Easy
โปรเจกต์ 'Gesture Bot' ด้วย Hand Gestures
Robotic Hand ขนาดเท่าของจริงที่เรียบง่าย พร้อมสำหรับการทำ Custom programming

Robotic Hand ขนาดเท่าของจริงที่เรียบง่าย พร้อมสำหรับการทำ Custom programming

▶ กดเพื่อดูวิดีโอสาธิตโปรเจกต์
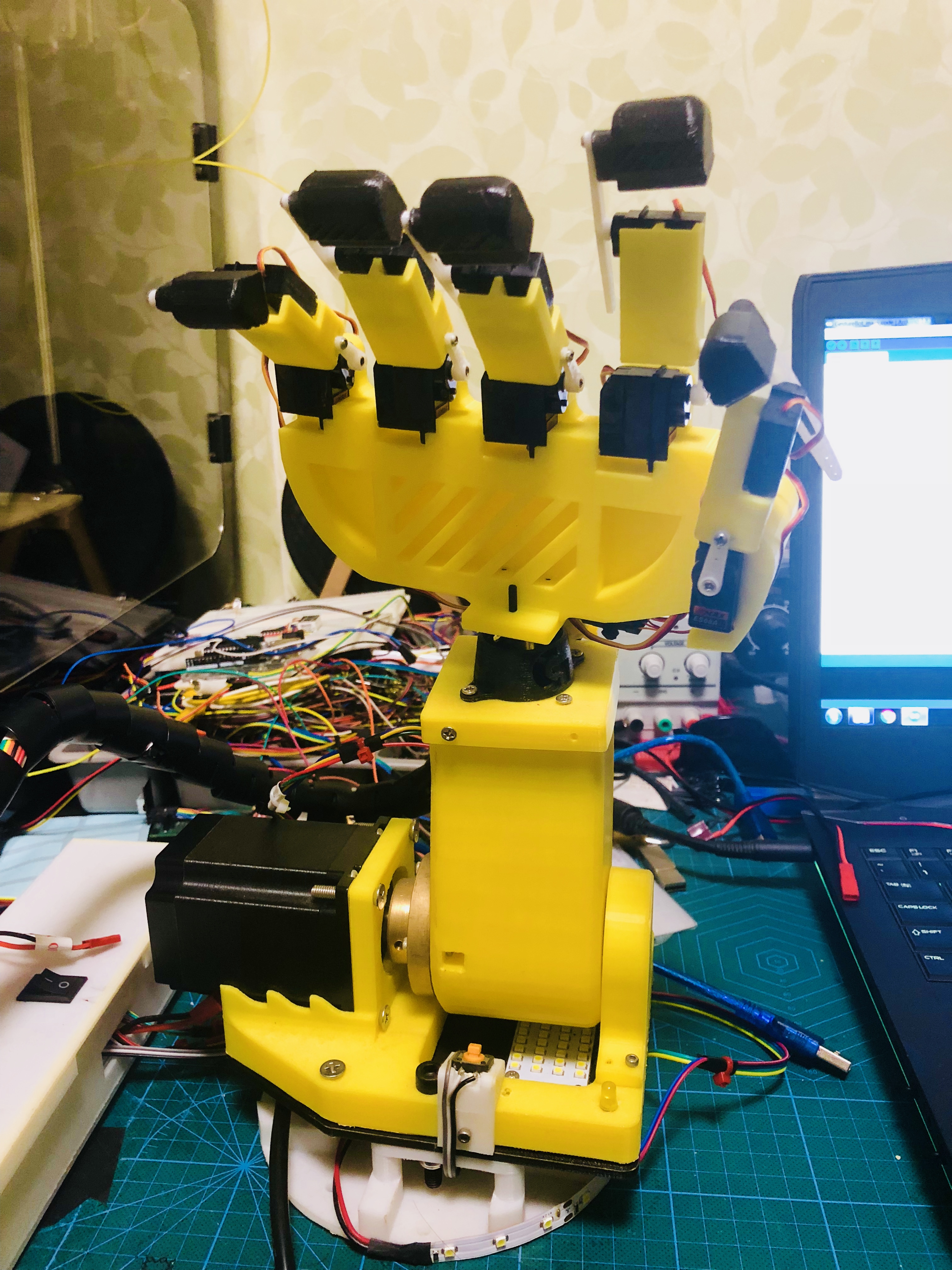
Gesture Bot คือหุ่นยนต์มือกลขนาดเท่าของจริงที่เรียบง่ายแต่สามารถเลียนแบบท่าทางของมือได้ โดยสามารถเขียนโปรแกรมปรับแต่งเพื่อให้แสดงท่าทางมือต่างๆ ได้ตามต้องการ
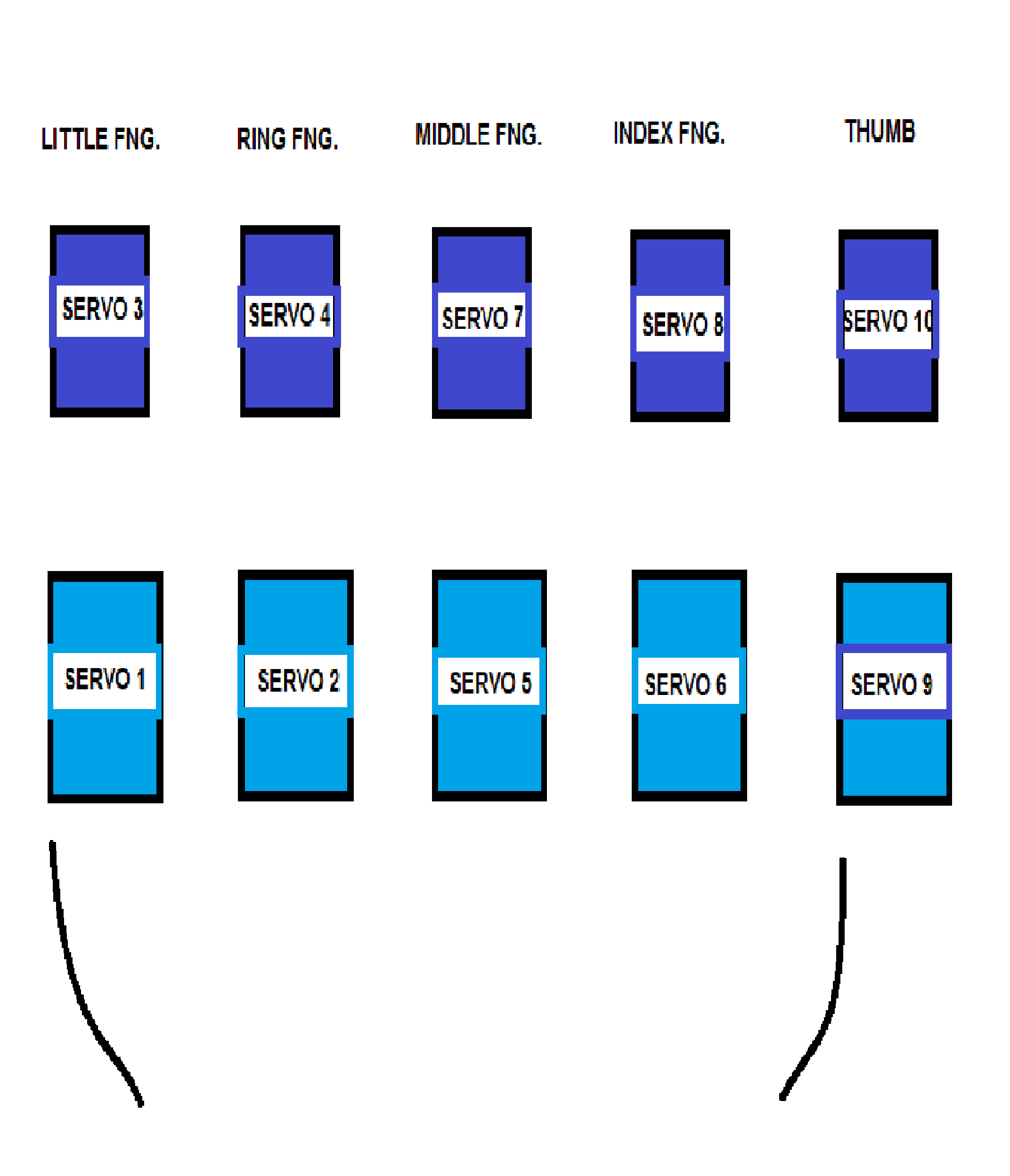
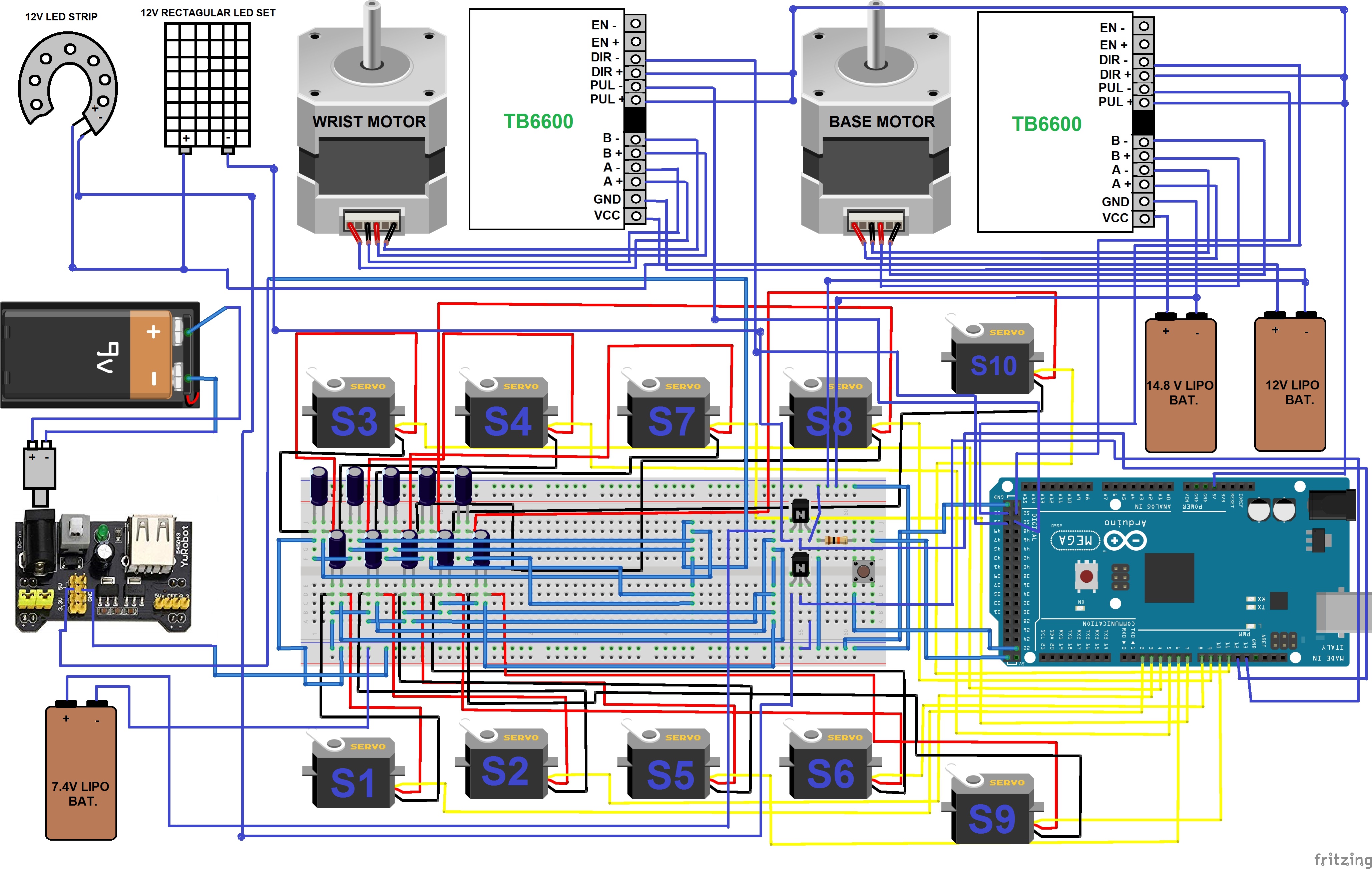
กลไกของมือขับเคลื่อนด้วย Servo 10 ตัวที่ใช้สำหรับจุดหมุนของนิ้วมือ และ Stepper Motor 2 ตัวที่ควบคุมการเคลื่อนไหวของข้อมือและการเคลื่อนไหวของแขนส่วนฐาน หัวใจหลักของกล่องควบคุมคือ Arduino Mega ซึ่งทำหน้าที่ควบคุมระบบอิเล็กทรอนิกส์ทั้งหมด
