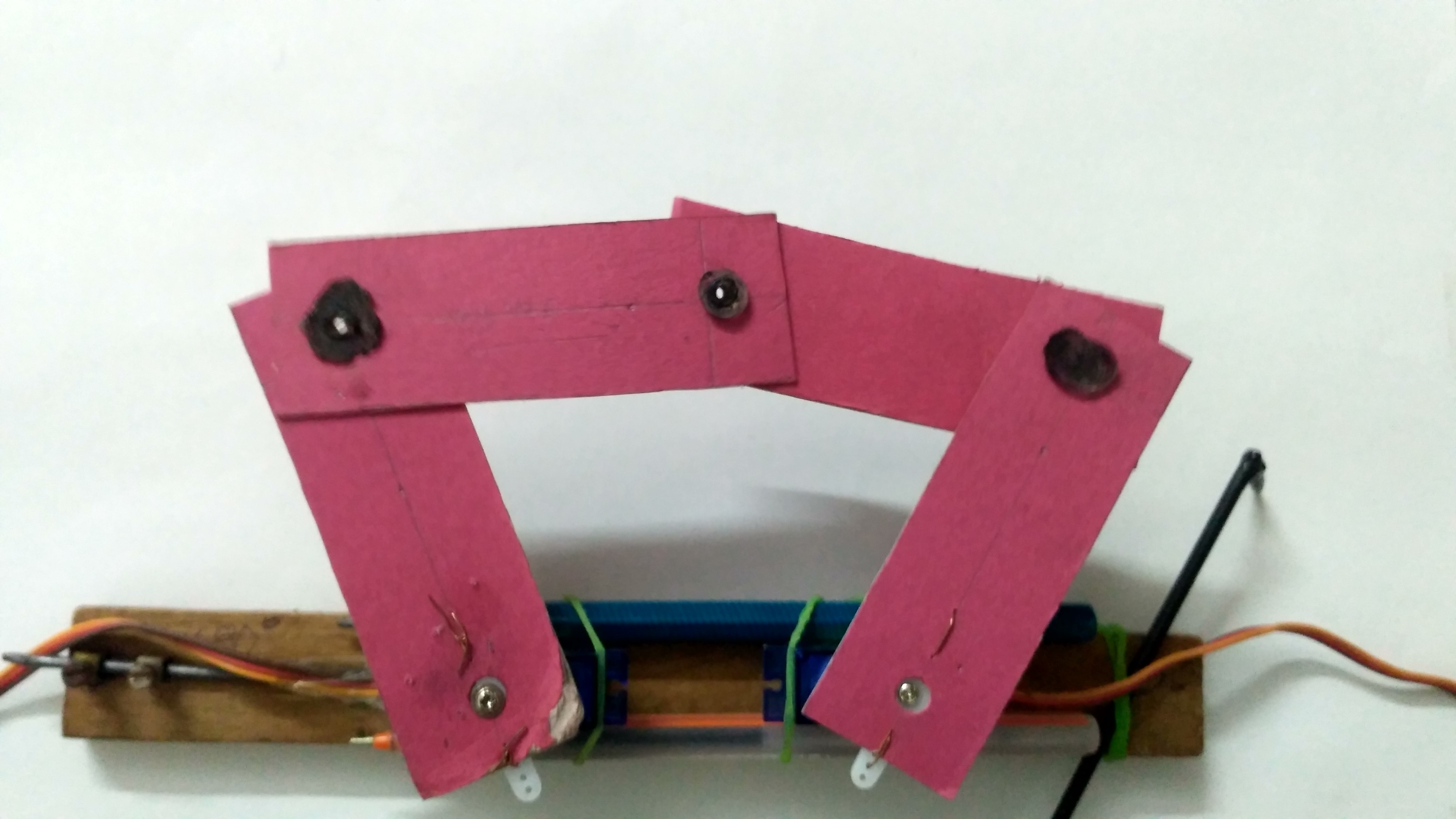
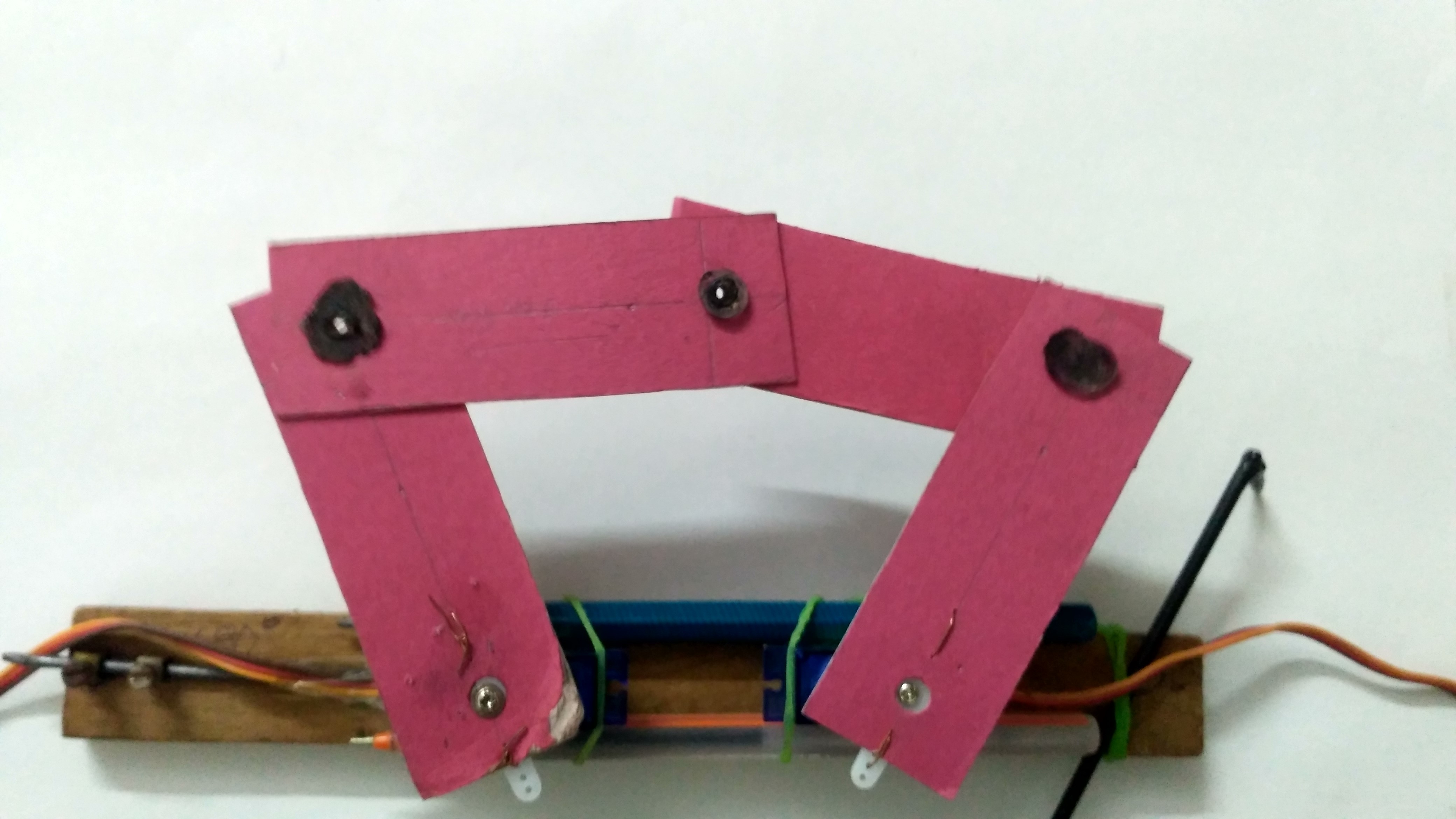
This is a 2D delta robot that has 4 moving links and 1 stationary link. This makes it a 5 bar mechanism. It is powered by two servomotors. The two servo motors are able to move the links such that the center point of the link can trace/draw any shape.
I got the inspiration from the 3d delta robot IRB 360 Flexipicker from ABB. This robot from ABB had 3 motors so, it can work in 3 dimensions. I didn't have the proper hardware and motors. So, I decided to continue it in 2 dimensions with only 2 motors.
