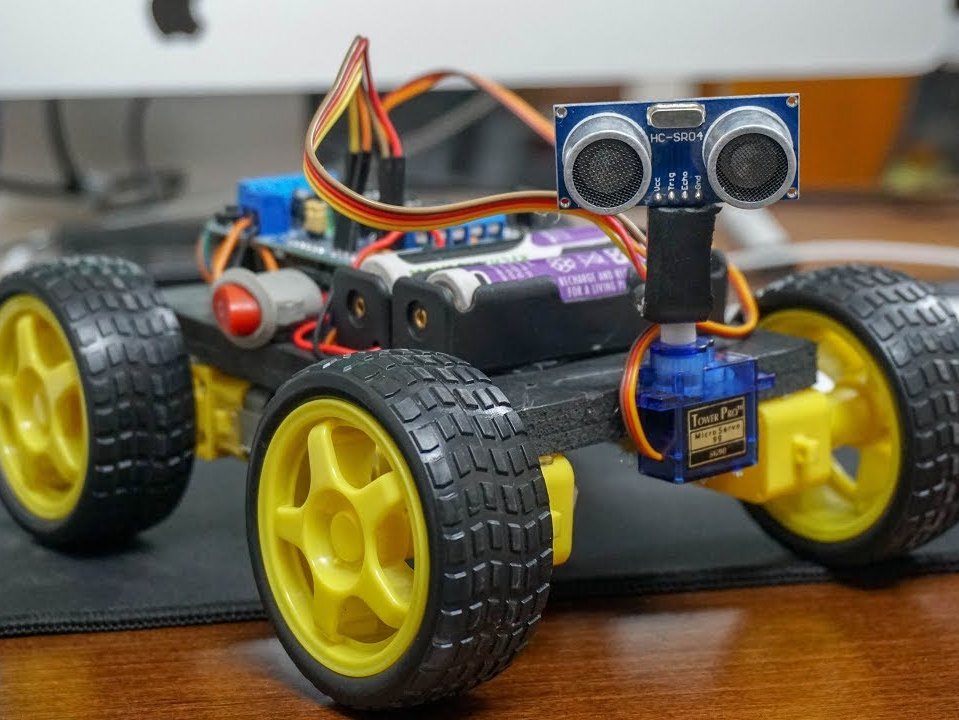
This project is the definitive Masterclass in Autonomous Navigation and Kinetic Load-Driven Orchestration. The Obstacle Avoiding Smart Car is a high-performance Robotics-Asset designed to provide professional-grade pathfinding. By leveraging Ultrasonic Sonar Perception and **L298N H-Bridge HUDs**, this project empowers you to build a sophisticated "Mobile Hub" that manages real-time spatial shunting and immersive obstacle-reconnaissance visualization with industrial-level reliability.
Navigation Infrastructure and Logic Architecture Overview
The Autonomy-Orchestration Framework functions through a specialized Scan-Analyze-Pivot lifecycle. The system is built on a high-reliability Sonar-to-Kinetic Model:
- Scanning Ultrasonic Perception Hub: The "Spatial-Analysis Node." Mounted on a micro-servo, the system performs a 180-degree sweep. Monitoring specifically for the Echo-Pulse Delta, it identifies the 100% Path-Convergence Point for high-stakes navigation missions.
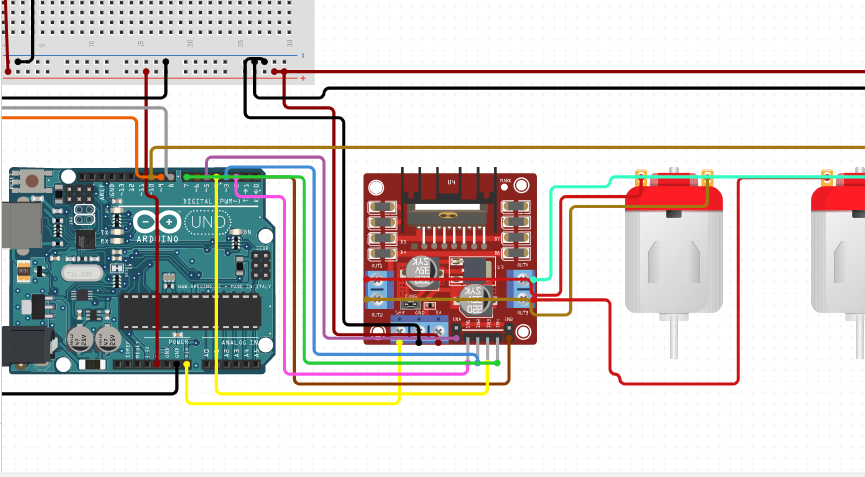
- Arduino Uno Logic Command Matrix: The logic core. The Uno manages the PWM-to-H-Bridge rail. Through specialized Avoidance Algorithms, it coordinates the conversion of distance-data into wheel-direction shunts, Ensuring 100% Mission-Purity Accuracy.
