Expert
โปรเจกต์ Jenny 5 Robot
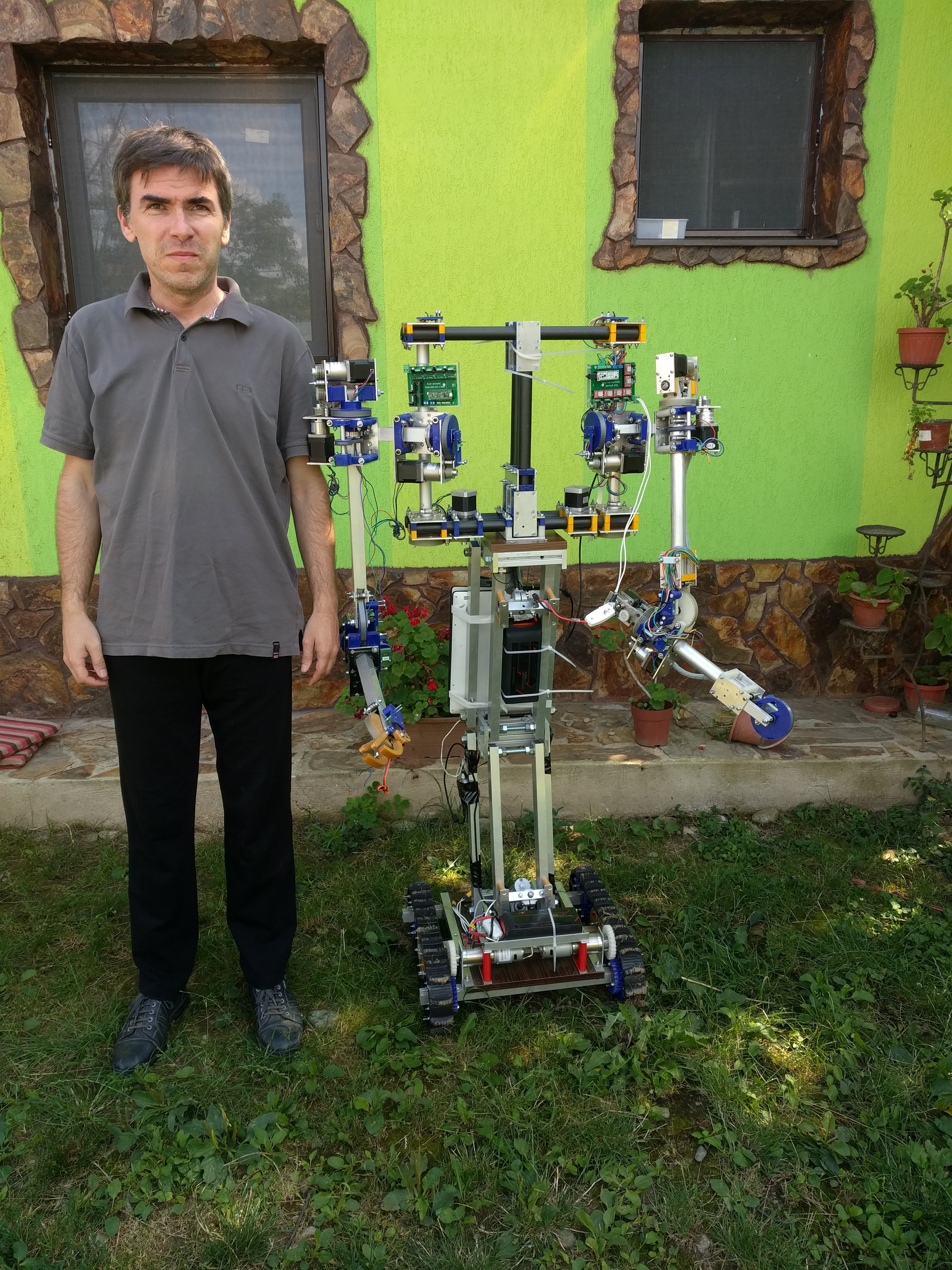
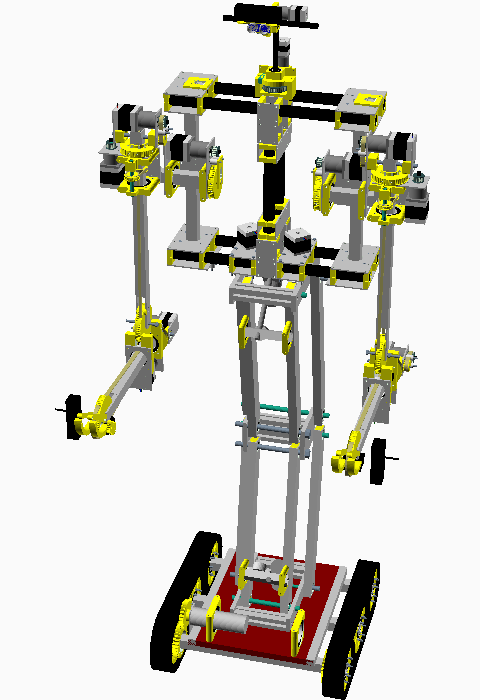
Jenny 5 คือ Robot แบบ open-source อย่างเต็มรูปแบบ โดยมี mobile platform, ขาที่ยืดหยุ่น, แขนสองข้างที่มี 7 degrees of freedom ในแต่ละข้าง และส่วนหัว

Jenny 5 คือ Robot แบบ open-source อย่างเต็มรูปแบบ โดยมี mobile platform, ขาที่ยืดหยุ่น, แขนสองข้างที่มี 7 degrees of freedom ในแต่ละข้าง และส่วนหัว
▶ กดเพื่อดูวิดีโอสาธิตโปรเจกต์