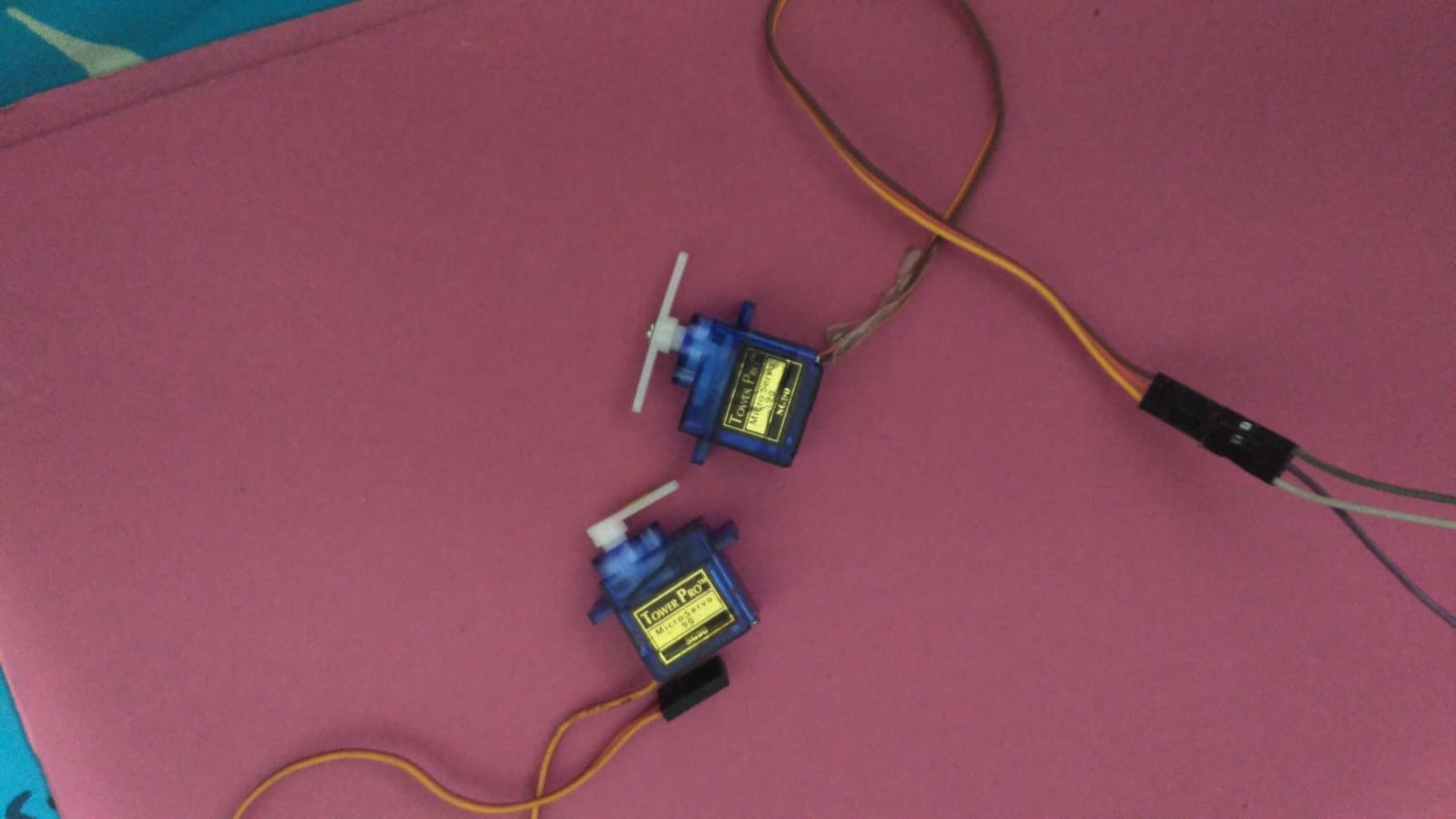

The servo motors should be mounted on a fixed surface. I used a wooden bar and rubber band to secure them in place.
Make 4 links of equal lengths. Adjust the motors such that the distance between their rotor is equal to the length of the link. Punch holes at its ends. Then join them with each other to make a long chain. Connect the endpoints of the chain to the horns of the servo motor.
Technical Implementation: Parallel Kinematics
The robot's speed and agility come from its unique mechanical design. Unlike a traditional serial-link robot, the delta robot's end-effector is supported by parallel arms. This distributes the weight of the motors, giving the robot high acceleration and precision.
