Project title: 2-Axis driver for stepper motors with the FlySky RC
This Camera Crane Control project presents the evolution of developing a Precision Motion Control system using Stepper Motors as the primary actuators. The development is divided into 5 phases to enhance capabilities from a basic analog system to a wireless system with Telemetry feedback and automatic stabilization.
Overview of the System and Key Components
The core of this system is the selection of Stepper Motors combined with the high-power D8060H (6A) driver, which can supply up to 6 Amps of current and supports a wide voltage range. This allows it to stably drive heavy cranes and cameras with consistent Torque.
Phase 1: Basic Control System and Power Management
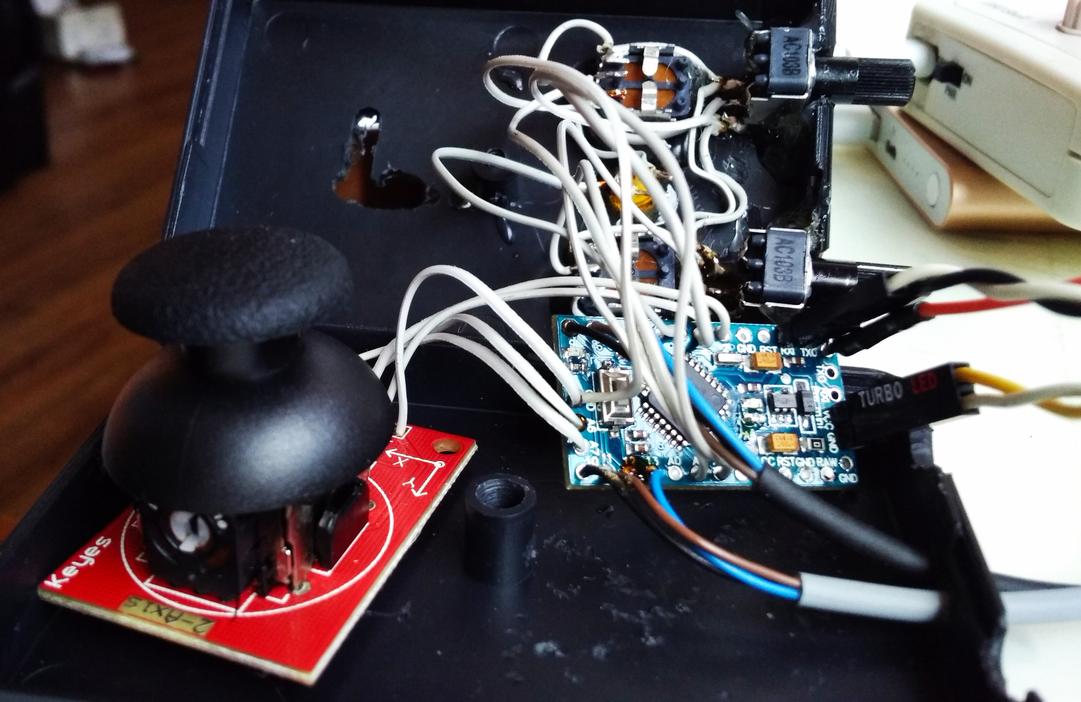
In the initial phase, the control was designed for simplicity using a 2-axis Joystick for Pan and Tilt control, with the following key features:
- Real-time Adjustment: Two separate Potentiometers are installed per motor to set the Maximum Speed and Acceleration. This allows the operator to fine-tune the camera's smoothness according to the task at hand.
- Low Power Design: For extended battery life, the Microcontroller's clock speed was reduced to 8MHz and operated at 4.5V. It also includes an Automatic Shutdown function that cuts power if there is no movement for more than 5 minutes.
- Limitations: In this phase, the maximum pulse frequency was 200Hz, suitable only for low to medium-speed movements.


Phase 2: Developing Drive Logic with CTC Mode
To achieve "Cinematic" or professional-level smooth motion, the pulse generation logic was entirely rewritten:
- Hardware Timers: The CTC (Clear Timer on Compare Match) mode of Timer 1 and Timer 2 in the processor was chosen to generate precise frequency signals at the hardware level, reducing Jitter caused by software processing.
- High-Frequency Control: Frequencies from 2kHz to 16kHz can be achieved. When combined with high Microstepping settings on the D8060H driver, this enables the motor to rotate smoothly, quietly, and reduces vibrations transmitted to the camera.
Phase 3: Transition to a Wireless System (RC Integration)
To increase the operational freedom of the cinematographer, the FlySky RC (radio control) remote control system was implemented to replace cables, allowing the crane to be controlled remotely without location constraints.


Phase 4: Protection System and Telemetry Feedback
With remote control, safety is paramount. In this phase, a Feedback Control system was added:
- Multi-turn Potentiometer: Installed on the motor's rotating shaft to detect its true position, allowing the system to set Soft Limits to stop the motor before a Mechanical Crash occurs.
- Smart Telemetry Hack: A prominent feature is sending Position values back to be displayed on the FlySky remote's screen by mapping values from the Arduino's Analog Input to a Telemetry channel. Although the remote's limitations force it to display units as "temperature" or "RPM (Revolutions Per Minute)", users can read the values as a percentage (%) to immediately assess the crane's position.
Phase 5: Future Towards Active Stabilization System
In the final stage, the development team plans to install Accelerometer/Gyroscope sensors to create an automatic stabilization system (Gimbal Functionality). This will help the camera maintain a Level orientation at all times, even if the crane moves rapidly or experiences external vibrations.
This project serves as an excellent example of applying Embedded Engineering knowledge to solve real-world problems, from power management and advanced Hardware Timers to wireless data communication and Closed-loop Feedback, to create a tool for professional production work.