Intermediate
โปรเจกต์ MAX009
MeArm ติดตั้งบน smart robot car ควบคุมโดย 2 Arduino UNOs

MeArm ติดตั้งบน smart robot car ควบคุมโดย 2 Arduino UNOs

▶ กดเพื่อดูวิดีโอสาธิตโปรเจกต์
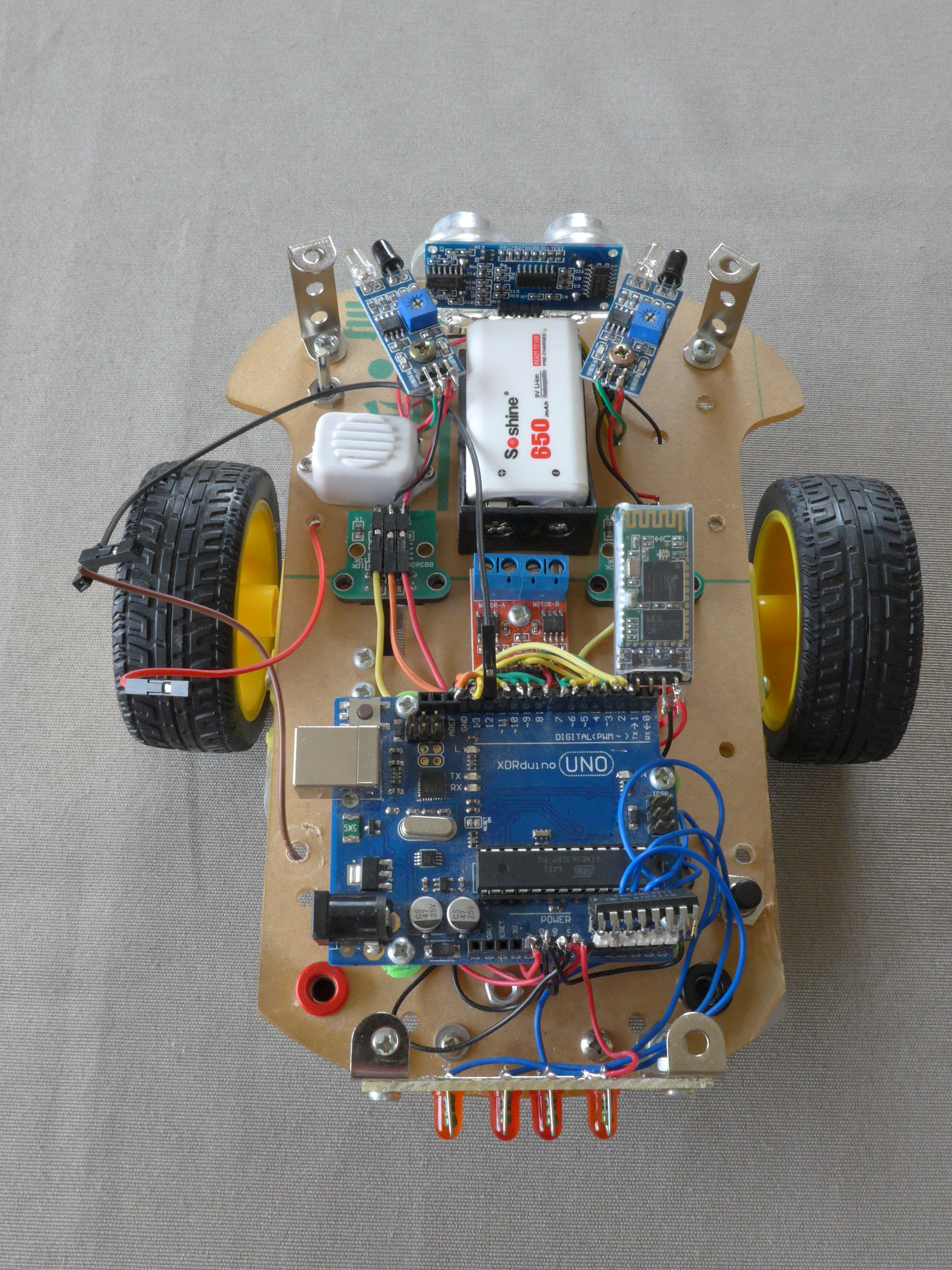
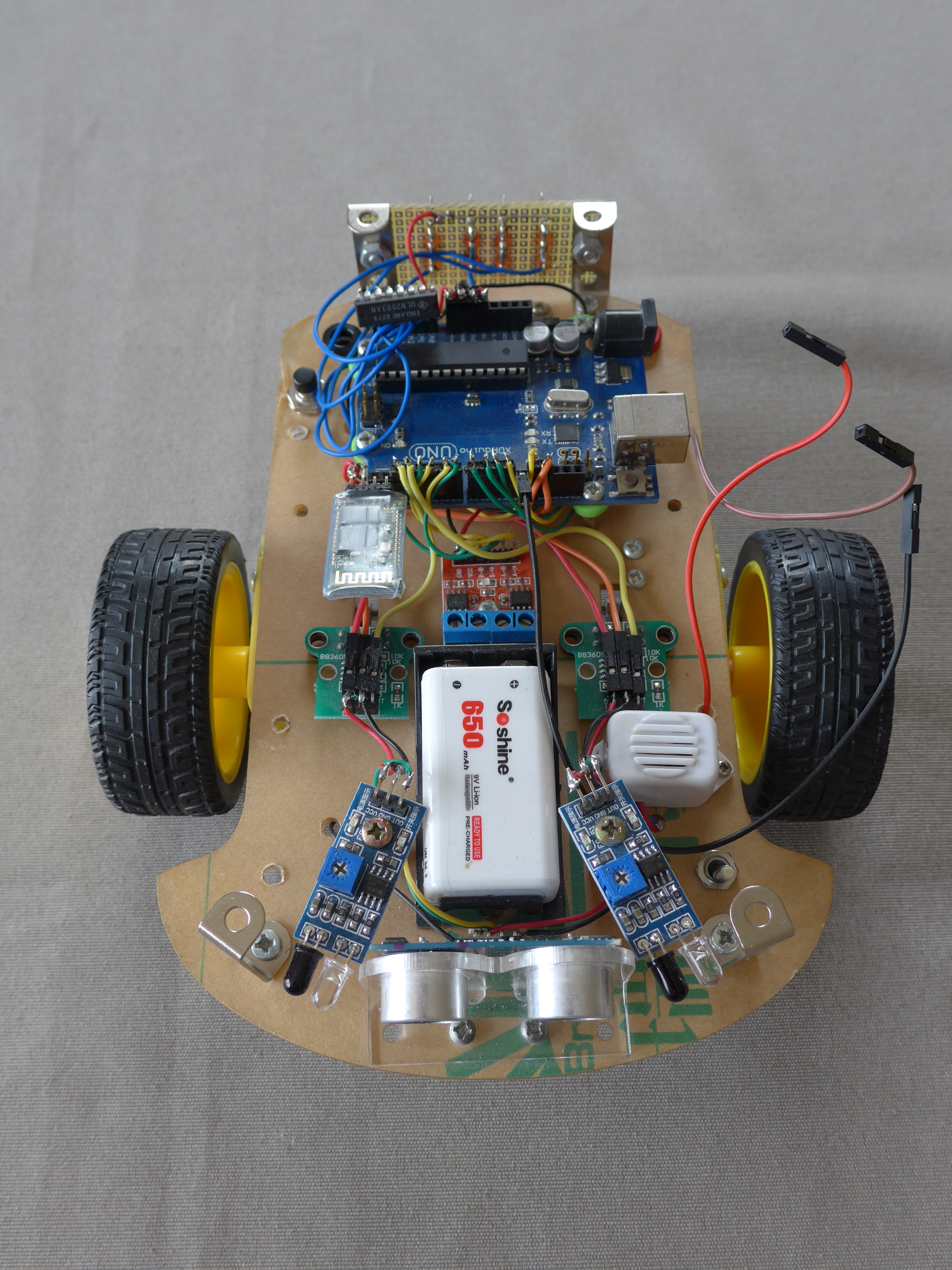
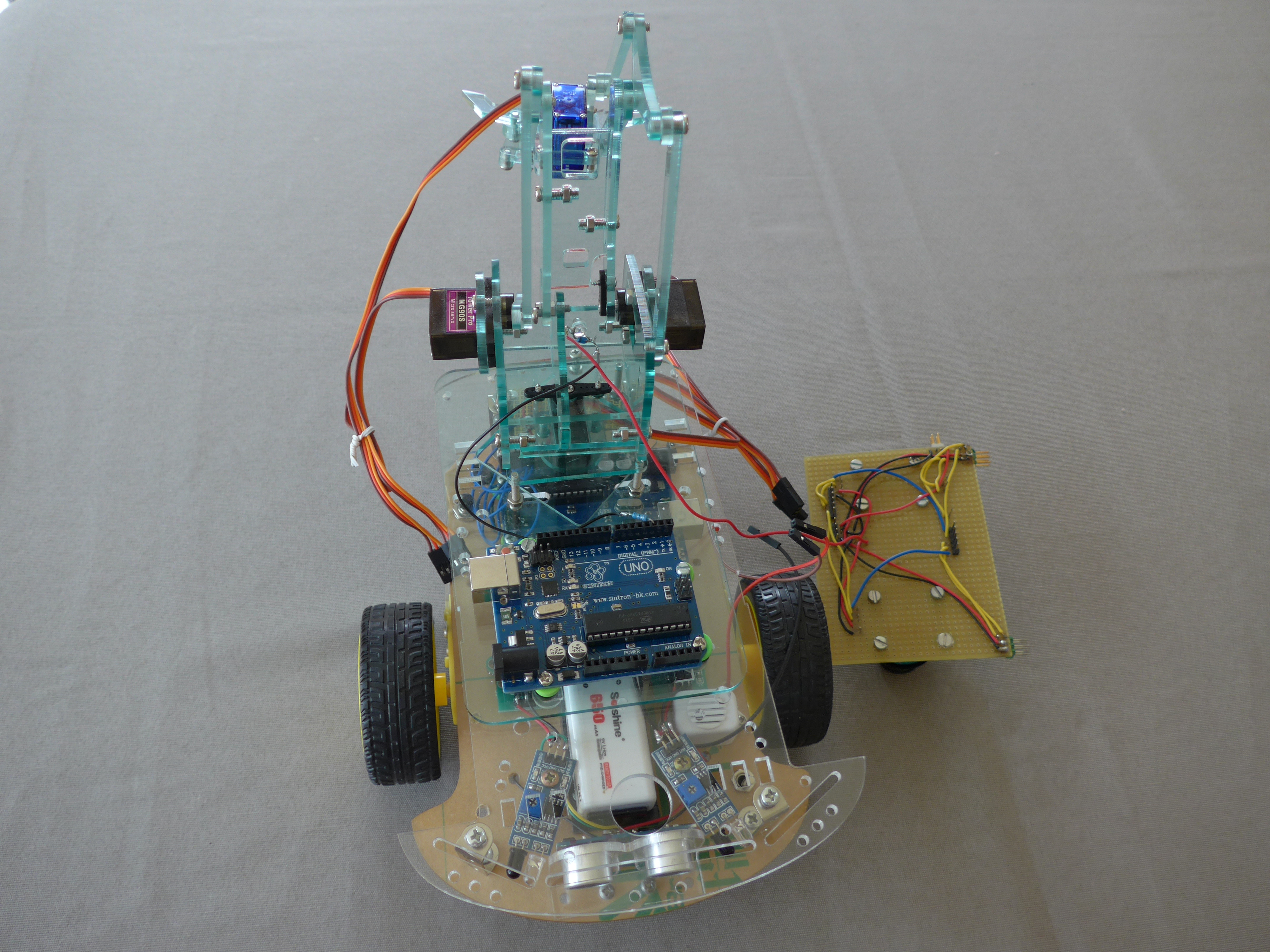
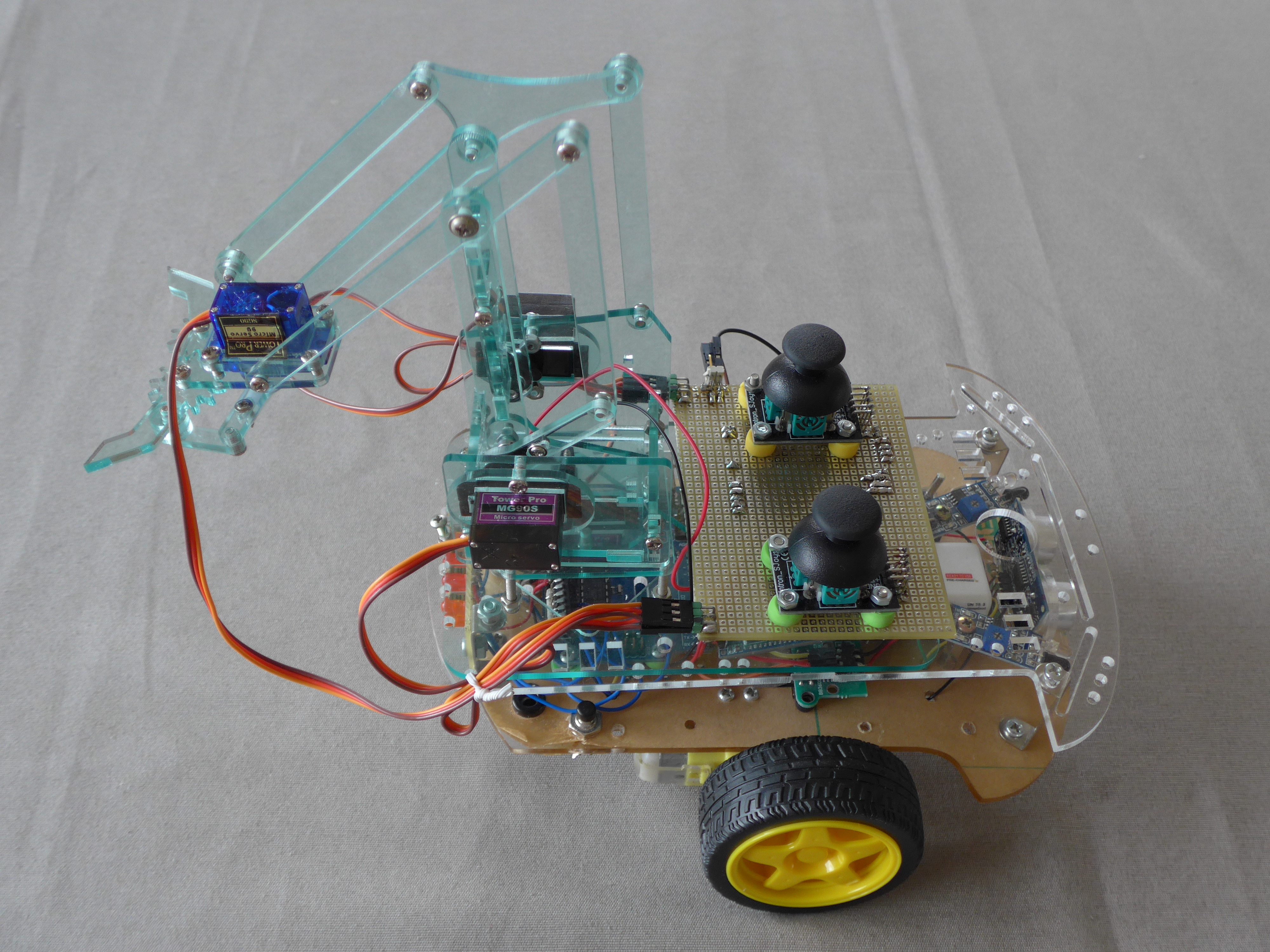
MAX009 คือแขนหุ่นยนต์แบบ 4 degrees of freedom (4DOF) ที่ติดตั้งอยู่บนรถหุ่นยนต์อัจฉริยะขับเคลื่อน 2 ล้อ (2WD)
รถหุ่นยนต์อัจฉริยะประกอบด้วย 2 DC motors และ 2 infrared speed sensors ช่วยให้ควบคุมความเร็วของล้อทั้ง 2 ได้อย่างแม่นยำ นอกจากนี้ยังมี 1 ultrasonic distance sensor และ 2 infrared proximity sensors สำหรับใช้หลบหลีกสิ่งกีดขวาง (obstacle avoidance) มีไฟ led ทั้งด้านหน้า, ด้านหลัง, ด้านซ้าย และด้านขวา รวมถึงมีแตร (horn)...