ในตอนนี้ผมใช้คำสั่ง Serial ในการควบคุมหุ่นยนต์มือกล แม้ว่าจะสามารถเพิ่มฟีเจอร์อื่นๆ เข้าไปได้อีกมาก เช่น การออกแบบแผงควบคุมที่ส่งข้อมูล Feedback กลับมา ซึ่งทำได้ง่ายด้วย Analog Pins จำนวนมากของ Arduino Mega
ถึงแม้ว่าฟังก์ชันทั้งหมดของมือจะทำงานได้ดี แต่ผมเชื่อว่าการออกแบบยังมีข้อด้อยในเรื่องความสวยงาม และหากสามารถเพิ่ม Degrees of Freedom ในการเคลื่อนที่ของจุดหมุนได้ มันจะทำงานได้เหมือนมือจริงมากยิ่งขึ้นอย่างแน่นอน
ผมได้แบ่งการสร้างออกเป็น 4 ส่วนหลักเพื่อให้ง่ายต่อการอธิบาย ได้แก่ ส่วน Base, ส่วน Arm, ส่วน Hand และส่วน Control Box


THE BASE
ชุดฐานประกอบด้วยโครงสร้างส่วนบนและส่วนล่าง โครงสร้างส่วนบนเป็นที่อยู่ของ Stepper Motor ที่ใช้เคลื่อนย้ายแขน โดยโครงสร้างส่วนบนเชื่อมต่อกับโครงสร้างส่วนล่างด้วยแผ่นเพลทที่ยึดน็อตเข้าด้วยกัน ชุด LED ทรงสี่เหลี่ยมขนาด 12V ถูกติดตั้งไว้ใต้แขนบนโครงสร้างส่วนบน โครงสร้างส่วนล่างมีพื้นที่ผิวเพียงพอที่จะกระจายน้ำหนักของมือทั้งหมด