Jenny 5 เป็นหุ่นยนต์ (เกือบจะ) humanoid ที่มีจุดประสงค์หลักเพื่อใช้ในการวิจัย แต่ก็สามารถใช้เป็นผู้ช่วยมนุษย์ได้เช่นกัน สามารถดูรายละเอียดเพิ่มเติมเกี่ยวกับ Jenny 5 ได้ที่: https://jenny5.org หรือ https://jenny5-robot.github.io.
Jenny 5 ได้รับแรงบันดาลใจมาจากหุ่นยนต์ Johnny 5 จากภาพยนตร์เรื่อง Short Circuit ซึ่งเป็นภาพยนตร์ที่ยอดเยี่ยมที่ทุกคนควรได้ดู
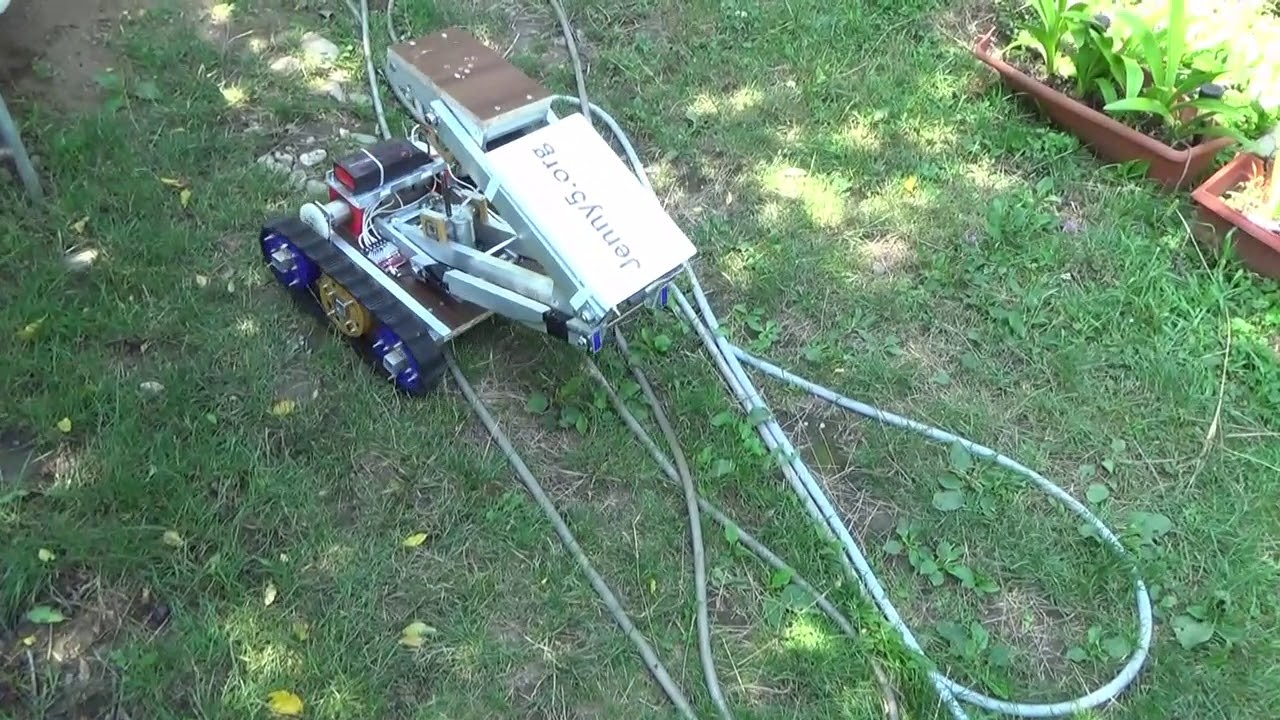
Jenny 5 มี mobile platform แบบตีนตะขาบ มีขาที่ยืดหยุ่นได้ มีแขน 2 ข้างที่มีความอิสระข้างละ 7 degrees of freedom และมีส่วนหัว 1 ส่วน
