Intermediate
โปรเจกต์ OpenCat - quadruped robot ราคาประหยัดสำหรับ STEM
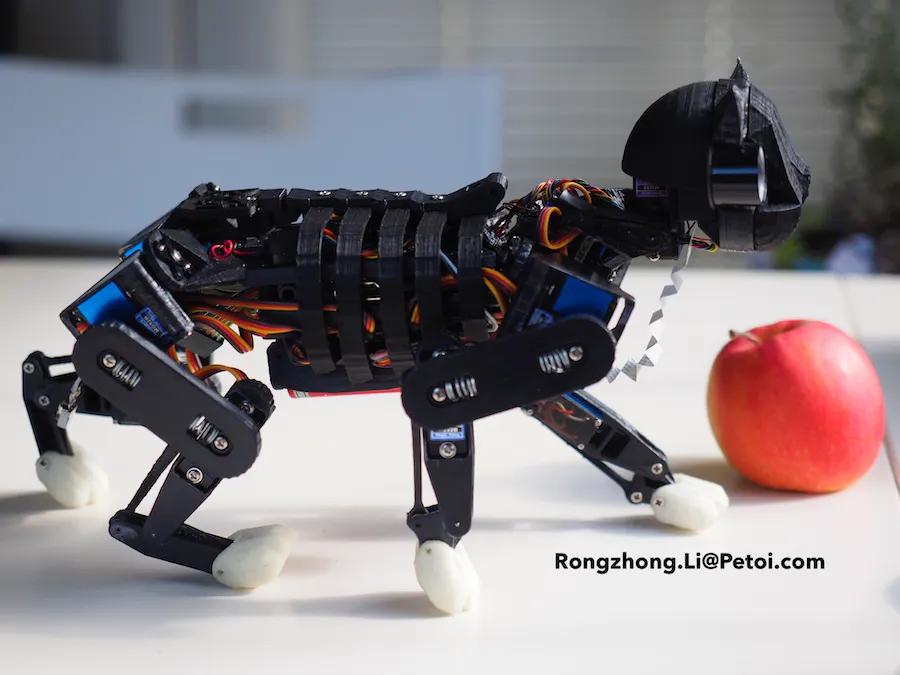
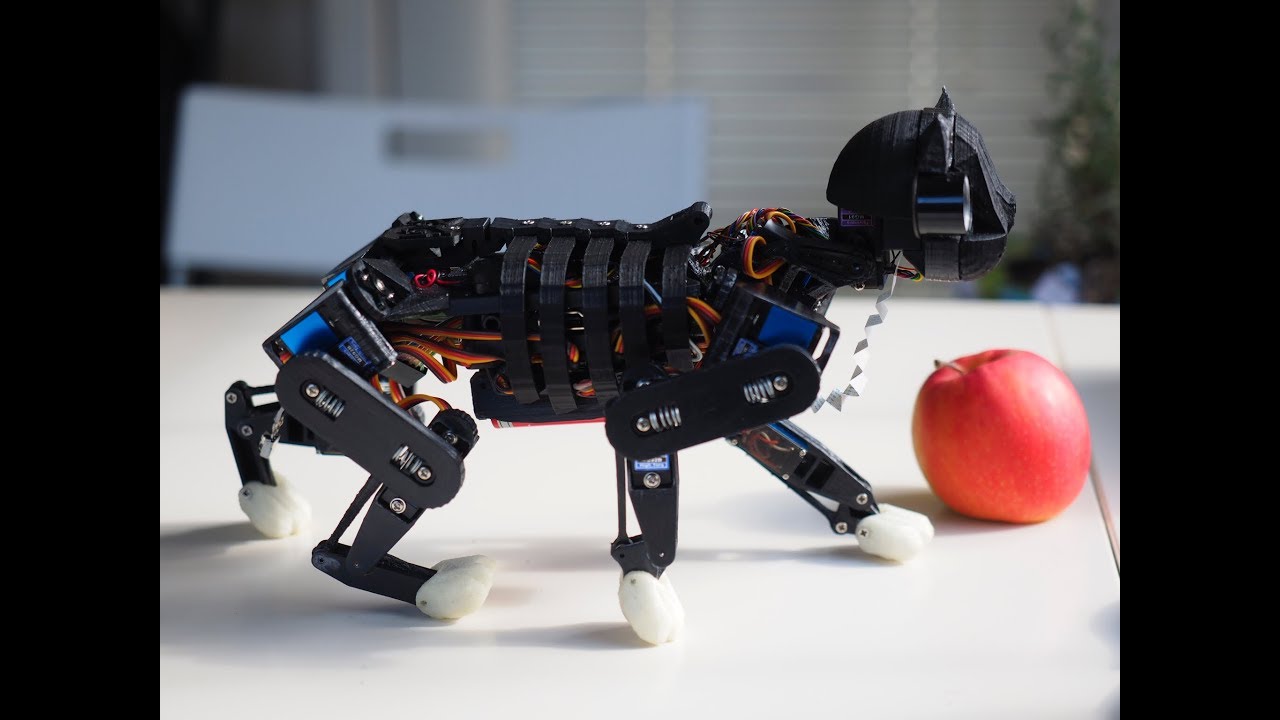
หุ่นยนต์แมวที่ programmable และ maneuverable สูง สำหรับ STEM education และ AI-enhanced services
หุ่นยนต์แมวที่ programmable และ maneuverable สูง สำหรับ STEM education และ AI-enhanced services
▶ กดเพื่อดูวิดีโอสาธิตโปรเจกต์
Project Supporter Team
โพสต์โดย
ผู้อ่านจากจีนแผ่นดินใหญ่สามารถรับชมได้ที่นี่ (readers from mainland China can see it here):
http://v.youku.com/v_show/id_XMzQxMzA1NjM0OA==.html?spm=a2h3j.8428770.3416059.1
อัปเดต ก.ค. 2022:
ชมความคล่องตัวของ Bittle หุ่นยนต์รุ่นที่สองของ OpenCat ในการแข่งขันฟุตบอล:
อัปเดต ธ.ค. 2021:
คุณสามารถสั่งซื้อโมเดลที่ผลิตจำนวนมาก (mass-produced) ทั้งสองรุ่นของเราที่ต่อยอดมาจาก OpenCat ได้ที่ร้านค้าออนไลน์อย่างเป็นทางการ: www.petoi.com/store
อัปเดต ต.ค. 2018:
มีโพสต์ใหม่บน Hackster เกี่ยวกับ Nybble.