LED strip ขนาด 12V อีกเส้นวางอยู่รอบเส้นรอบวงของโครงสร้างส่วนล่าง ตัว Base Stepper Motor เชื่อมต่อกับ Arm ด้วย Coupling Flange และแขนจะถูกยึดให้อยู่ในตำแหน่งด้วย Bearing ที่ยึดจากด้านตรงข้าม ตัวเรือน Bearing ถูกยึดเข้ากับโครงสร้างส่วนบนของชุดฐาน
สุดท้ายมีการติดตั้ง Push Button ไว้ที่โครงสร้างส่วนบนเพื่อทำหน้าที่เป็น Kill Switch เพื่อหยุดการเคลื่อนไหวและสั่งให้ถอยกลับตามจำนวน Step ที่กำหนดเพื่อให้มืออยู่ในตำแหน่งที่แน่นอน ทางเลือกที่ดีกว่าคือการติดตั้ง POT บนแกนของ Base Stepper Motor เพื่อรับ Feedback ของตำแหน่งปัจจุบันของ Stepper Motor แต่ในตอนนี้ผมปล่อยไว้อย่างนี้ก่อน
THE ARM
ส่วนแขนถูกพิมพ์ด้วยเครื่องพิมพ์ 3D เป็นชิ้นเดียวและมีช่องด้านบนสำหรับใส่ Wrist Stepper Motor ตัวแขนถูกวางในตำแหน่งโดยได้รับการรองรับจาก Bearing และ Coupling Flange ที่เชื่อมต่อแกนของ Base Stepper Motor เข้ากับแขน
หลังจากติดตั้ง Wrist Stepper Motor ในแขนแล้ว จะปิดด้วยฝาปิด ส่วนแกนของ Wrist Stepper Motor และ Coupling Flange จะถูกซ่อนด้วย Collar ที่ยึดอยู่ในตำแหน่งใต้ชุดมือ