ส่วนของแขนหุ่นยนต์คือ MeArm ที่มาพร้อมกับ 2 joysticks สำหรับการควบคุมด้วยตนเอง และมีไฟ led สีขาวเพิ่มเติมที่ฐาน
MAX009 ถูกควบคุมโดย 2 arduino (ตัวหนึ่งสำหรับรถ และอีกตัวสำหรับแขน) สื่อสารกันเองและสื่อสารกับโลกภายนอกผ่าน bluetooth สามารถควบคุมจากระยะไกลได้ทั้งหมดผ่าน android app โดยเฉพาะ และยังสามารถเขียนโปรแกรมผ่าน LOGO interpreter แบบง่ายที่ฝังอยู่ใน arduino ตัวหนึ่งได้ด้วย
สามารถบันทึกโปรแกรม LOGO ได้ 1 โปรแกรมใน Arduino EEPROM และเริ่มทำงานได้ด้วยการกด push button ส่วนในหน่วยความจำของสมาร์ทโฟนสามารถบันทึกได้ 10 โปรแกรมผ่านทาง MAX009 android app ทั้งรถหุ่นยนต์อัจฉริยะและ MeArm ใช้พลังงานจาก 9V Li-Ion battery เพียงก้อนเดียว
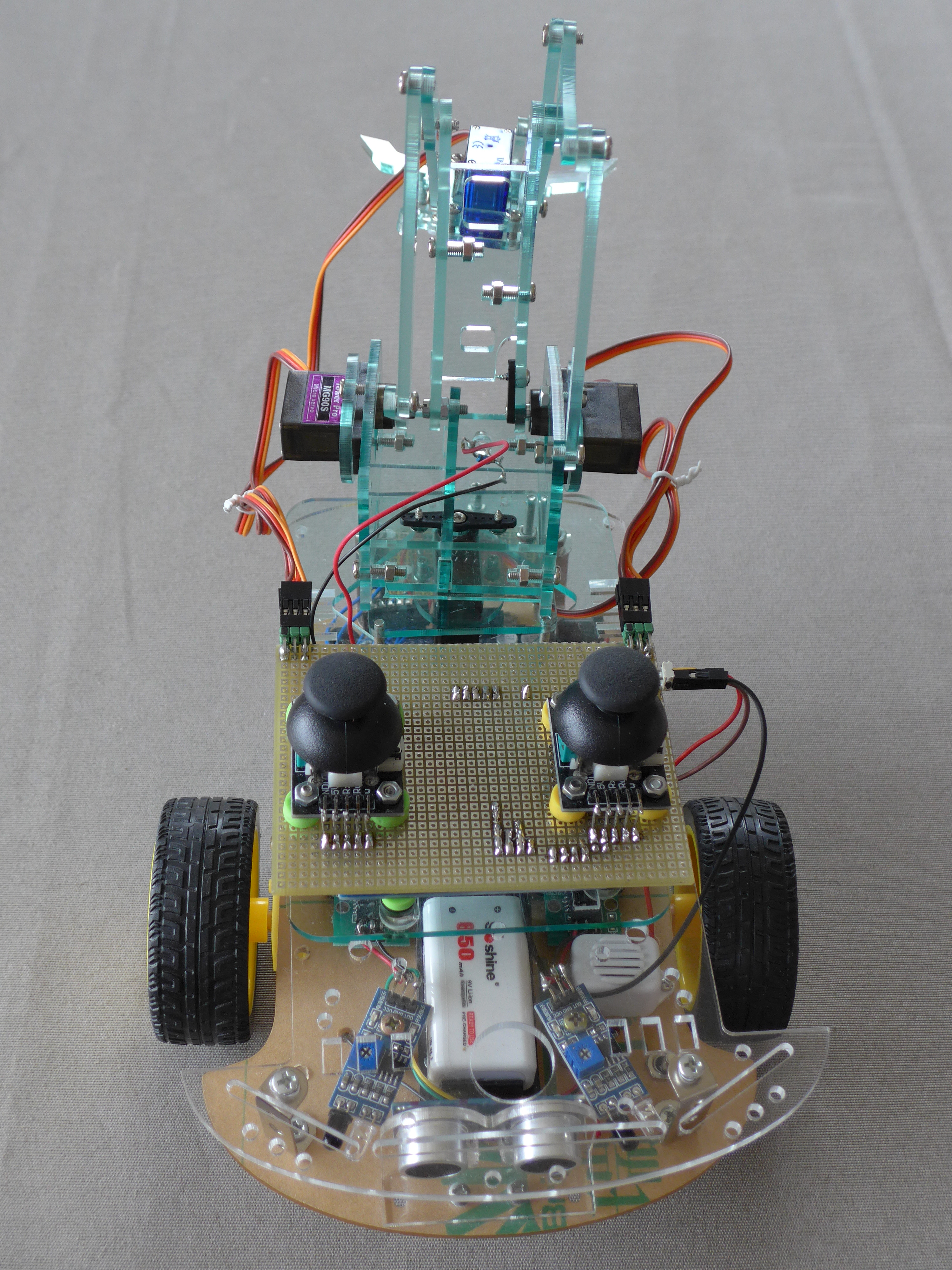
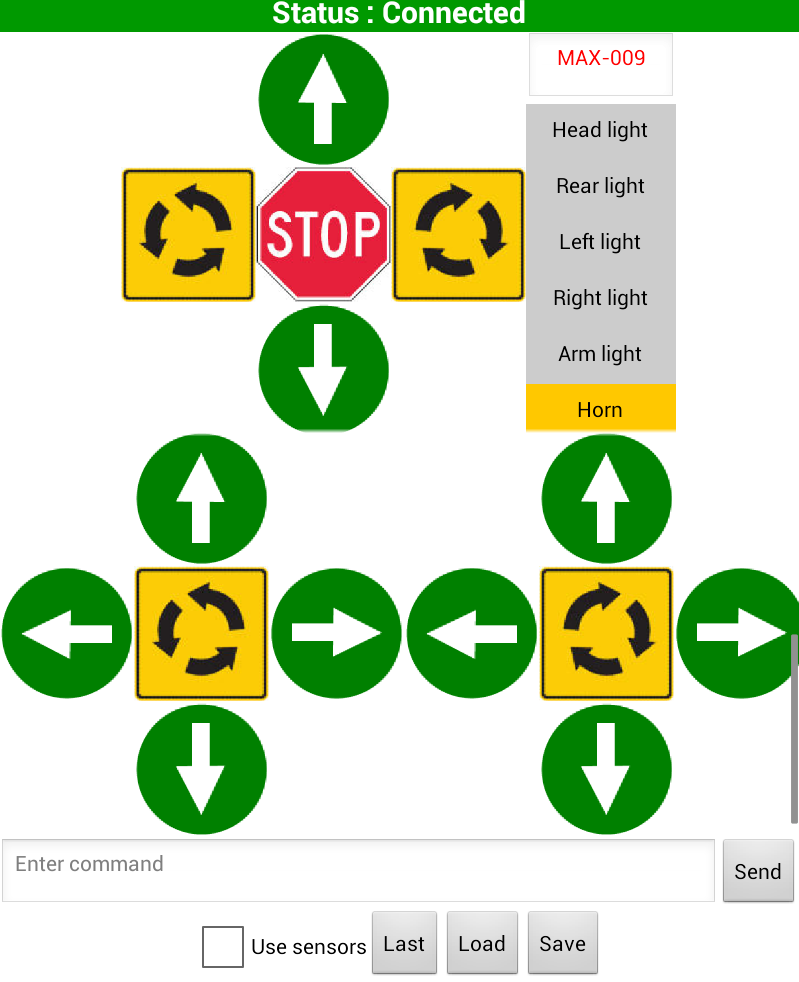
ในส่วนด้านบน ปุ่มลูกศรจะใช้สำหรับควบคุมรถหุ่นยนต์อัจฉริยะ กลุ่มปุ่มกดใช้สำหรับควบคุมไฟและแตร (horn) ในส่วนตรงกลาง ชุดลูกศรคู่ใช้สำหรับควบคุมแขนหุ่นยนต์ MeArm เช่นเดียวกับ 2 joysticks บน Arduino shield