คุณสามารถติดตาม Petoi.com หรือ Twitter ของผม https://twitter.com/PetoiCamp สำหรับการอัปเดตต่างๆ โดย Code ถูกโพสต์ไว้บน Github: https://github.com/PetoiCamp/OpenCat.
ขอบคุณครับ!
ได้รับการกล่าวถึงบน IEEE Spectrum:
The Next Web:
------
อัปเดต ส.ค. 2020:
ผมกำลังเปิดตัวผลิตภัณฑ์ที่สอง Petoi Bittle บน Kickstarter! https://www.kickstarter.com/projects/petoi/bittle
------
สวัสดีครับ
คุณอาจเคยเห็นสุนัขของ Boston Dynamics และ Sony Aibo ที่เพิ่งเปิดตัวไป พวกมันเจ๋งมากแต่ก็มีราคาสูงเกินกว่าจะเข้าถึงได้ ผมหวังที่จะนำเสนอทางเลือกที่ราคาจับต้องได้ซึ่งมีความสามารถในการเคลื่อนที่ส่วนใหญ่ใกล้เคียงกัน ผมไม่ได้บอกว่าผมสามารถเลียนแบบการเคลื่อนที่ที่แม่นยำของยักษ์ใหญ่ด้านหุ่นยนต์เหล่านั้นได้ ผมเพียงแค่กำลังทลายกำแพงราคาจากหลักล้านดอลลาร์ให้เหลือเพียงหลักร้อย ผมไม่ได้คาดหวังจะส่งมันไปในสนามรบหรือสภาพแวดล้อมที่ท้าทายอื่นๆ ผมแค่ต้องการให้เพื่อนตัวแสบตัวนี้เข้ากับบ้านที่สะอาด ฉลาด แต่เงียบเหงาจนเกินไปได้
ด้วยทรัพยากรและความรู้ที่จำกัด ผมเริ่มจากจุดเล็กๆ โครงสร้างที่เล็กลงช่วยหลีกเลี่ยงความท้าทายด้านวิศวกรรมมากมายที่พบในโมเดลขนาดใหญ่ นอกจากนี้ยังช่วยให้สามารถปรับปรุงและพัฒนา (Iteration) ได้เร็วขึ้น เหมือนกับที่หนูปรับตัวได้เร็วกว่าช้าง ไม่ว่าฮาร์ดแวร์จะเป็นอย่างไร Algorithm การควบคุมหลักก็สามารถใช้ร่วมกันได้เมื่อมีการ Mapping ค่า DoF ที่แม่นยำแล้ว ผมได้พัฒนา Algorithm การเคลื่อนที่ (พร้อมพารามิเตอร์นับสิบตัว) สำหรับท่าทางการเดิน (Gait) หลายรูปแบบ ความเร็วสูงสุดที่เคยทำได้คือมากกว่า 3 เท่าของความยาวลำตัวต่อวินาที ด้วยท่าเดินแบบ Trot (ยกเท้าลอยในอากาศ 2 ข้าง) เนื่องจากผมมีการเพิ่มส่วนประกอบใหม่ๆ และเปลี่ยนค่า CoM อยู่ตลอด ในขณะที่ส่วนการปรับตัว (Adaptive part) ยังไม่ดีพอ ผมจึงขอเก็บเวลาในการปรับจูนไว้สำหรับโมเดลฉบับสมบูรณ์ครับ

ปัจจุบัน Algorithm การเคลื่อนที่ถูกรันบนบอร์ด Arduino ขนาด 32KB, 16MHz ซึ่งใช้ทรัพยากรระบบจนเต็มที่จากการปรับแต่ง Algorithm ในเกือบทุกจุด ผมกำลังจะเปลี่ยนไปใช้บอร์ดขนาด 256KB, 48MHz เพื่อเพิ่มประสิทธิภาพในการปรับตัวแบบ Active รวมถึงรองรับ Code เพิ่มเติมจากผู้ใช้ในอนาคต การเคลื่อนที่ถูกขับเคลื่อนด้วย Servo ระดับงานอดิเรก (แต่ยังคงทนทาน เป็นแบบ Digital และเฟืองโลหะ) เพื่อควบคุมราคา มีการนำโครงสร้างแบบยืดหยุ่นบางส่วนมาใช้เพื่อช่วยลดแรงกระแทกและปกป้องฮาร์ดแวร์
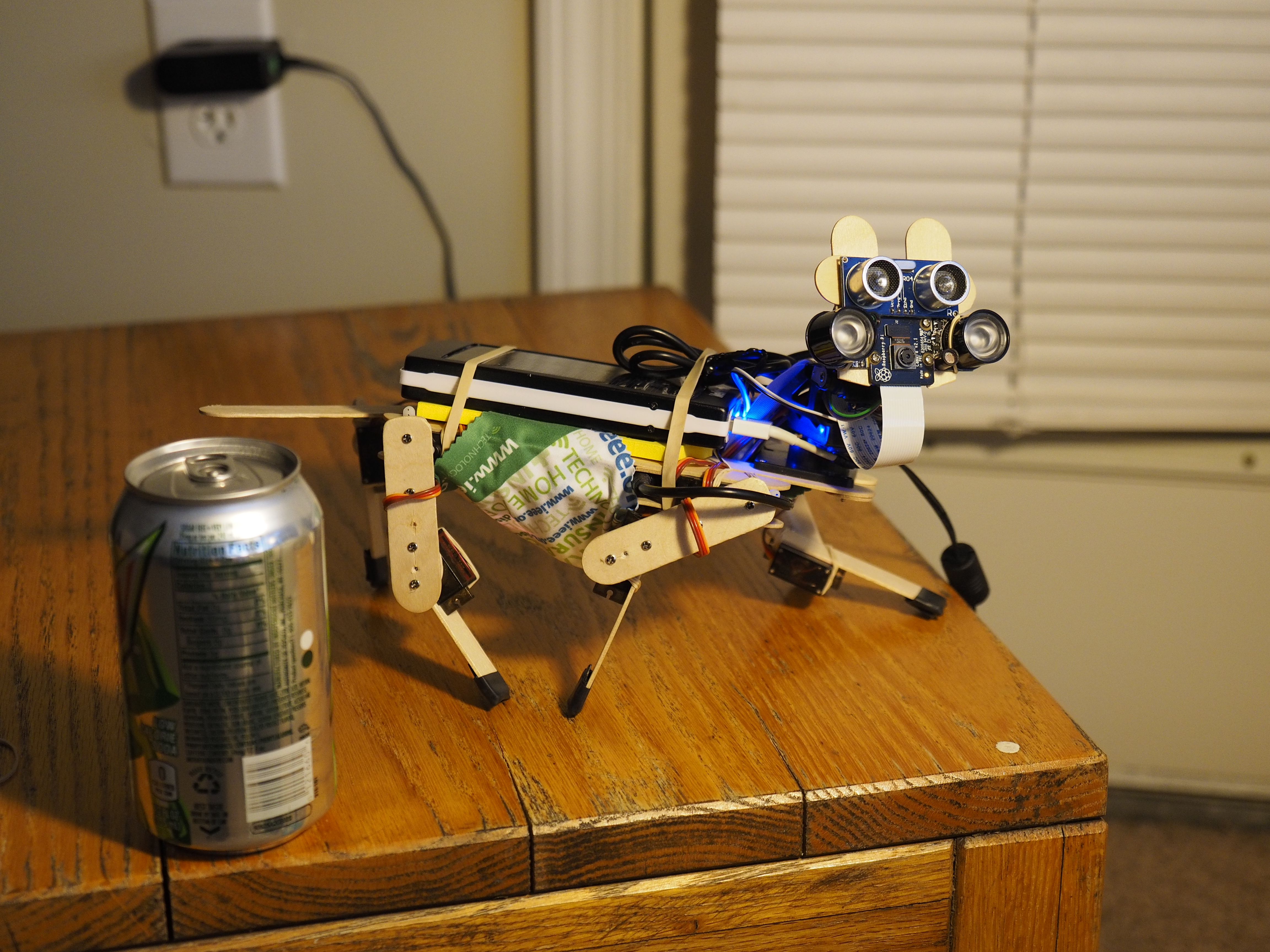
ด้านบนของโมดูลการเคลื่อนที่คือ RasPi โดยที่ Pi จะไม่รับผิดชอบการควบคุมการเคลื่อนไหวของรยางค์อย่างละเอียด แต่มันจะโฟกัสไปที่คำถามที่จริงจังกว่า เช่น "ฉันคือใคร? ฉันมาจากไหน? ฉันกำลังจะไปไหน?" มันจะสร้างความคิดและส่งคำสั่งรูปแบบ String ไปยัง Arduino ที่ทำหน้าที่เป็น Slave อย่างไรก็ตาม คำแนะนำการเคลื่อนที่ยังคงสามารถส่งไปยัง Arduino ได้ในความเร็วที่ช้าลง รีโมทควบคุมโดยมนุษย์จะอยู่ตรงกลางเพื่อดักจับการควบคุมร่างกายของหุ่นยนต์เอง แต่มันจะยังคงรักษาสัญชาตญาณบางอย่างไว้ เช่น การปฏิเสธที่จะกระโดดลงจากหน้าผา