ไฟล์ source ทั้งหมด (CAD, software และอื่นๆ) สำหรับ Jenny 5 สามารถใช้งานได้ฟรีบน GitHub. โดย code ทั้งหมดถูกเผยแพร่ภายใต้ MIT license เพื่อให้ทุกคนสามารถนำไปใช้งานได้อย่างอิสระทั้งในส่วนบุคคลและเชิงพาณิชย์
Jenny 5 สร้างได้ง่ายและมีราคาถูก ส่วนประกอบส่วนใหญ่สามารถหาซื้อได้จากร้านขายอุปกรณ์หุ่นยนต์ ชิ้นส่วนที่ต้องทำขึ้นเองสามารถพิมพ์ได้ด้วย 3D printer ส่วน aluminium profiles บางส่วนสามารถตัดและเจาะได้ด้วยเครื่องมือสำหรับเหล่านักประดิษฐ์ (hobbyists)
ค่าวัสดุอุปกรณ์ (ไม่รวมคอมพิวเตอร์) อยู่ที่ประมาณ 2500 USD (กรุณาดู bill of materials สำหรับรายละเอียดเพิ่มเติม)
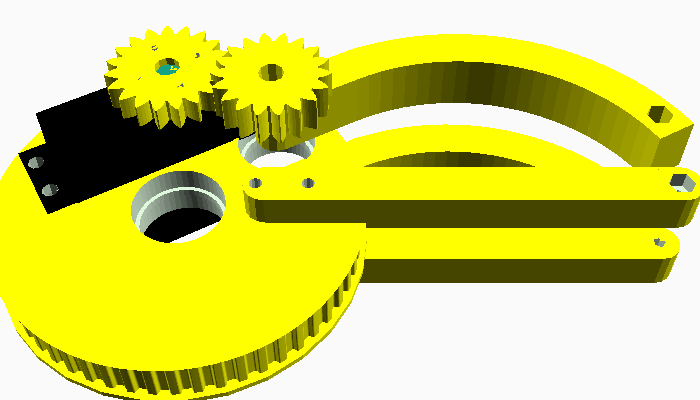
Jenny 5 ถูกออกแบบใน OpenSCAD ซึ่งเป็น software CAD ที่คุณต้องเขียนคำสั่งแทนการใช้เมาส์เพื่อสร้างวัตถุต่างๆ ขึ้นมา
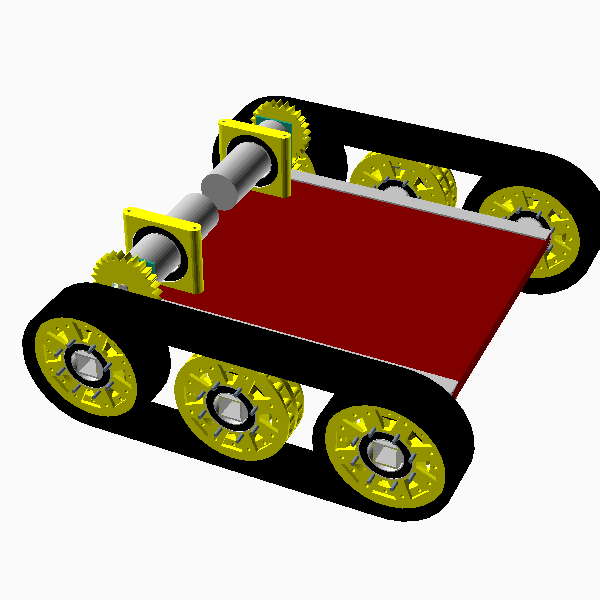
ส่วน platform ขับเคลื่อนด้วย DC motors 2 ตัว พร้อม planetary gearbox ควบคุมโดย board RoboClaw
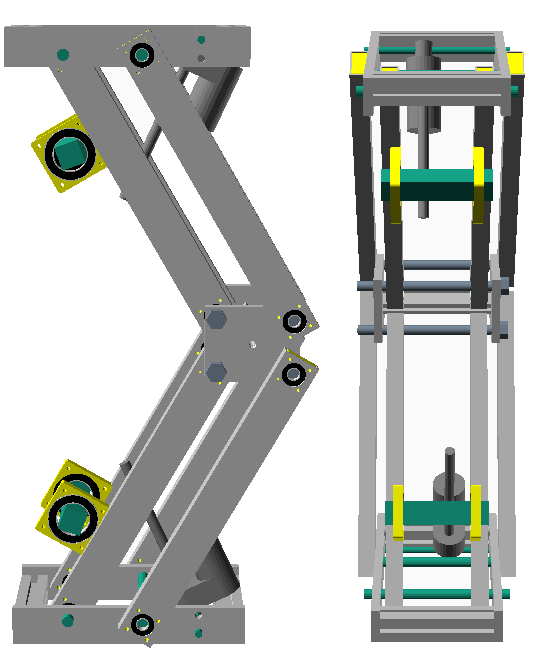
ส่วนขาขับเคลื่อนด้วย linear motors 2 ตัว ควบคุมโดย board RoboClaw
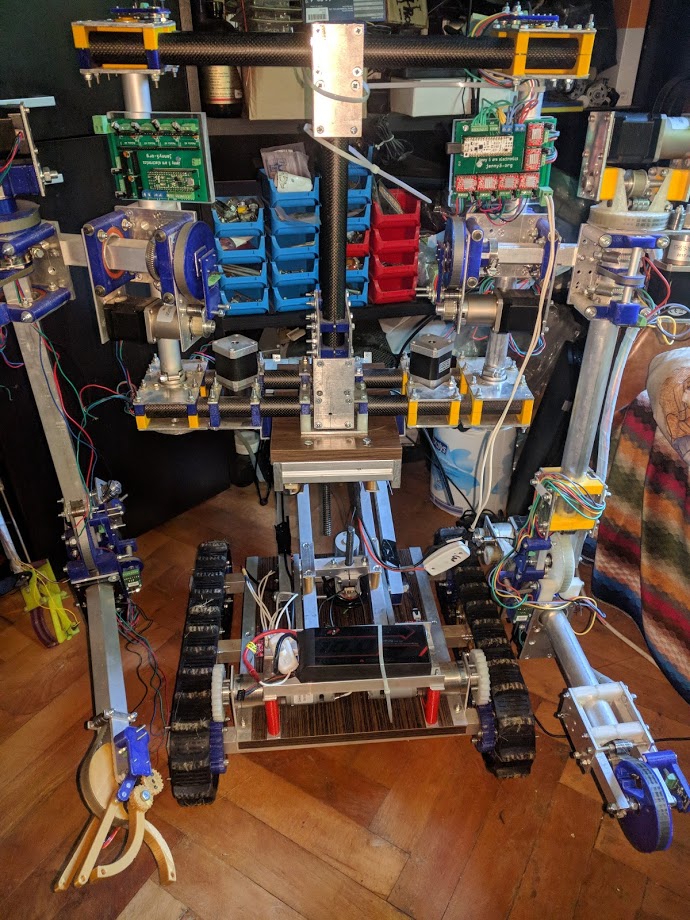
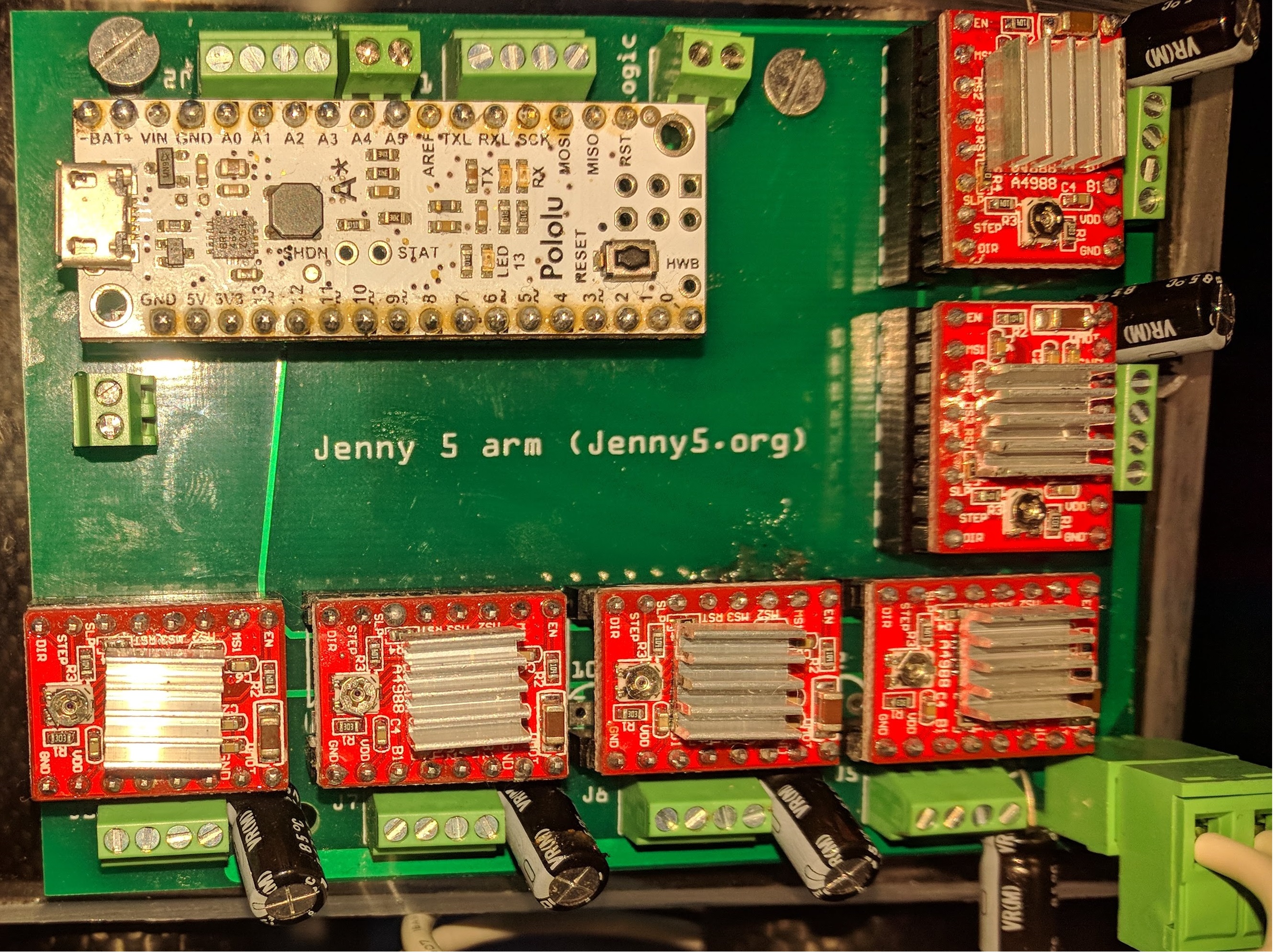
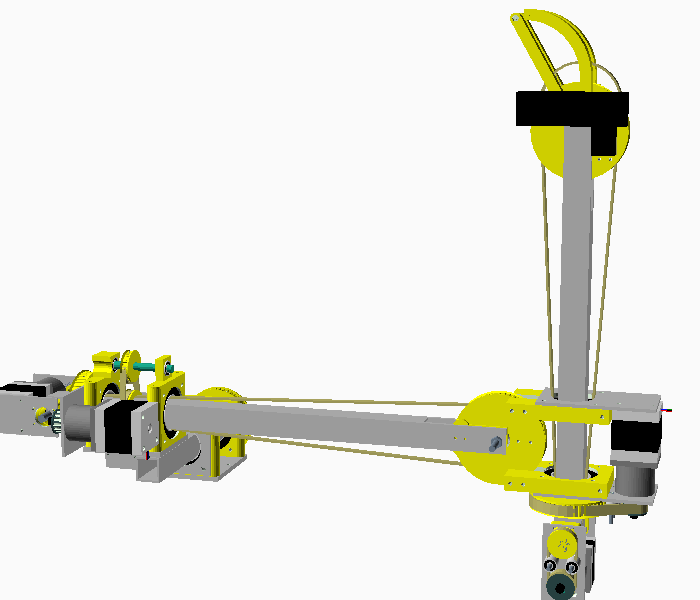
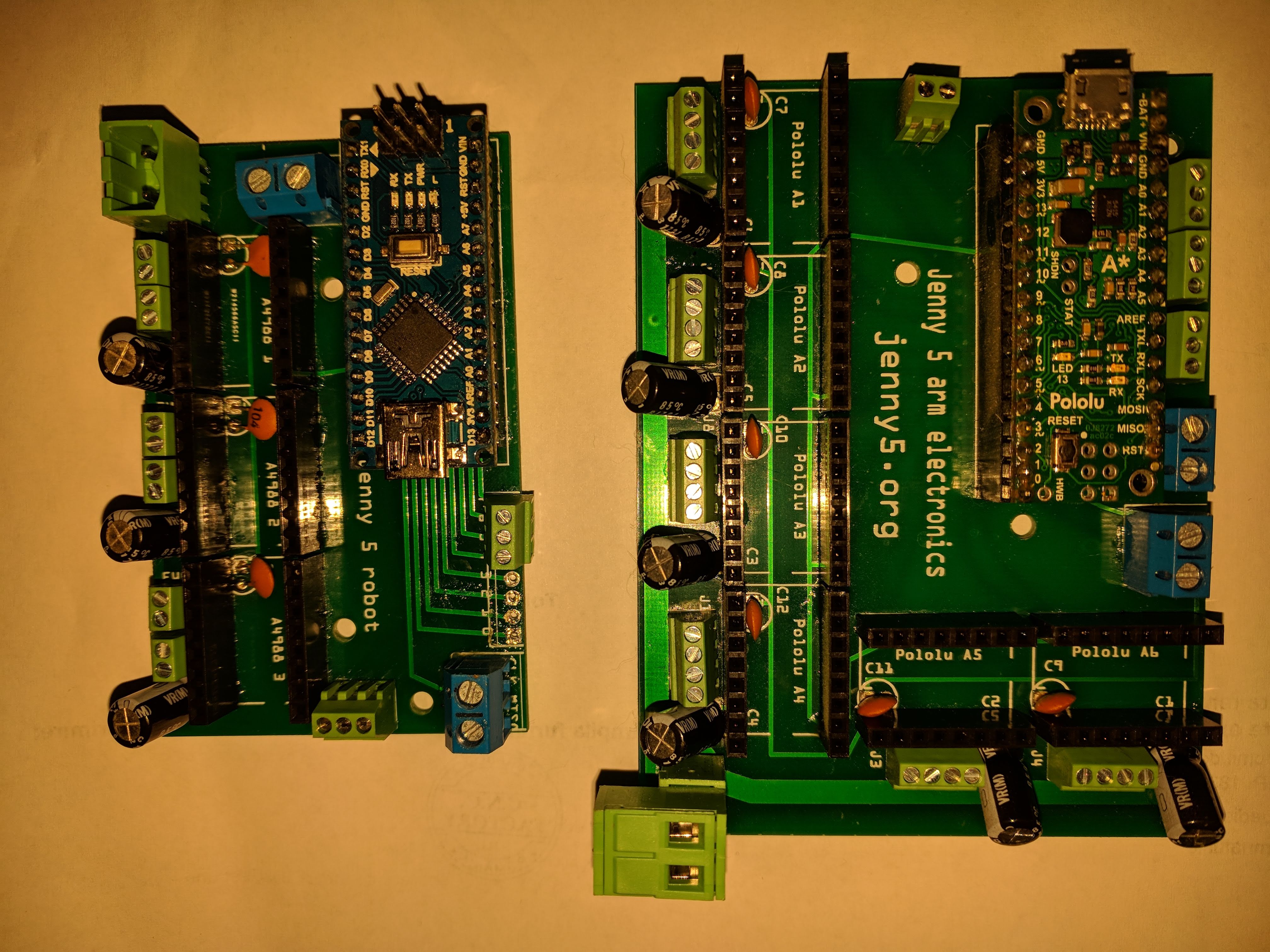
แขนแต่ละข้างมี stepper motors 6 ตัว และแต่ละข้อต่อจะมี magnetic sensor ติดตั้งอยู่เพื่ออ่านค่าตำแหน่งของมัน โดย motors และ sensors จะถูกควบคุมโดย board A-Star 32U4 Mini
ส่วน gripper ขับเคลื่อนด้วย servo motor และเชื่อมต่อกับ board A-Star 32U4 Mini ตัวเดียวกับที่คุมแขนทั้งข้าง นอกจากนี้ gripper ยังมี webcam ติดตั้งไว้สำหรับตรวจจับวัตถุที่อยู่ใกล้เคียง
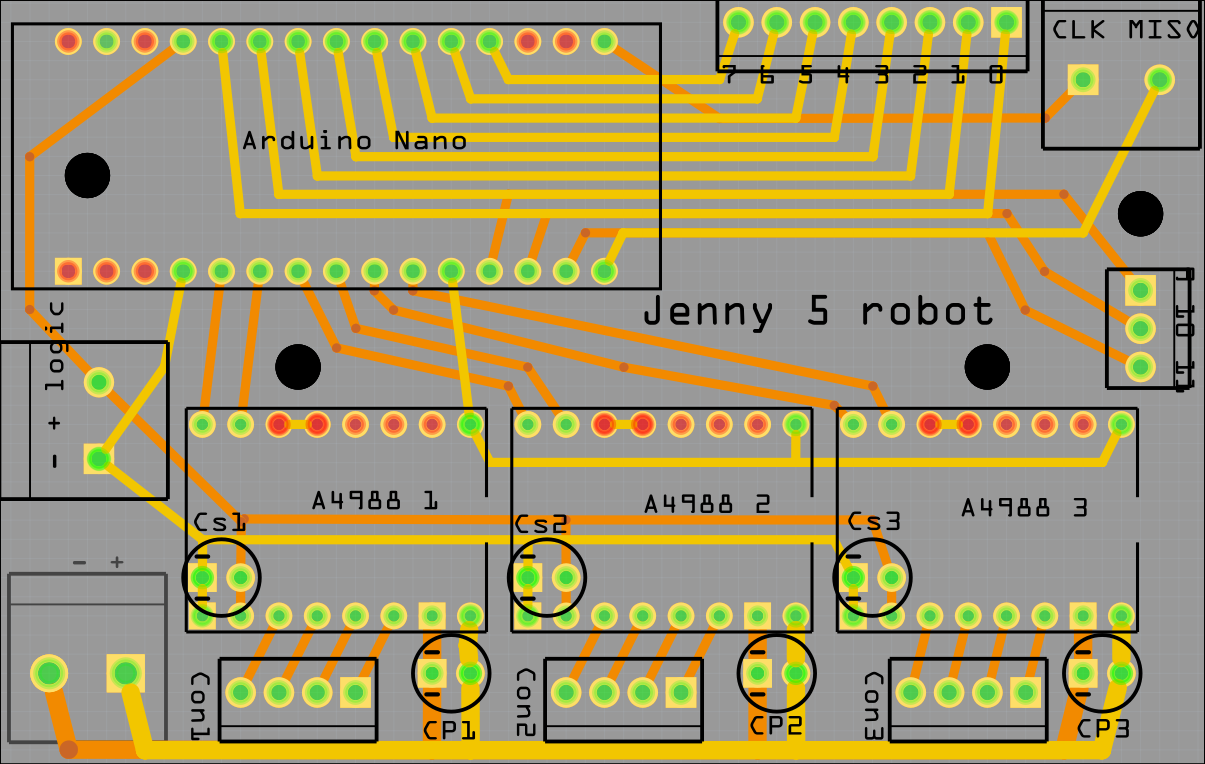
ส่วนหัวมี 2 degrees of freedom ซึ่งขับเคลื่อนด้วย stepper motors 2 ตัวที่มี