Hard
โปรเจกต์ Hank the Hexapod
Hank คือ work in progress ที่พัฒนาขึ้นในระหว่างการเดินทาง 4 เดือน นี่คือเวอร์ชันเก่าของโปรเจกต์ก่อนหน้าที่ผมลืมเปิดให้เป็น public

Hank คือ work in progress ที่พัฒนาขึ้นในระหว่างการเดินทาง 4 เดือน นี่คือเวอร์ชันเก่าของโปรเจกต์ก่อนหน้าที่ผมลืมเปิดให้เป็น public

▶ กดเพื่อดูวิดีโอสาธิตโปรเจกต์
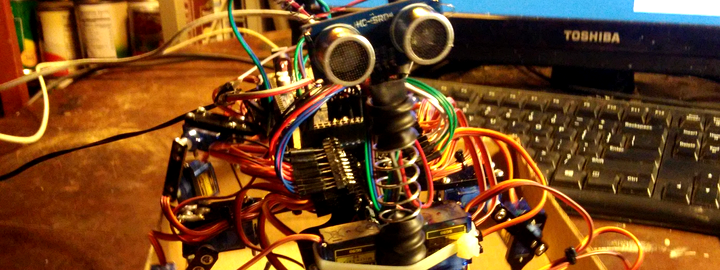
Mega Bread Project #7, Hank The Hexabot คือหุ่นยนต์ 6 ขาที่ใช้ 18 Servo โปรเจกต์นี้มีการอัปเดต Code, รูปภาพ และวิดีโอแล้ว
พบกับ Hank เขาคือ Bot หมายเลข 1 จากซีรีส์ MEGA BREAD ซึ่งเป็นซีรีส์ลำดับที่ 7 ของพวกเรา คุณสามารถหาชิ้นส่วนฐานได้จาก ที่นี่ นอกจากนี้คุณยังต้องใช้ 18 Servo, Mega2560 และ Ultrasonic distance sensor
สำหรับ Code ควบคุม Servo พื้นฐาน (www.lamja.com) ผมยังไม่ได้นำมาใช้งานจริง นี่คือลิงก์ YouTube สำหรับ Sketch ควบคุม Servo หลายตัวที่สมบูรณ์แบบ ซึ่งรองรับการขยายได้ถึง 30 Servo และ Motor พร้อมกับรับข้อมูลจาก Sensor ต่างๆ ผมหาอย่างอื่นไม่เจอเลย นอกจากของไร้สาระที่บังคับให้คุณต้องซื้อ Board ใหม่ ซึ่งผมจะไม่ทำแบบนั้นแน่นอน
ตอนนี้เรายังคงสร้าง "MEGA BREAD - Hank The Hexapod" อยู่ โปรเจกต์นี้ริเริ่มโดยตัวผมเองและลูกชาย ปีหน้าเขาจะเริ่มเรียนวิชาหุ่นยนต์ตอนอยู่เกรด 11 (ม.5) ปีนี้เขาเรียนดีจนติดทำเนียบเกียรติยศ และผมอยากเห็นว่าเด็กคนนี้จะทำอะไรได้บ้าง
แผนคือการสร้างลำดับเหตุการณ์ที่จะเกิดขึ้น: เริ่มจากการรับข้อมูลจาก Pilot/Navigator เพื่อกำหนดพิกัด GPS ปลายทาง จากนั้นจึงขนส่ง Hexapod ทางอากาศเพื่อไปวางลงในตำแหน่งที่กำหนด ทำการค้นหา/กำจัดเป้าหมาย และเก็บกู้กลับคืนโดยโปรเจกต์ Quadcopter เดียวกัน ทั้ง Hexapod และ Quadcopter คาดว่าจะติดตั้ง Camera, Bluetooth link, RF link, GPS navigation, Ultrasonic distance sensors และ Pressure switches ทั้งที่เท้าของ Hexapod และใต้ท้องของ Quadcopter
เรายังสร้างอุปกรณ์ Red dot laser จากเลเซอร์พกพาราคาถูก อุปกรณ์เหล่านี้จะถูกใช้เพื่อนำทาง (Homing), เล็งเป้า และเก็บข้อมูลระยะทาง อ้อ แล้วยังมี 6-way Gyro ในแต่ละตัวด้วย อาวุธจะถูกติดตั้งบน Turret แบบ 3 Servo พร้อม Camera โดยจะติดตั้งตัวป้อนและยิงกระสุน AirSoft อัตโนมัติที่ดัดแปลงมาให้ยิงได้ 1,500 นัดต่อนาทีที่ความเร็ว 750 FPS ส่วนนี้แหละที่ทำให้ผมตื่นเต้นสุดๆ
แนวคิด:
ว้าว พอมาลองสรุปดูแล้วเรายังมีงานต้องทำอีกไกล แต่เราจะทำให้สำเร็จ
สนับสนุนเพื่อรับ Source Code หรือแอปพลิเคชันสำหรับโปรเจกต์นี้