ปัจจุบัน ผมมีต้นแบบที่ใช้งานได้ 2 รุ่น:
* รุ่น Mini เป็นโมดูลการเคลื่อนที่แบบ Arduino สแตนด์อโลนขนาด 8-DoF (รองรับสูงสุด 16-DoF) ซึ่งรวบรวมทักษะท่าทางการเดินที่หลากหลายและการปรับตัวแบบ Real-time โดย Code สามารถใช้งานร่วมกับเวอร์ชันเต็มได้ เพียงแค่เปลี่ยนพารามิเตอร์ตัวเดียว ขนาดในการติดตั้งตรงกับบอร์ด RasPi ดังนั้นมันจึงสามารถเป็น "หมวกขา" (leg-hat) สำหรับโปรเจกต์เดิมของคุณได้ และด้วยการตั้งค่าแบบ "ตัวบรรทุก" (carrier) ที่เสริมประสิทธิภาพ มันสามารถแบกน้ำหนักเพิ่มได้ประมาณ 1 กิโลกรัม (แน่นอนว่าเดินช้าลง) กลุ่มเป้าหมายคือการศึกษา STEM และชุมชน Maker โดยราคาจะใกล้เคียงกับชุดคิตรถหุ่นยนต์ทั่วไป
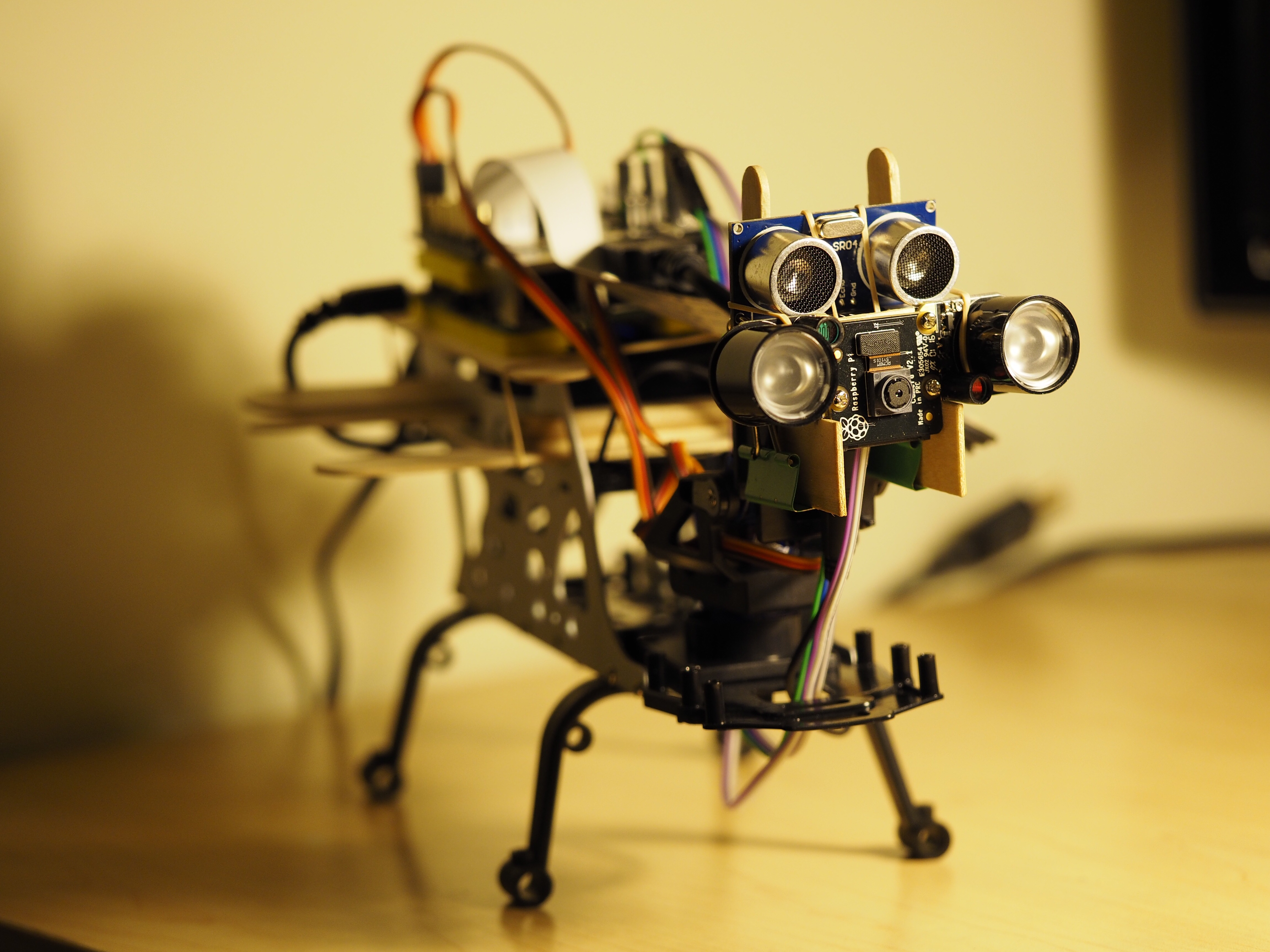
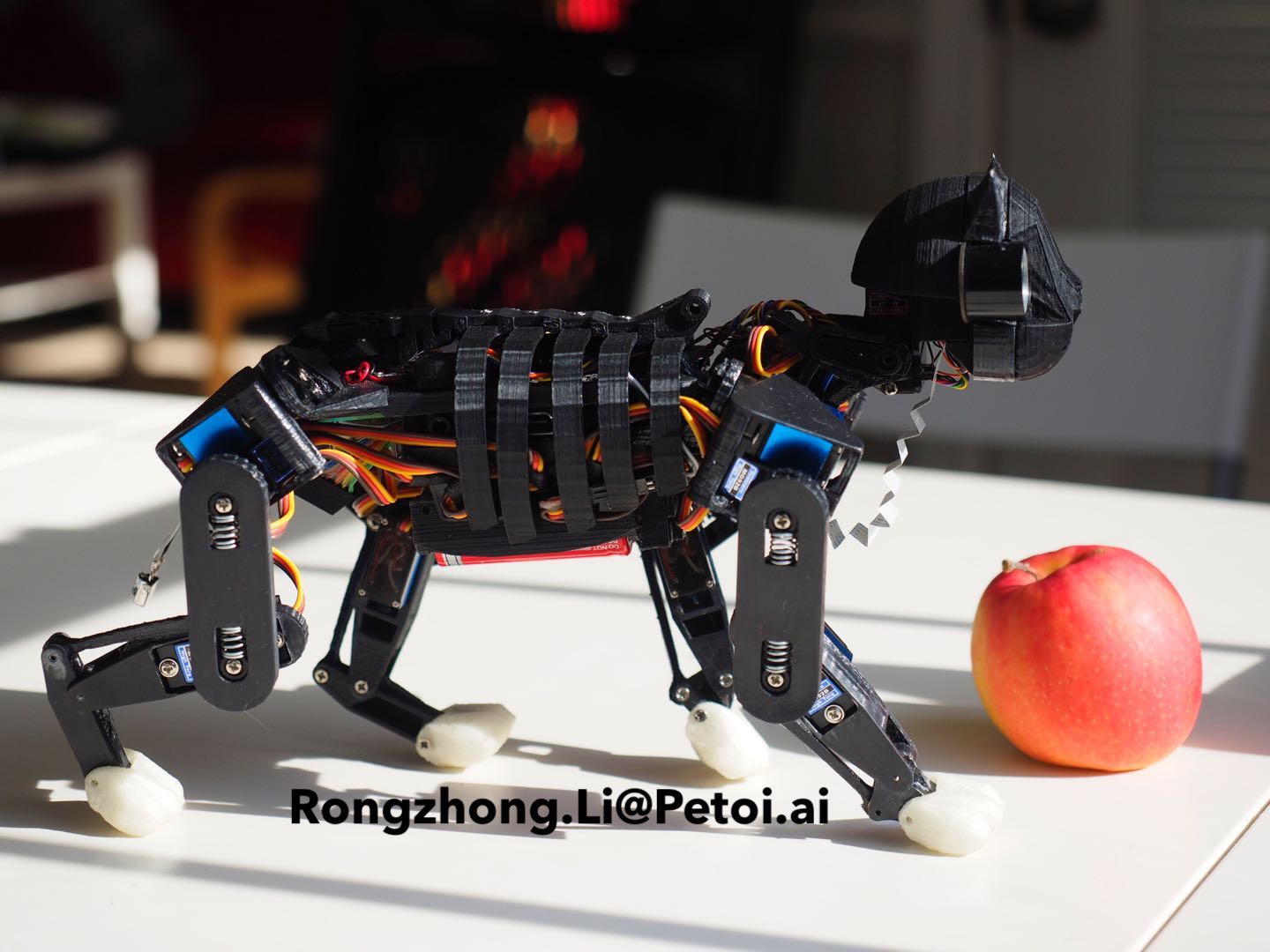
* เวอร์ชันเต็ม (Full version) ใช้ Pi เพื่อการรับรู้ที่เสริมประสิทธิภาพด้วย AI และสั่งการโมดูลการเคลื่อนที่ 16-DoF รุ่นอัปเกรด นอกจาก WiFi และ Bluetooth ของ Pi แล้ว มันยังมีอินเทอร์เฟซสำหรับการตรวจจับการสัมผัสพื้น, การสัมผัส, Infrared, ระยะทาง, เสียง และ Vision สำหรับกลางคืน ทุกโมดูลได้รับการทดสอบบนโครงสร้างที่มีน้ำหนักเบา นอกจากนี้ยังใช้การออกแบบโครงกระดูกแบบ Bionic เพื่อให้มีสัณฐานวิทยาคล้ายกับแมว กลุ่มเป้าหมายคือตลาดผู้บริโภคทั่วไปที่ไม่มีพื้นฐานทางเทคนิคมากนัก คุณสามารถจินตนาการว่ามันคือโทรศัพท์ Android หรือ Alexa ที่มีขา และมี App Store