ที่ด้านล่าง สามารถกรอกคำสั่ง LOGO และส่งไปยังหุ่นยนต์ได้ สามารถเรียกใช้คำสั่งล่าสุดได้โดยการกดปุ่ม “Last” สามารถบันทึกและเรียกใช้คำสั่ง (หรือรายการคำสั่ง) 10 รายการจากหน่วยความจำของโทรศัพท์โดยใช้ปุ่ม “Save” และ “Load”
สุดท้ายนี้ รถหุ่นยนต์สามารถควบคุมได้ด้วย gyro sensors ของโทรศัพท์โดยการติ๊กที่ช่อง “Use sensors”
คุณสามารถเลือกซื้อชุดคิทราคาประหยัดสำหรับโครงรถและชิ้นส่วนกลไก MeArm ได้ตามต้องการ แต่ควรลงทุนกับ motor ที่มีคุณภาพดี
สำหรับแขนหุ่นยนต์ ยกเว้นในส่วนของก้ามปู (claw) จำเป็นอย่างยิ่งที่จะต้องเลือก metal bearing servos ที่มี analogue controller มิฉะนั้นแขนอาจจะสั่นหรือไม่เสถียร
สำหรับรถหุ่นยนต์ stepper motors อาจให้การเคลื่อนที่ที่แม่นยำกว่าเมื่อเทียบกับ DC motors ที่ใช้ในโปรเจกต์นี้
สนับสนุนเพื่อรับ Source Code หรือแอปพลิเคชันสำหรับโปรเจกต์นี้