THE HAND
ชุดมือประกอบด้วยโครงสร้างฐานของมือและชุดนิ้วมือ โครงสร้างฐานของมือเป็นที่อยู่ของ Servo (17g) ด้านล่าง 5 ตัว ซึ่งทำหน้าที่เป็นจุดหมุนของข้อต่อนิ้วส่วนล่าง ชุดนิ้วมือส่วนใหญ่มีโครงสร้างขนาดเล็กที่รองรับ Servo (4.1g) ด้านบน ซึ่งทำหน้าที่เป็นจุดหมุนด้านบนของนิ้วมือ
สายไฟของ Servo ถูกติดกาวไว้โดยเผื่อระยะให้หย่อนเล็กน้อยเพื่อให้สะดวกต่อการเคลื่อนไหวของโครงสร้างมือขนาดเล็ก ข้อต่อของนิ้วทำจาก Servo Horn ขนาดเล็กที่มาพร้อมกับ Servo Motor
THE CONTROL BOX
Control Box เป็นที่อยู่ของ Stepper Motor Driver รุ่น TB6600 สองตัว, Breadboard สำหรับการเชื่อมต่อ, Breadboard Power Supply และบอร์ดไมโครคอนโทรลเลอร์ Arduino Mega ที่ควบคุมการเคลื่อนไหวทั้งหมดของหุ่นยนต์มือกล ผมรู้ว่า TB6600 นั้นเกินความจำเป็นไปนิดสำหรับ Stepper Motor รุ่น NEMA 17 