สำหรับส่วนขยายจากนักพัฒนาภายนอก มันสามารถวิ่งต่อเนื่องได้ที่ความเร็วประมาณ 2.6 เท่าของความยาวลำตัวต่อวินาที นาน 60 นาที หรือนั่งสตรีมวิดีโอได้นานหลายชั่วโมง ผมยังสำรองพื้นที่ใต้กระดูกสันหลังไว้สำหรับบอร์ดเพิ่มเติม (เช่น GPS) ผมมีขั้นตอนปกติในการผลิตซ้ำโมเดล แต่ต้องการกระบวนการทางอุตสาหกรรมที่ดีกว่าเพื่อลดแรงงานคน ผมคาดว่าราคาจะใกล้เคียงกับสมาร์ทโฟนสักเครื่อง
* ผมยังมีเวอร์ชันที่เลิกใช้แล้วซึ่งใช้เพียง Pi ในการควบคุมทั้ง AI และการเคลื่อนที่ Code ทั้งหมดเขียนด้วย Python ซึ่งการเคลื่อนไหวทำได้ไม่ดีนักหากรันงาน AI ที่หนักหน่วง
ผมซื้อ RasPi เครื่องแรกในเดือนมิถุนายน 2016 เพื่อเรียนรู้การเขียน Code ควบคุมฮาร์ดแวร์ เพื่อแสดงความดีใจตอนที่ผมทำให้ LED สว่างขึ้นครั้งแรกด้วยสัญญาณจาก Pi ผมได้เขียนบทกวีจีนไว้ว่า:
启蒙
夜闻禽兽想炊烟,斑白胼胝枉瘦田。
仙界私厨失圣火,人间春事已燎原。
ซึ่งแปลได้ว่า: "เสียงคำรามของสัตว์ยามค่ำคืนย้ำเตือนถึงจุดเริ่มต้นของอารยธรรมโบราณ ชายชราผมขาวที่มีมือหยาบกร้านตรากตรำทำงานหนักเพียงเพื่อปลูกพืชไม่กี่ชนิดบนดินที่แห้งแล้ง วันหนึ่งเปลวไฟที่เคยรับใช้ในครัวส่วนตัวของพระเจ้าได้ตกลงมาจากสวรรค์ ในไม่ช้า เกษตรกรรมแบบถางพงชิงเผาก็เจริญรุ่งเรืองไปทั่วแผ่นดิน"
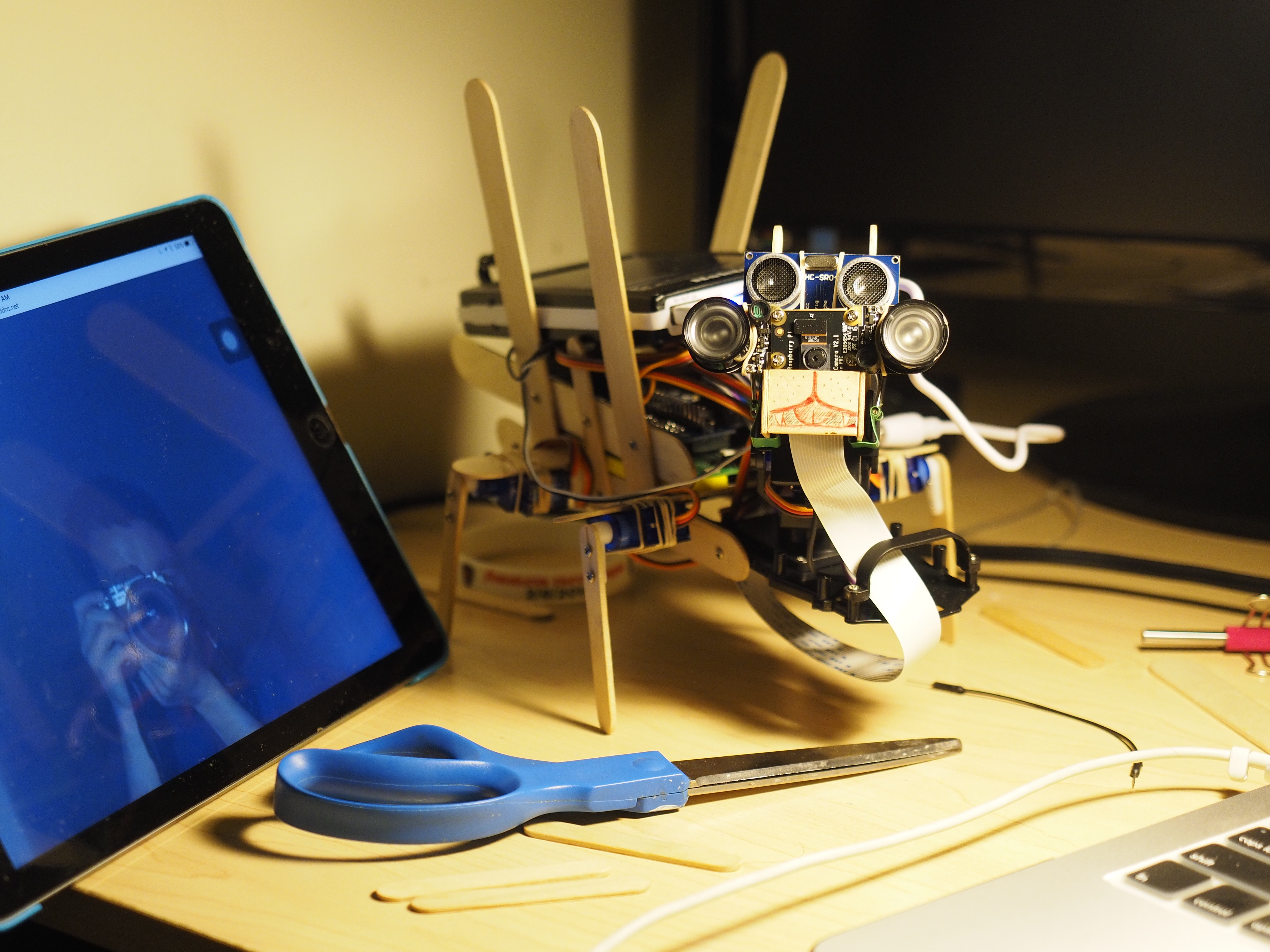
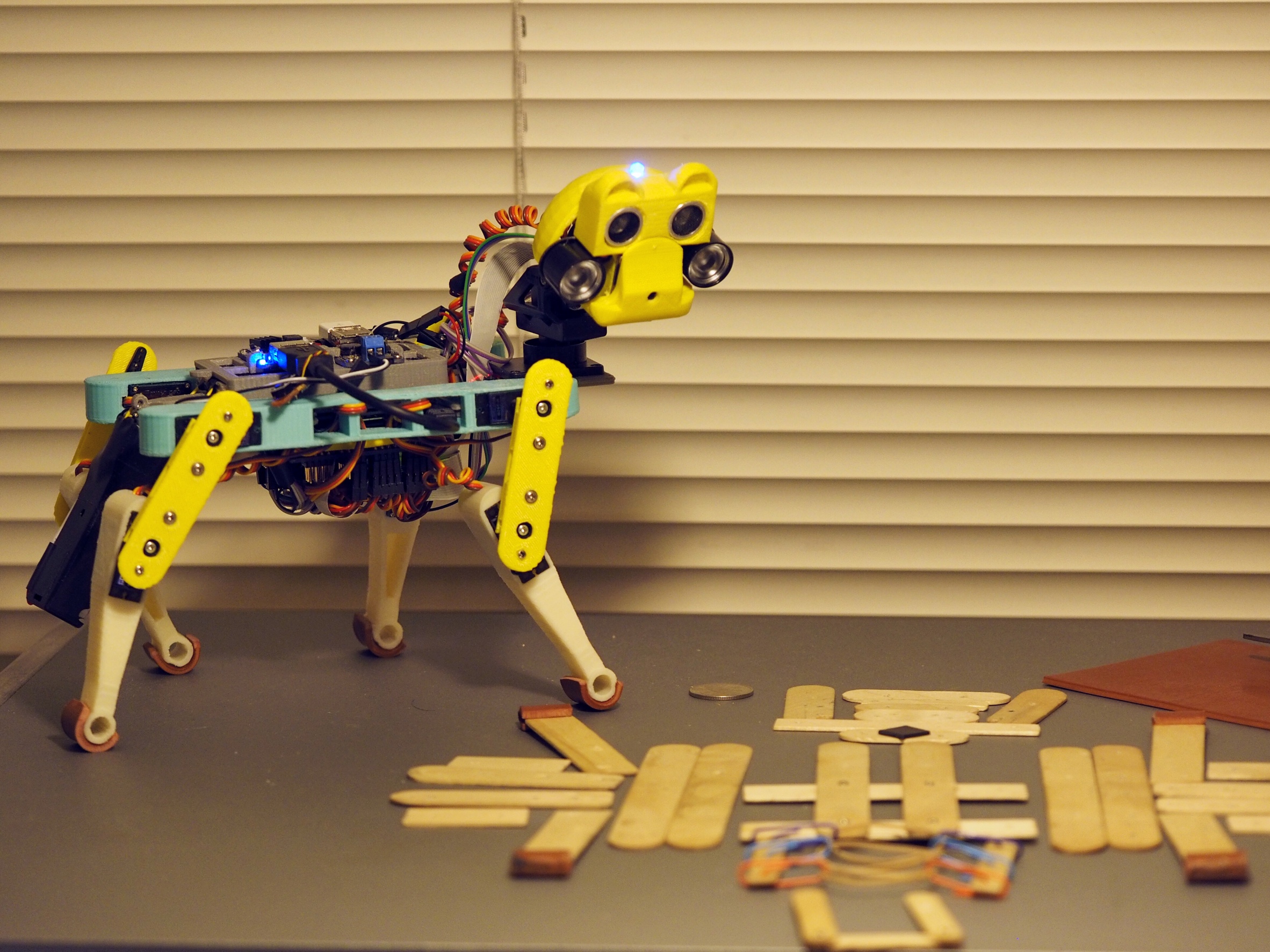