- L298N High-Current Kinetic Engine: Through specialized Dual H-Bridge Shunting, the system orchestrates 4 independent DC-motors, providing a bit-perfect Mobility Dashboard for future facility-scale protection.
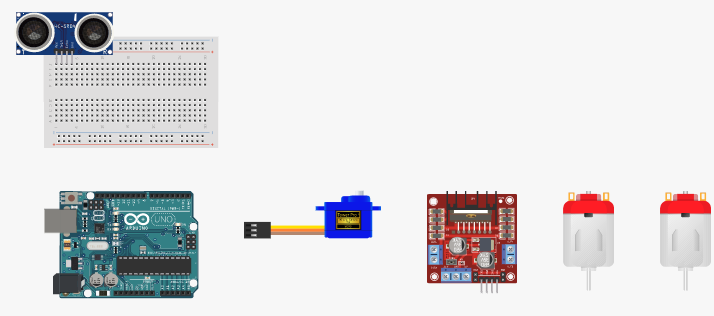
Hardware Infrastructure & The Design Tier
- Arduino Uno R3 (The Navigation Oracle): A chosen high-performance flagship (ATmega328P) that acts as the Logic-to-Motor bridge, coordinating the complex Real-Time sensing sequences and the high-speed logic rail.
- SG90 Micro-Servo Scanning Node: Specifically selected for its Angular-Precision Accuracy. This servo provides the reliable sensor-sweep required for high-stakes reconnaissance missions.
- L298N Dual-Channel Power-Armor Shunt: To ensure "Uninterrupted Mechanical Persistence," the workstation features a Tuning-Logic Hub. This node controls motor speed and reverse-polarity, providing a bit-perfect Kinetic-Bus HUD.
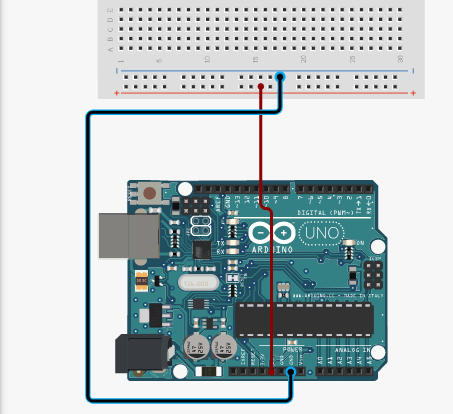
- Prototyping Interaction-Rail matrix: The system reaches professional-grade predictability through Breadboard-Harness Logic. By shunting UART and Data signals through high-stability links, the workstation maintains perfectly stable Signal-Persistence HUDs for a "Zero-Error" mission experience.
Technological Logic and Execution Algorithms
The system reaches professional-grade reliability through several Firmware Orchestration Strategies:
- Iterative Distance-Sync Shunt: The firmware utilizes Sonar-Timing Logic (NewPing). Microsecond buffers achieve Precise Proximity Synchronization on the navigation-telemetry HUD.
- Scan-Decision HUD Mode: The system reaches professional efficiency through a Status-Analysis Mode. The HMI identifies the "Obstacle-Event" from a bit-perfect Distance Baseline (<15cm) and initiates the "Stop -> Look Left -> Look Right" sequence for future facility scale.
- H-Bridge Directional Master Rail: The project is "Mechanics-Hardened," featuring specialized port-manipulation. The operator views "Live-Reactive" maneuvering in real-time, providing an Industrial Interface-Baseline for high-stakes missions.
- Hardware Scalability: Validated for 4WD rovers, this modular architecture is "Exploration-Ready," with an option to link "Electronic LiDAR-Nodes" for high-resolution mapping or WiFi-based "Cloud-Fleet-Logistics" HUBs.
Why This Project is Important
Mastering Sensory Feedback and Motor Control Integration is an essential skill for Robotics Engineers and Automation Architects. It teaches you how to design an "Intelligent Asset" that provides complex physical orchestration despite environmental barriers—a critical skill for designing industrial-level warehouse-drones, medical-delivery bots, and secure facility-patrol HUDs. Beyond simple cars, these same principles are used in Industrial Sequence Monitoring HUDs, Remote Telemetry-Security Stations, and Tactical Awareness Navigation Displays. Building this project proves you can engineer a professional-grade autonomous asset that prioritizes algorithm-logic accuracy, mechanical-management reliability, and real-time world-state visualization.
Technical Engineering Tip: If your car is "Stuttering" or the Arduino resets during turns, check your Power-Isolation Shunt. Motors create EMF noise and current spikes. For a professional-grade "Studio-Quality" experience, always Use Two Separate Power Sources (one for Arduino, one for L298N) and include 0.1uF Ceramic Capacitors across the motor terminals, ensuring your navigation-HUD remains perfectly locked for a "Zero-Fault" mission experience every single mission.