magnetic sensor ติดตั้งไว้สำหรับอ่านค่าตำแหน่ง ส่วนหัวมี webcam สำหรับตรวจจับวัตถุและมี ultrasonic sensor สำหรับวัดระยะทาง ส่วนประกอบทั้งหมดของหัว ยกเว้นกล้อง จะเชื่อมต่อกับ board Arduino Nano
หุ่นยนต์ทั้งตัวใช้พลังงานจาก LiPo batteries 2 ก้อน: ก้อนหนึ่งสำหรับ platform และส่วนเท้า และอีกก้อนสำหรับส่วนแขนและหัว
Board A-Star / Arduino รัน firmware ที่สร้างขึ้นเป็นพิเศษชื่อว่า Scufy ซึ่งสามารถควบคุม stepper motors ได้หลายตัวและอ่านค่า sensors ได้หลากหลายชนิด เช่น buttons, ultrasonic, potentiometers, infrared, LIDAR และอื่นๆ
Software บน PC ถูกสร้างขึ้นจาก libraries หลายตัวที่จะส่งคำสั่งผ่าน serial port ไปยัง board A-Star/ Arduino และ controller RoboClaw
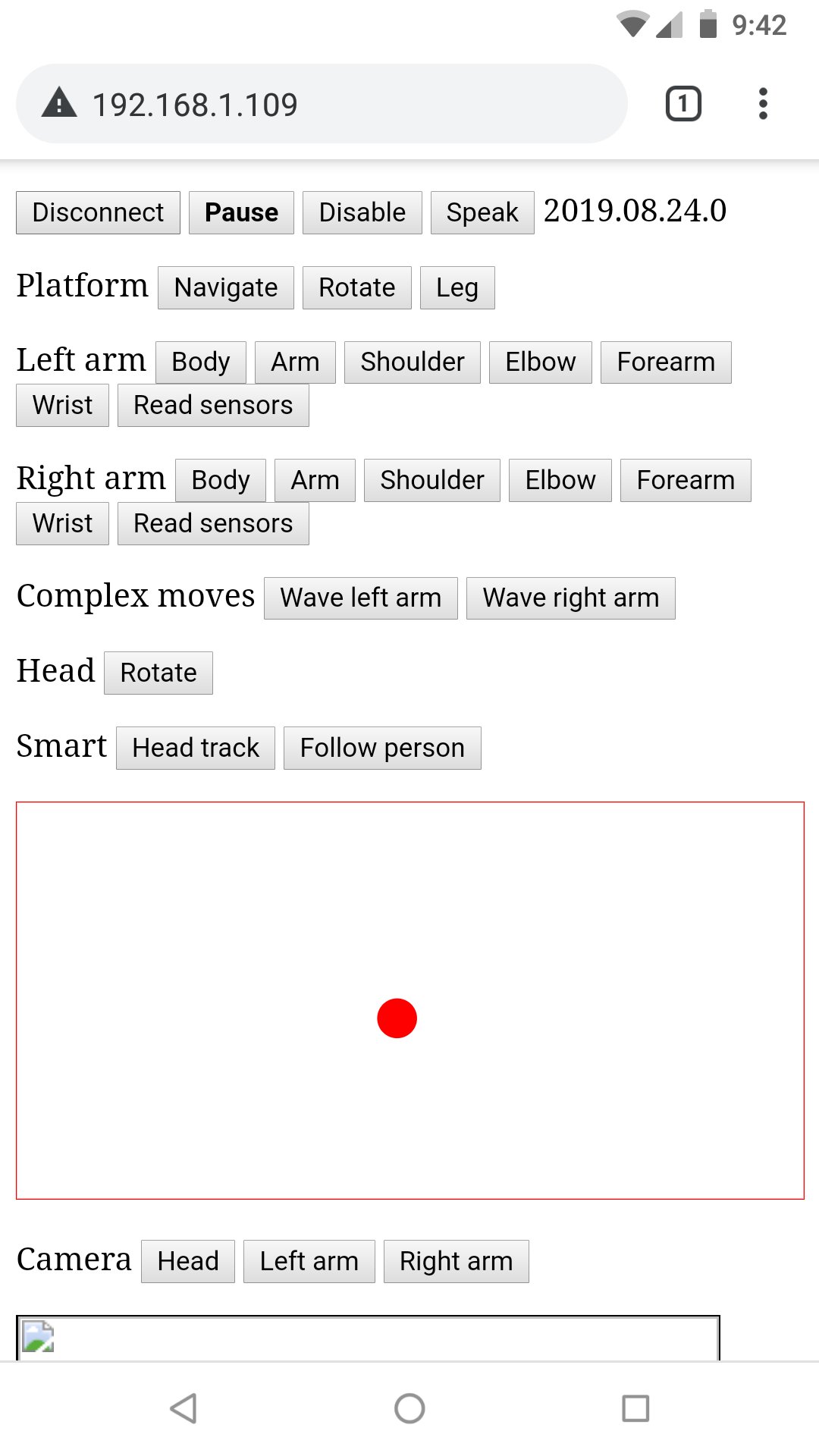
หุ่นยนต์สามารถควบคุมแบบ manual ได้ผ่าน application HTML5 ที่รันบน browser ใน smartphone โดย application HTML5 จะเชื่อมต่อกับ server ที่รันอยู่บนตัวหุ่นยนต์ ซึ่ง server นี้จะเป็นตัวที่รับหน้าที่ประมวลผลคำสั่งจริงๆ (เช่น การเคลื่อนที่, การอ่านค่า sensors) โดยตัว server ถูกสร้างขึ้นบน WebSocket server ขนาดเบา
ด้วยองค์ประกอบทั้งหมดนี้ หุ่นยนต์จึงสามารถนำไปใช้งานได้ในสถานการณ์ที่หลากหลาย นี่คือรายการสั้นๆ ของสิ่งที่หุ่นยนต์สามารถทำได้ (หากมีการโปรแกรมอย่างถูกต้อง):
สำหรับรายละเอียดเพิ่มเติม กรุณาอ่าน technical report เกี่ยวกับ Jenny 5
คุณยังสามารถติดตามข่าวสารได้ที่ Google group ของ Jenny 5




สนับสนุนเพื่อรับ Source Code หรือแอปพลิเคชันสำหรับโปรเจกต์นี้
Verified user reviews
ล็อกอินด้วยบัญชีบนเว็บนี้แล้วให้คะแนนหรือคอมเมนต์ได้เลย ระบบเก็บผ่าน Supabase ไม่ต้องใช้ GitHub แล้ว
ยังไม่มีรีวิวที่อนุมัติแล้ว เป็นคนแรกที่มาให้ความเห็นได้เลย