หุ่นยนต์ตัวนี้เปรียบเสมือนสนามเด็กเล่นของผมในการเรียนรู้ส่วนประกอบทั้งหมดในชุดคิต RasPi เริ่มต้น ผมเริ่มจากไม้ไอศกรีม แล้วเปลี่ยนมาเป็นโครงที่พิมพ์จาก 3D Printer เพื่อประสิทธิภาพและสัณฐานวิทยาที่ดีที่สุด ต่อมามีการนำ Arduino เข้ามาใช้ในเดือน ก.ค. 2017 เพื่อการเคลื่อนไหวที่ดีขึ้น การปรับปรุงหลัก 7 ครั้งเกิดขึ้นระหว่าง ก.ค. 2016 ถึง ก.ย. 2017 ไม่มีการก้าวหน้าที่สำคัญนักตั้งแต่เดือนกันยายนปีที่แล้ว เนื่องจากผมถูกดึงความสนใจจากหน้าที่การงานที่เพิ่มขึ้น การก่อตั้งบริษัท และการเขียนสิทธิบัตร



ตอนนี้ผมกำลังสอนวิชาหุ่นยนต์ในมหาวิทยาลัยโดยใช้ชุดคิต Mini ผมหวังว่าจะขายชุดคิตได้มากขึ้นเพื่อทดสอบตลาดและสร้างรายได้เพื่อให้โปรเจกต์ดำเนินต่อไปได้ เวอร์ชันเต็มยังคงต้องได้รับการปรับแต่ง ผมกำลังสมัครเข้าร่วมโครงการบ่มเพาะธุรกิจหลายแห่งและอาจจะลองใช้ Indiegogo ขึ้นอยู่กับว่าผมจะได้รับการสนับสนุนที่ดีที่สุดจากที่ไหน ผมอาจจะเริ่มทำธุรกิจหรือทำให้โปรเจกต์นี้เป็น Open-source ทั้งหมด แม้จะเป็นผลิตภัณฑ์เชิงพาณิชย์ Code ส่วนใหญ่ก็จะถูกเปิดเผยพร้อมกับการขายชุดคิต
ผมเชื่อในพลังของ Open-source หากทุกคนสามารถหาหุ่นยนต์มาสักตัวแล้วเริ่มบัดกรีและเขียน Code แทนที่จะเป็นเพียงผลิตภัณฑ์สำเร็จรูป แต่มันแสดงให้เห็นถึงศักยภาพที่ได้รับการสนับสนุนจากชุมชน Maker ที่กำลังเติบโต ผู้ใช้สามารถมุ่งเน้นไปที่การเขียน Code ในส่วนการเคลื่อนที่ (Arduino ด้วยภาษา C) หรือส่วน AI (Pi ด้วย Python) และทั้งสองส่วนสามารถสื่อสารกันผ่าน String tokens นอกจากนี้ยังง่ายต่อการสอนภาษาท่าทางและพฤติกรรมใหม่ๆ ด้วย Code เพียงไม่กี่บรรทัด ทุกคนที่มีความรู้พื้นฐานเกี่ยวกับ Arduino หรือ RasPi สามารถจินตนาการถึงการนำไปใช้งานได้หลากหลาย ผมเบื่อกับรถรูปสัตว์มาหลายปีแล้ว ตอนนี้เด็กๆ สามารถเรียนรู้ฟิสิกส์และการเขียน Code บนของเล่นประเภทใหม่ได้ ผู้เชี่ยวชาญด้านหุ่นยนต์สามารถมุ่งเน้นไปที่ Algorithm การเดินบนแพลตฟอร์มที่ราคาถูกลงมาก นักพัฒนาซอฟต์แวร์สามารถเขียนแอปพลิเคชันเสริม AI บนหุ่นยนต์ที่เหมือนสัตว์เลี้ยง แทนที่จะเป็น "iPad ติดล้อ"
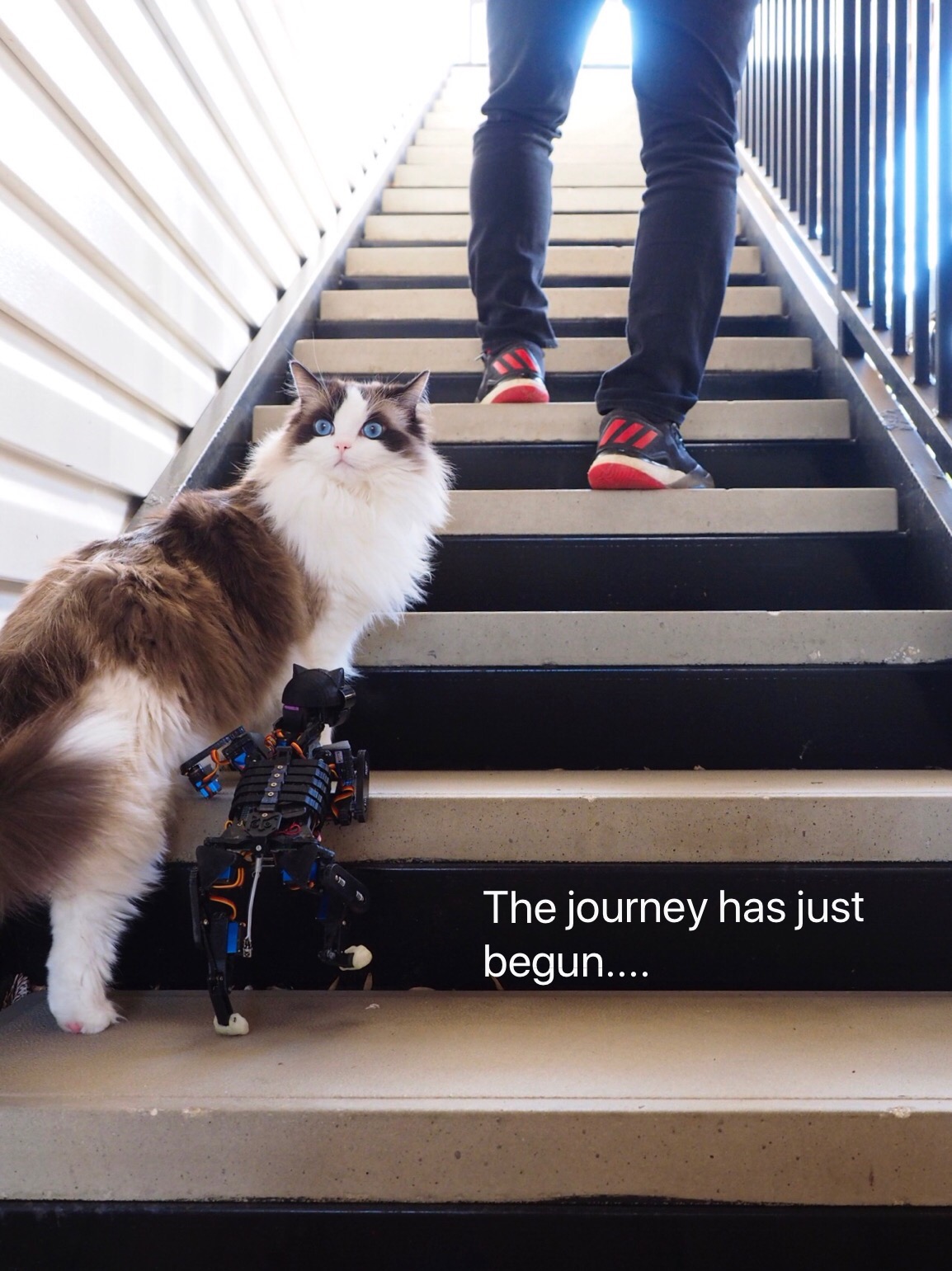
หากคุณสนใจเจ้าแมวตัวนี้และต้องการมีไว้ในครอบครอง โปรดกดไลก์วิดีโอและแชร์ต่อ ผมยินดีรับฟังความคิดเห็นของคุณเพื่อทำให้มันดียิ่งขึ้น การสนับสนุนของคุณจะเป็นตัวกำหนดว่ามันจะวางจำหน่ายในตลาดได้เร็วแค่ไหนครับ
------------
ผมรู้สึกทึ่งกับเสียงตอบรับที่อบอุ่นจากพวกคุณ มันเป็นกำลังใจที่ดีมากจริงๆ ครับ!
ผมอาจจะลืมตอบข้อความบางส่วนไป ดังนั้นผมขอตอบคำถามที่พบบ่อยไว้ที่นี่ครับ:
----
* การแบ่งปันไฟล์ STL?
- หุ่นยนต์แมวเวอร์ชันเต็มต้องการโครงสร้างที่พิมพ์อย่างแม่นยำหลายชิ้นด้วย Filament หลากหลายชนิด ต้องใช้เวลาประมาณสองวันในการพิมพ์และกระบวนการหลังการพิมพ์ (รวมถึงการใช้ Acetone) และต้องประกอบด้วยอุปกรณ์เสริมและเครื่องมือเฉพาะทาง กลไกบางอย่างถูกออกแบบมาให้มีความละเอียดน้อยกว่า 0.2 มม. และตอนนี้ผมกำลังปรับจูนพวกมันด้วยการตะไบอย่างระมัดระวัง แม้แต่การเปลี่ยนวิธีการบัดกรีหรือเดินสายไฟก็อาจทำให้เกิดปัญหาในการประกอบได้
