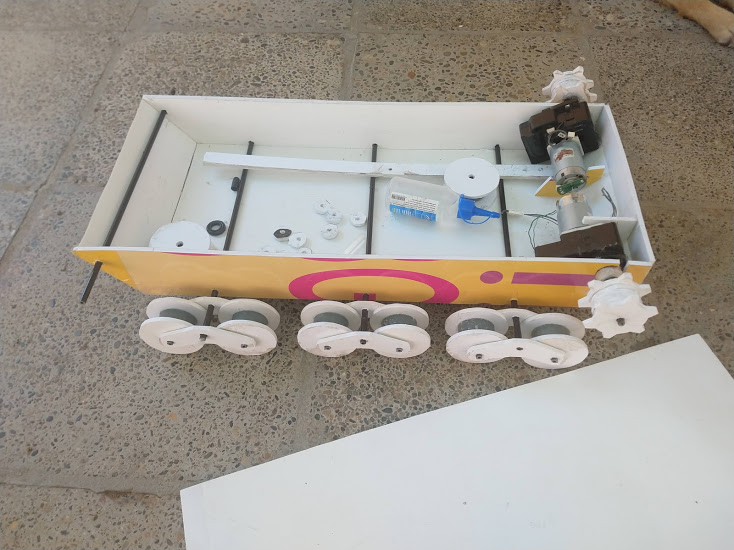
Chassis มีขนาดใหญ่เพื่อให้สามารถติดตั้งอุปกรณ์ต่างๆ ไว้ด้านบนได้
มันเป็นกล่องที่มีส่วนปลายทำมุมเอียงซึ่งช่วยในการข้ามผ่านอุปสรรคต่างๆ
เป็นไอเดียที่ดีที่จะเจาะรูก่อนทำการตัด หากคุณตัดสินใจเรื่องการออกแบบไว้เรียบร้อยแล้ว

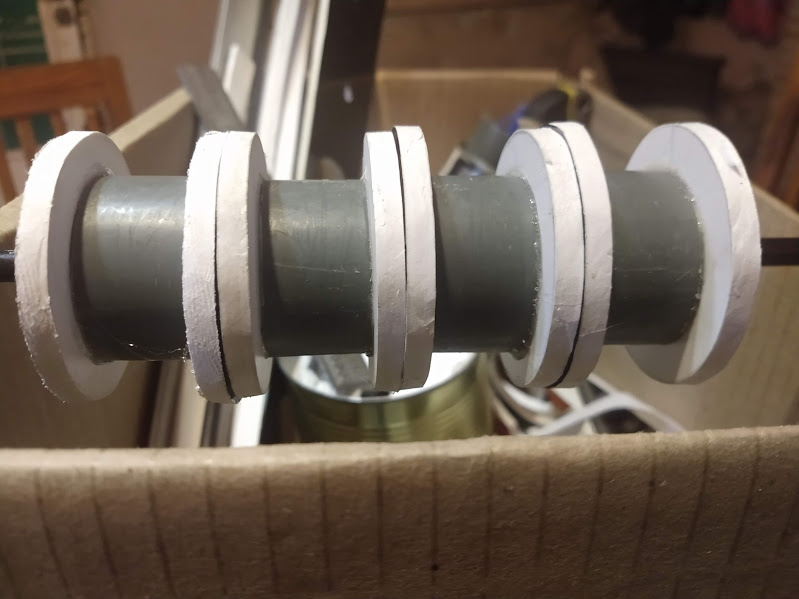
ล้อทำมาจากวงกลมสองแผ่นเชื่อมต่อกันด้วยชิ้นส่วนท่อที่มีเส้นผ่านศูนย์กลางขนาดเล็กกว่าไว้ตรงกลาง แล้วติดกาวเข้าด้วยกันด้วยซิลิโคน
ในกรณีของผม ทุกอย่างถูกตัดด้วยคัตเตอร์และเจาะรู ดังนั้นมันจึงไม่ได้แม่นยำมากนัก แต่ผมก็ตระหนักได้ว่าพวกมันไม่จำเป็นต้องสมบูรณ์แบบก็สามารถทำงานได้ดี
เพื่อให้แน่ใจว่าล้อตรง ผมจึงนำมันไปเสียบไว้บนแท่งไฟเบอร์กลาสที่รีไซเคิลมาจากเต็นท์ที่พังแล้วและลองหมุนดู เนื่องจากซิลิโคนยังพอปรับแก้ได้ ผมจึงใช้เพื่อให้แน่ใจว่ามันหมุนได้สมบูรณ์แบบที่สุดเท่าที่จะทำได้
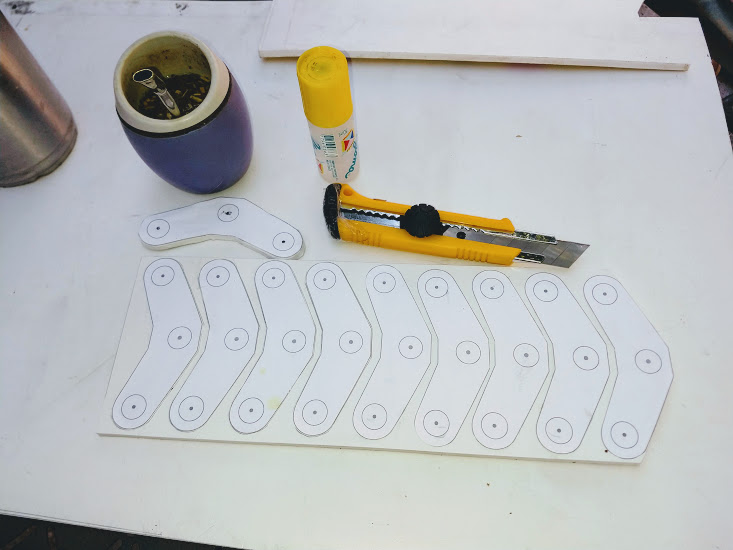
จากนั้นออกแบบ Bogies โดยอ้างอิงจากการออกแบบของรถถัง Sherman ซึ่งช่วยให้ล้อปรับตัวเข้ากับสภาพภูมิประเทศและข้ามผ่านอุปสรรคได้ดีขึ้น
สำหรับขั้นตอนนี้ ผมพิมพ์ลวดลายที่ปรากฏในแบบแปลนออกมา จากนั้นก็ตัดและแปะลงบนพลาสติกเพื่อทำการตัด
แน่นอนว่าการใช้ CNC จะทำให้ทุกอย่างง่ายขึ้นมาก แต่ผมยังไม่มี (ในตอนนี้) และผมก็ยังชอบที่จะทำสิ่งต่างๆ ด้วยมือตัวเองอยู่
จากนั้นผมประกอบ Bogies โดยใช้แท่งไฟเบอร์กลาสเป็น Axles
เพื่อจัดแนวล้อ ผมตัดสินใจร้อยแท่งไฟเบอร์กลาสทะลุผ่าน Chassis ทั้งหมดเพื่อให้แน่ใจว่าทุกอย่างอยู่ในแนวเดียวกัน และยังเป็นการเพิ่มความแข็งแรงให้กับ Chassis อีกด้วย

