Expert
โปรเจกต์ Robotic Claw
หยิบและวางวัตถุจากระดับความสูงต่างๆ ในพื้นที่ 180 degrees
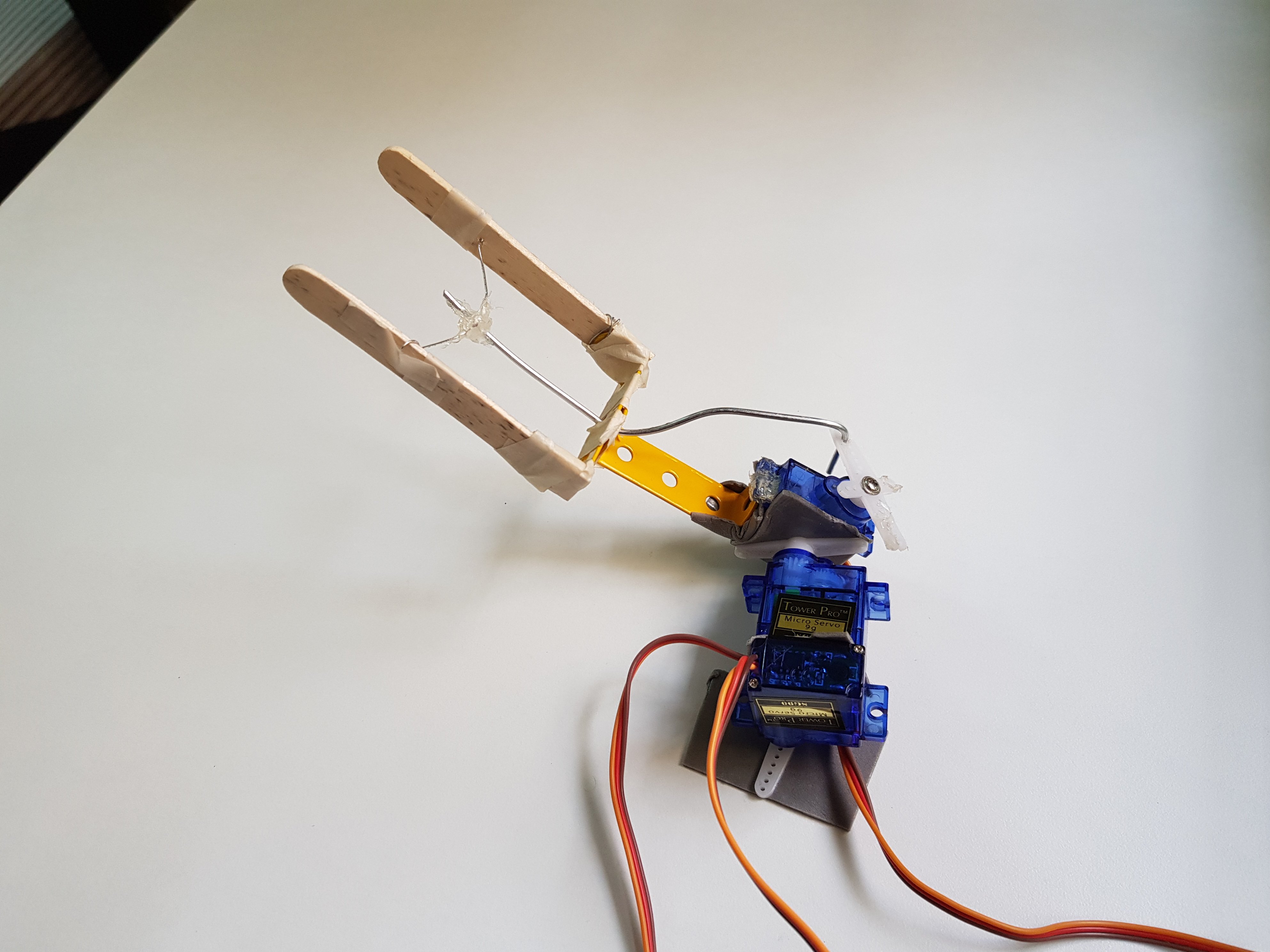
หยิบและวางวัตถุจากระดับความสูงต่างๆ ในพื้นที่ 180 degrees

▶ กดเพื่อดูวิดีโอสาธิตโปรเจกต์
คุณคงเคยเห็นแขนกลที่พิมพ์จากเครื่องพิมพ์ 3D เจ๋งๆ ที่ใช้ตัดกระดาษ วาดรูปพอร์ตเทรต หรือเล่น tic tac toe ในคอมมูนิตี้ของ Arduino มาบ้างแล้วล่ะ ครั้งนี้ผมเลยลองดูว่าจะทำได้ไกลแค่ไหนโดยใช้แค่เศษวัสดุอย่างไม้ไอศกรีม
ตัวหนีบมันเบี้ยวไปหน่อยเพราะผมพยายามจะให้มันยกของหนักน่ะ :)
มาดูขั้นตอนการทำกันเลยดีกว่า..
