Expert
โปรเจกต์ robo dog
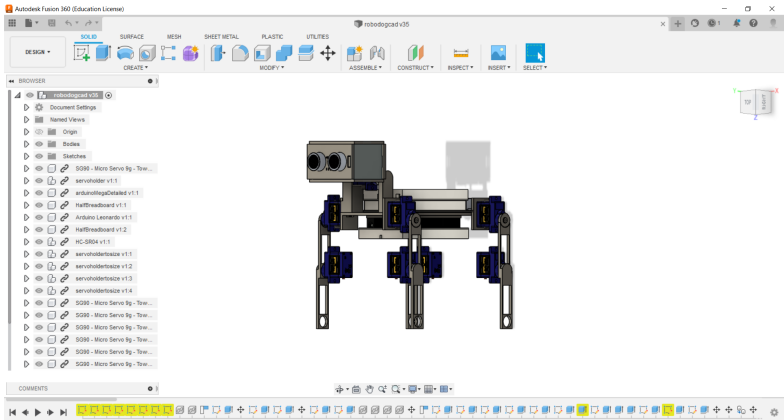
โปรเจกต์ 3 สัปดาห์: Robot 4 ขา ที่สามารถสำรวจสภาพแวดล้อมได้แบบ autonomously

โปรเจกต์ 3 สัปดาห์: Robot 4 ขา ที่สามารถสำรวจสภาพแวดล้อมได้แบบ autonomously

▶ กดเพื่อดูวิดีโอสาธิตโปรเจกต์
Pseudocode:
- 2 stop commands: หยุดเมื่อมีสิ่งกีดขวาง + หยุดเมื่อกดปุ่ม red button
- ถ้าเงื่อนไข stop conditions อย่างใดอย่างหนึ่งเป็นจริง: stop (เดินถอยหลัง, ปรับตำแหน่งตัวเอง)
- else: เดินไปข้างหน้า
- ฟังก์ชันอื่นๆ: speed control (สีเขียวเพิ่มความเร็ว, สีเหลืองลดความเร็ว, สีแดง stop และ reset ความเร็วกลับเป็นค่า default)
สนับสนุนเพื่อรับ Source Code หรือแอปพลิเคชันสำหรับโปรเจกต์นี้
ประเมิน Project
เอาฟอร์มยาวออกจากท้ายหน้า Project แล้ว เหลือเป็นปุ่มให้กดไปกรอกหน้าเดียว ตัวใหญ่ เว้นบรรทัดเยอะ อ่านง่ายกว่า
รีวิวจากคนใช้งานจริง
ถ้าเคยสั่งงาน เคยอ่านหน้านี้แล้วได้ประโยชน์ หรือมีข้อเสนอแนะ ฝากรีวิวไว้ได้เลย
ยังไม่มีรีวิวบนหน้านี้ ถ้าเคยใช้งานหรือมีข้อเสนอแนะ เขียนเป็นคนแรกได้เลย