Software Logic & Inverse Kinematics
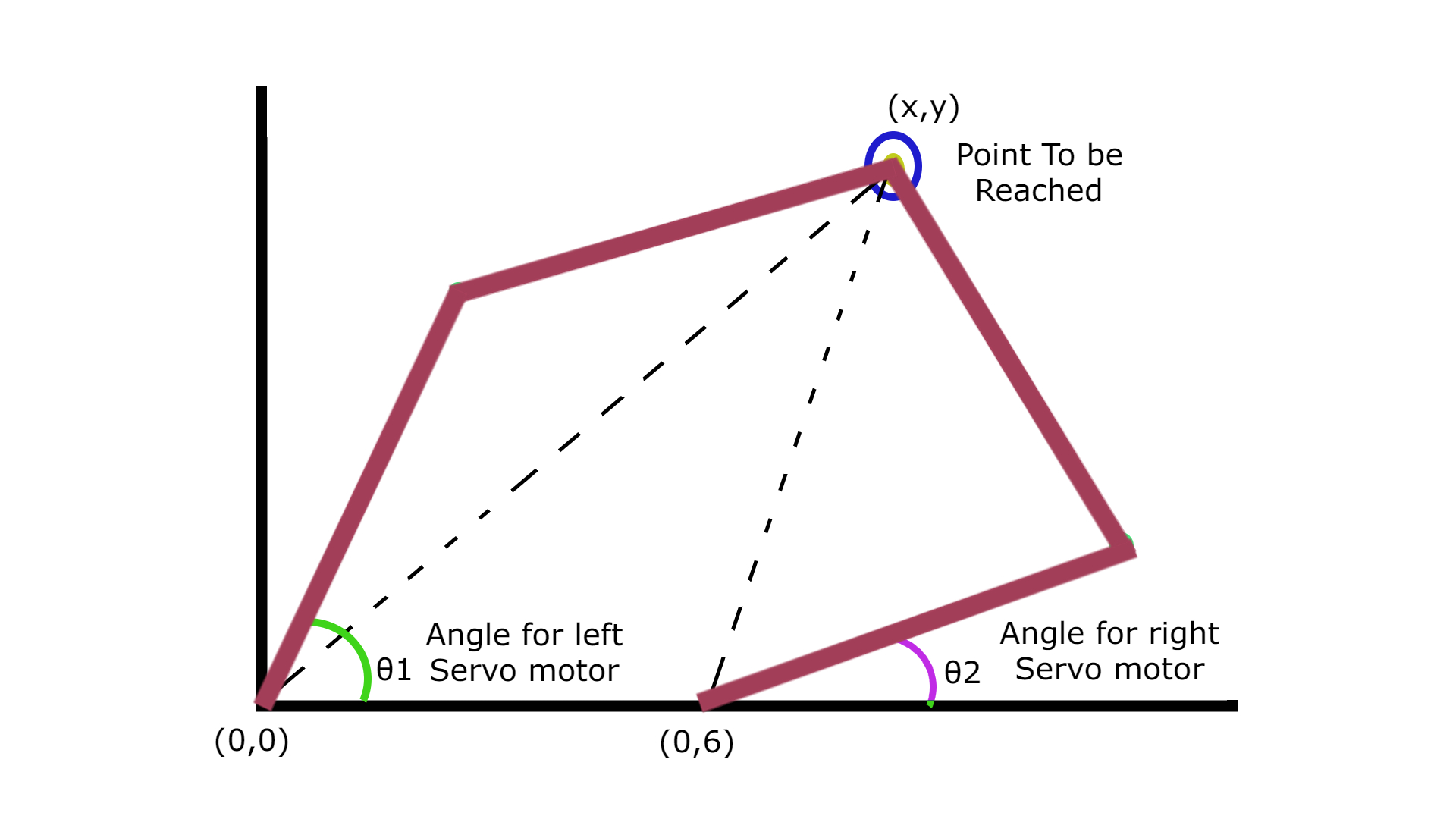
The inverse kinematics method is used to calculate the angle of each servo motor. The point on the plane is (x, y) and to reach that point each motor has to be at a certain angle. That angle is calculated by trigonometry. All this is done in the code.
The Arduino code is the heart of the robot's motion:
- Target Position: The robot receives a target (X, Y) position in its workspace.
- Inverse Kinematics: The code solves a set of geometric equations to find the precise angle for each of the two servo motors.
- Execution: The Arduino sends the calculated PWM signals to each servo (e.g.,
servo1.write(angle1),servo2.write(angle2)).
Thus passing coordinates to a function. All the calculation is done and the respective angle is returned.
We tried making straight lines, circles & squares. But due to improper hardware and unreliable cheap servo the shape to be drawn wasn't accurate. But this is just a technology demonstrator.
Future Expansion
This project is a perfect testbed for learning about inverse kinematics and robotic motion control. Potential future expansions include:
- Pick-and-Place Automation: Add a small gripper or an electromagnet to create a high-speed pick-and-place robot.
- Drawing Robot: Attach a pen or a marker to the end-effector and program the robot to draw complex 2D shapes and patterns.
- Visual Feedback Integration: Add a small camera and use OpenCV on a computer to allow the robot to track and sort objects based on color or shape.
- Web Interface Control: Create a web-based dashboard to control the robot's movements remotely over a local WiFi network.
This project is a perfect combination of Mechanical Engineering, Mathematics, and Control Systems.
That's how we made this robot.