ผมคิดว่าวิธีที่ประหยัด (และปลอดภัย) ที่สุดคือการลงทุนในแม่พิมพ์ฉีด (Injection mold) ราคาแพงแล้วเข้าสู่การผลิตจำนวนมาก อย่างน้อยก็สำหรับชิ้นส่วนกลไกที่สำคัญ เมื่อผมปล่อยไฟล์และข้อกำหนดต่างๆ ออกไป คุณก็น่าจะเห็นด้วยกับจุดนี้ครับ
และผมต้องการเวลาในการจัดทำเอกสารประกอบการใช้งานที่ดี เวอร์ชัน Mini น่าจะออกมาก่อนหน้านั้นมากครับ
----
* การแบ่งปัน Code?
- โปรเจกต์นี้ได้รับการเผยแพร่บน https://github.com/PetoiCamp/OpenCat.
----
* Open-source?
- Open-source ยังต้องการการดำเนินงานเชิงพาณิชย์เพื่อให้คงอยู่ได้อย่างมั่นคง ผมจะพยายามอย่างเต็มที่เพื่อรักษาสมดุลทุกอย่าง สิ่งเหล่านี้อยู่นอกเหนือความเชี่ยวชาญของผมและผมต้องเรียนรู้ ผมต้องสร้างรากฐานและเลี้ยงดูครอบครัว แทนที่จะอยู่อย่างโดดเดี่ยวในต่างแดน ขอโทษด้วยนะครับทุกคน... ผมยุ่งอยู่กับการสอนในมหาวิทยาลัยถึง 5 หน่วยกิตเพียงเพื่อจ่ายบิลต่างๆ เท่านั้นเอง!
ผมหวังว่าจะทำให้โปรเจกต์นี้เลี้ยงตัวเองได้แทนที่จะต้องขอรับบริจาคทุกปี สำหรับระบบที่ซับซ้อนเช่นนี้ ผมมั่นใจว่าการผลิตจำนวนมากจะทำให้ต้นทุนต่อหน่วยต่ำกว่าความพยายามในการทำ DIY เอง เมื่อบรรลุเป้าหมายนั้น นักประดิษฐ์ยังคงสามารถสร้างโปรเจกต์ที่ท้าทายนี้จาก Source Code (และอุปกรณ์เสริมหลายสิบชิ้นจากร้านค้าออนไลน์) ในขณะที่คนทั่วไปสามารถเพลิดเพลินกับผลิตภัณฑ์ได้ในราคาที่ต่ำลง
----
คุณสามารถสั่งซื้อโมเดลที่ผลิตจำนวนมากทั้งสองรุ่นของเราที่ต่อยอดมาจาก OpenCat ได้ที่ร้านค้าออนไลน์อย่างเป็นทางการ: www.petoi.com/store
สนับสนุนเพื่อรับ Source Code หรือแอปพลิเคชันสำหรับโปรเจกต์นี้