แต่พอดีผมมีเหลืออยู่ตัวหนึ่งและมันใส่ในกล่องควบคุมได้พอดีผมจึงตัดสินใจเลือกใช้มัน ผมคิดว่ากล่องควบคุมสามารถทำให้เล็กลงได้โดยการเปลี่ยน TB6600 ตัวหนึ่งเป็น Driver รุ่น A4988
สวิตช์ On/Off สามตัวที่ด้านบนของกล่องควบคุมใช้สำหรับเปิดปิดแบตเตอรี่ขนาด 14.8V, 12V และ 7.4V ตามลำดับ ที่ผมทำเช่นนี้เพราะมันง่ายต่อการทดสอบส่วนต่างๆ ของมือโดยการตัดไฟในส่วนที่ไม่เกี่ยวข้องกับการทดสอบ และผมคิดว่านี่เป็นวิธีป้องกันที่ดีเมื่อเล่นกับชุดจ่ายไฟ DC แรงดันสูง
POWER MANAGEMENT
POSSIBLE FUTURE DEVELOPMENTS
สนับสนุนเพื่อรับ Source Code หรือแอปพลิเคชันสำหรับโปรเจกต์นี้
ประเมิน Project
เอาฟอร์มยาวออกจากท้ายหน้า Project แล้ว เหลือเป็นปุ่มให้กดไปกรอกหน้าเดียว ตัวใหญ่ เว้นบรรทัดเยอะ อ่านง่ายกว่า
รีวิวจากคนใช้งานจริง
ถ้าเคยสั่งงาน เคยอ่านหน้านี้แล้วได้ประโยชน์ หรือมีข้อเสนอแนะ ฝากรีวิวไว้ได้เลย
ยังไม่มีรีวิวบนหน้านี้ ถ้าเคยใช้งานหรือมีข้อเสนอแนะ เขียนเป็นคนแรกได้เลย