คราวนี้มาถึงส่วนที่ซับซ้อน
ในอดีตผมเคยทำสายพานที่ Drive wheel ทำงานโดยอาศัยการเสียดสีกับสายพาน แต่นี่ไม่ใช่แนวทางที่รถแบบตีนตะขาบใช้กัน และไม่ใช่ทางเลือกที่ดีที่สุดด้วย เพราะมันสูญเสียกำลังไปกับแรงเสียดทานและมักจะเกิดอาการหมุนฟรี
ผมจึงออกแบบสายพานที่ง่ายกว่าของรถถังและทำด้วยมือได้ง่าย โดยทำจากแผ่นพลาสติกที่ขบเข้ากับ Gears ได้พอดี

เมื่อออกแบบและตัด Gears เสร็จแล้ว ผมก็วัดระยะห่างระหว่างเฟืองและตัดแผ่นพลาสติกที่จะใช้เป็น Links เมื่อพอใจแล้วผมก็ประกอบมันเข้าด้วยกันโดยการทากาวติดชิ้นส่วนลงบนแถบผ้าที่ใช้เชื่อมต่อ Links เข้าด้วยกัน
เมื่อผมแปะชิ้นส่วนแรกๆ ลงไป ผมก็ได้ระยะห่างระหว่าง Links และใช้ระยะนี้ทำ Separator เพื่อให้แน่ใจว่าระยะห่างจะเท่ากันเสมอ
ผมยังวัดและติดชิ้นส่วนตรงกลางเพื่อช่วยให้สายพานอยู่ในแนวร่องของล้อ ซึ่งสำคัญมากเพื่อให้แน่ใจว่าสายพานจะไม่หลุด โดยขอบทุกด้านจะถูกลบมุมเพื่อให้เข้าล็อกได้พอดี
อีกปัญหาหนึ่งคือสายพานสูญเสียแรงตึง สั่นมาก และมักจะหลุดออกมาโดยเฉพาะเวลาเลี้ยวถอยหลัง
นั่นคือสาเหตุที่ผมติดตั้งล้ออีกสองล้อไว้ด้านบนของ Chassis เพื่อไม่ให้สายพานหย่อนลงไป
ผมยังได้ทำร่องบน Chassis ตรงจุดที่วางแกนล้อหน้า ซึ่งช่วยให้สามารถปรับแรงตึงแกนล้อได้โดยใช้หนังยางสองเส้น ด้วยวิธีนี้ผมจึงสามารถลดปัญหาการสั่นสะเทือนให้น้อยลงได้
ผมยังเพิ่มแถบผ้าอีกสองแถบที่ด้านนอกและด้านในของสายพาน ซึ่งทำให้มันแข็งแรงขึ้นและขบกับ Sprocket ได้ดีขึ้นและจะไม่หลุดออกมา

สุดท้ายผมก็ได้ติดตั้ง Electronics ซึ่งประกอบด้วย Arduino Mega พร้อมกับ Module Bluetooth รุ่น HC-05 และ L298N
ผมเป็นผู้ใช้ภาษาสเปน และผมแปลบทความนี้ด้วย Google translate
สนับสนุนเพื่อรับ Source Code หรือแอปพลิเคชันสำหรับโปรเจกต์นี้