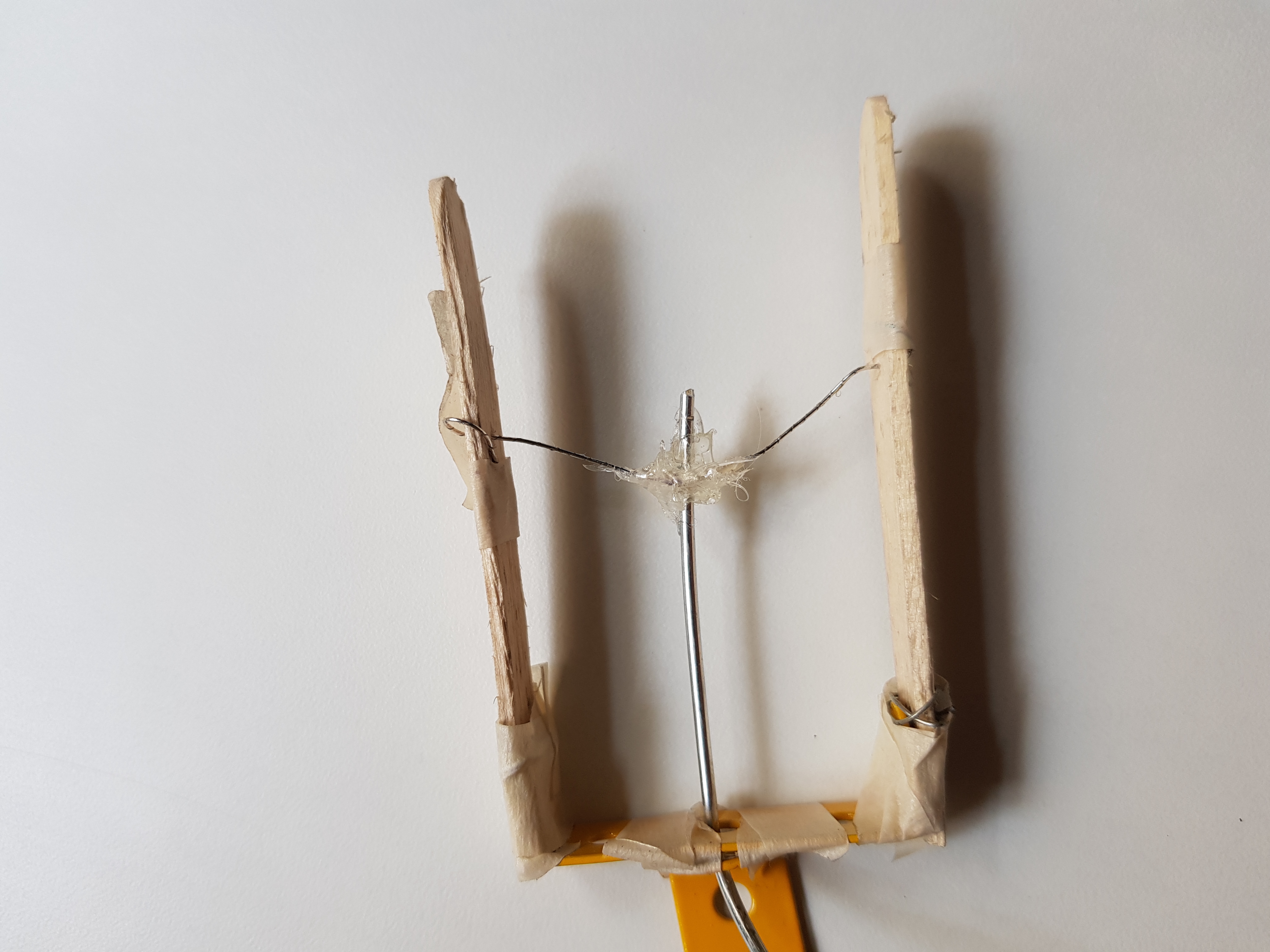
นำไม้ไอศกรีม 2 อัน (หรืออะไรที่คล้ายกัน) มาเชื่อมต่อกันด้วยลวดเส้นเล็กๆ ตรงกลางของลวดให้ใช้ปืนกาวติดแท่งโลหะเข้าไป แท่งโลหะนี้จะเคลื่อนที่ไปข้างหน้าและข้างหลังเพื่อทำให้ไม้ไอศกรีมอ้าออกและหุบเข้า คุณควรใช้แท่งโลหะที่แข็งแรงหน่อย เพราะด้ายหรือลวดอ่อนๆ จะไม่มีแรง "ผลัก" ที่จำเป็นในการเปิดตัวหนีบ จากนั้นเชื่อมส่วนปลายของไม้ไอศกรีมเข้ากับฐานรองรับที่แข็งแรง (ผมใช้ชิ้นส่วนโลหะจากของเล่น)
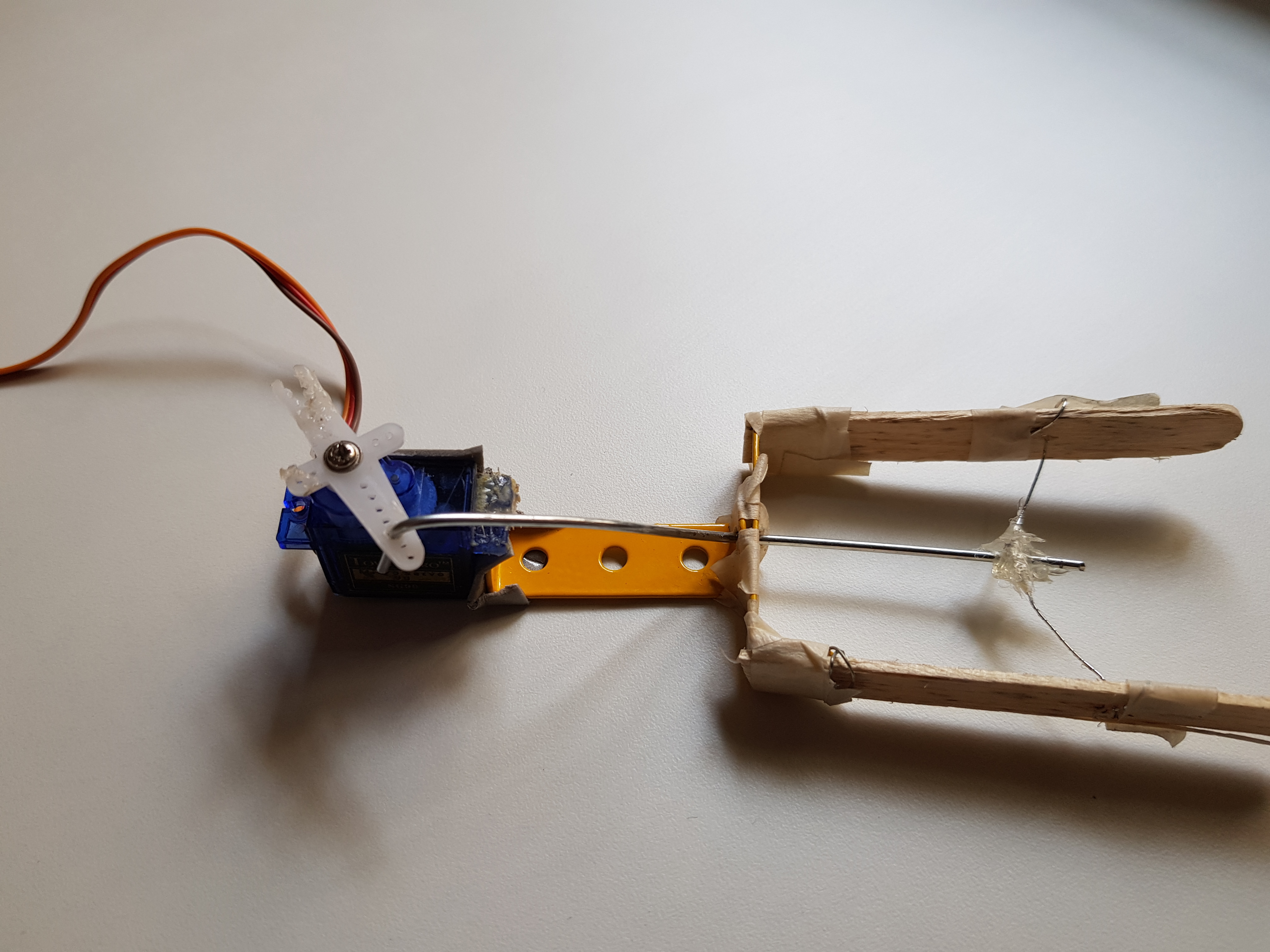
เชื่อมฐานของ Servo เข้ากับชิ้นส่วนโลหะ จากนั้นสอดแท่งโลหะผ่านรูของ Servo Horn ผมต้องใช้ตะปูตอกผ่านรูเพื่อให้มันกว้างพอที่จะใส่ลวดเส้นหนาเข้าไปได้
ประกอบ 2 Servos เข้าด้วยกันตามลักษณะที่แสดงในรูปด้านบน มอเตอร์ตัวทางขวาจะทำหน้าที่หมุนแขนกลทั้งหมดไปยังตำแหน่งต่างๆ ในขณะที่อีกตัวจะใช้สำหรับเลื่อนตัวหนีบขึ้นและลง
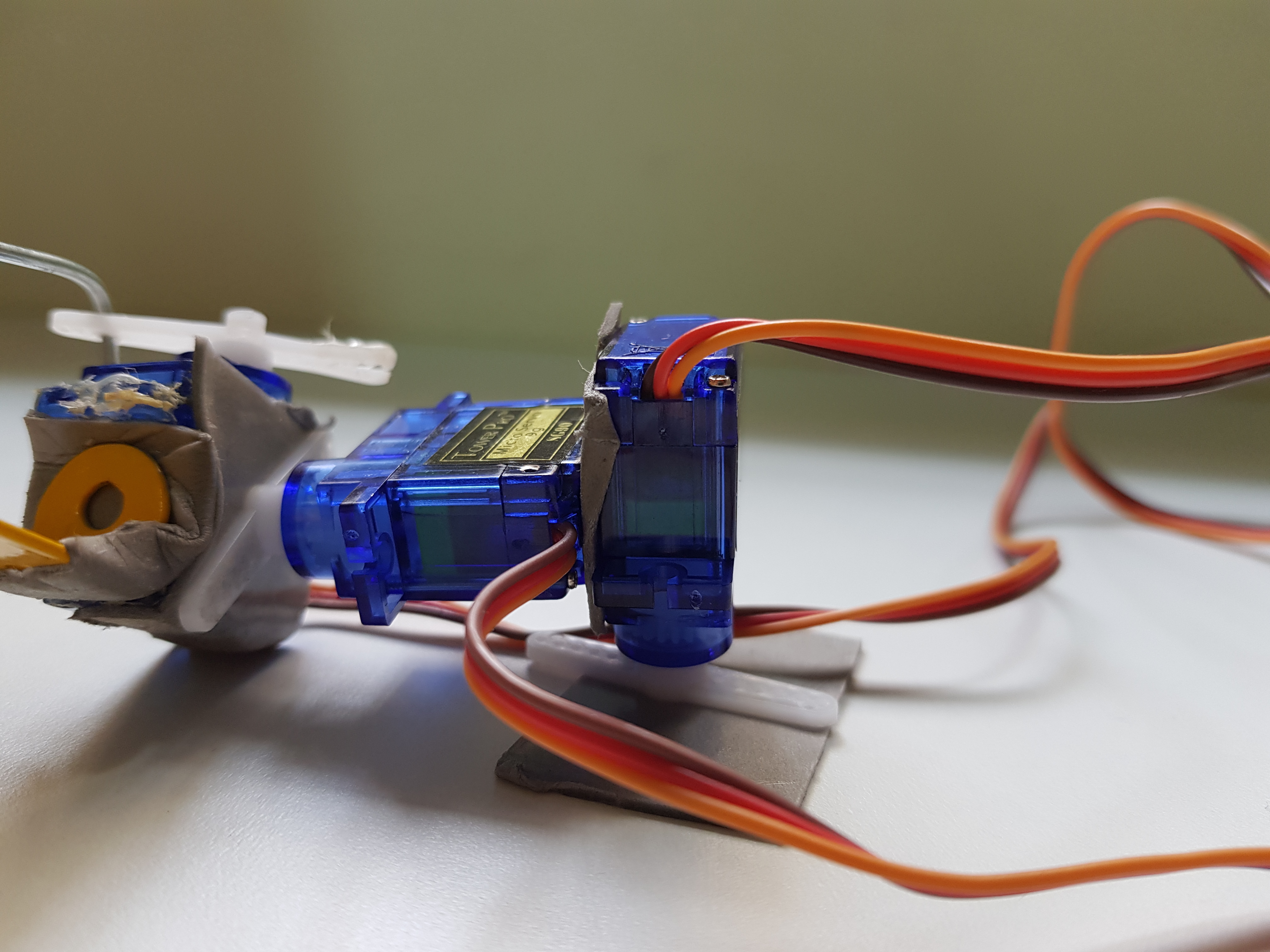
ใกล้จะเสร็จแล้วครับ ยึด Servos เข้าด้วยกันและยึด Horn ของมอเตอร์ตัวขวาสุดเข้ากับพื้นให้แน่นตามที่แสดง เทปกาวสองหน้าจะมีประโยชน์มากในขั้นตอนนี้
ก่อนที่คุณจะเริ่มเขียนโปรแกรม คุณควรรู้ก่อนว่าผมได้เขียน Code ไว้ล่วงหน้าเพื่อให้ตัวหนีบเคลื่อนที่ไปยังตำแหน่งที่กำหนดและหยิบวัตถุขึ้นมา มันยังไม่สามารถระบุตำแหน่งของสิ่งของได้เอง บางทีคุณอาจจะลองสร้างเวอร์ชันที่ล้ำกว่านี้โดยการเพิ่ม Sonar Sensors เพื่อตรวจจับวัตถุ ซึ่งจะช่วยให้แขนกลเคลื่อนที่ไปตามตำแหน่งนั้นๆ ได้
ขอบคุณที่ติดตามอ่านและขอให้โชคดีครับ!
สนับสนุนเพื่อรับ Source Code หรือแอปพลิเคชันสำหรับโปรเจกต์นี้
