Introduction
This robot arm uses servo motors to move. At the end of it there is a marker. At first-you can turn potentiometer to move the arm. When it is in the position you want-press button and Arduino on serial monitor prints the positions of servos. Then run another sketch and put the values in it. Arm now moves it self on positions you want. Project is made using Arduino Mega 2560.
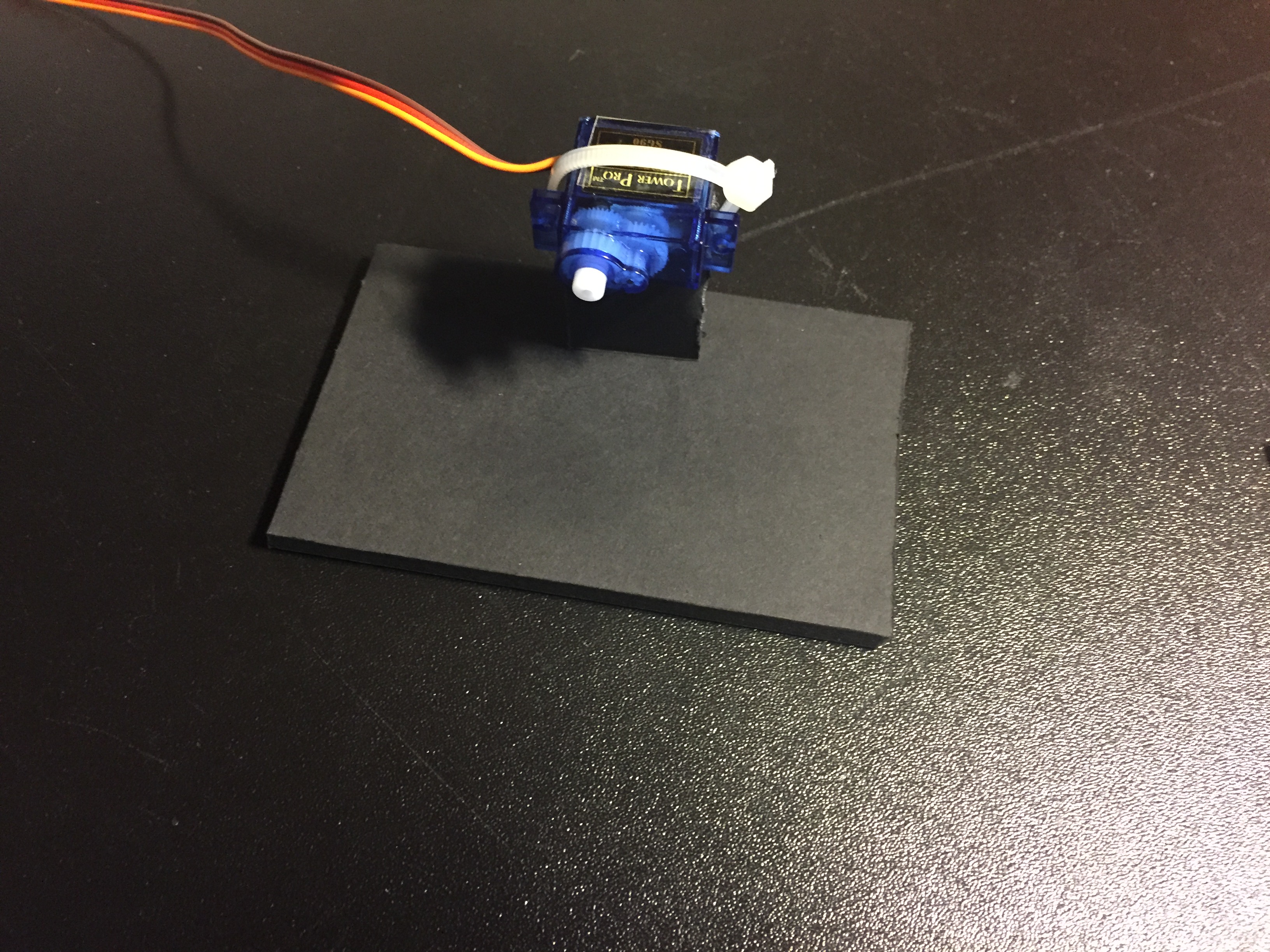
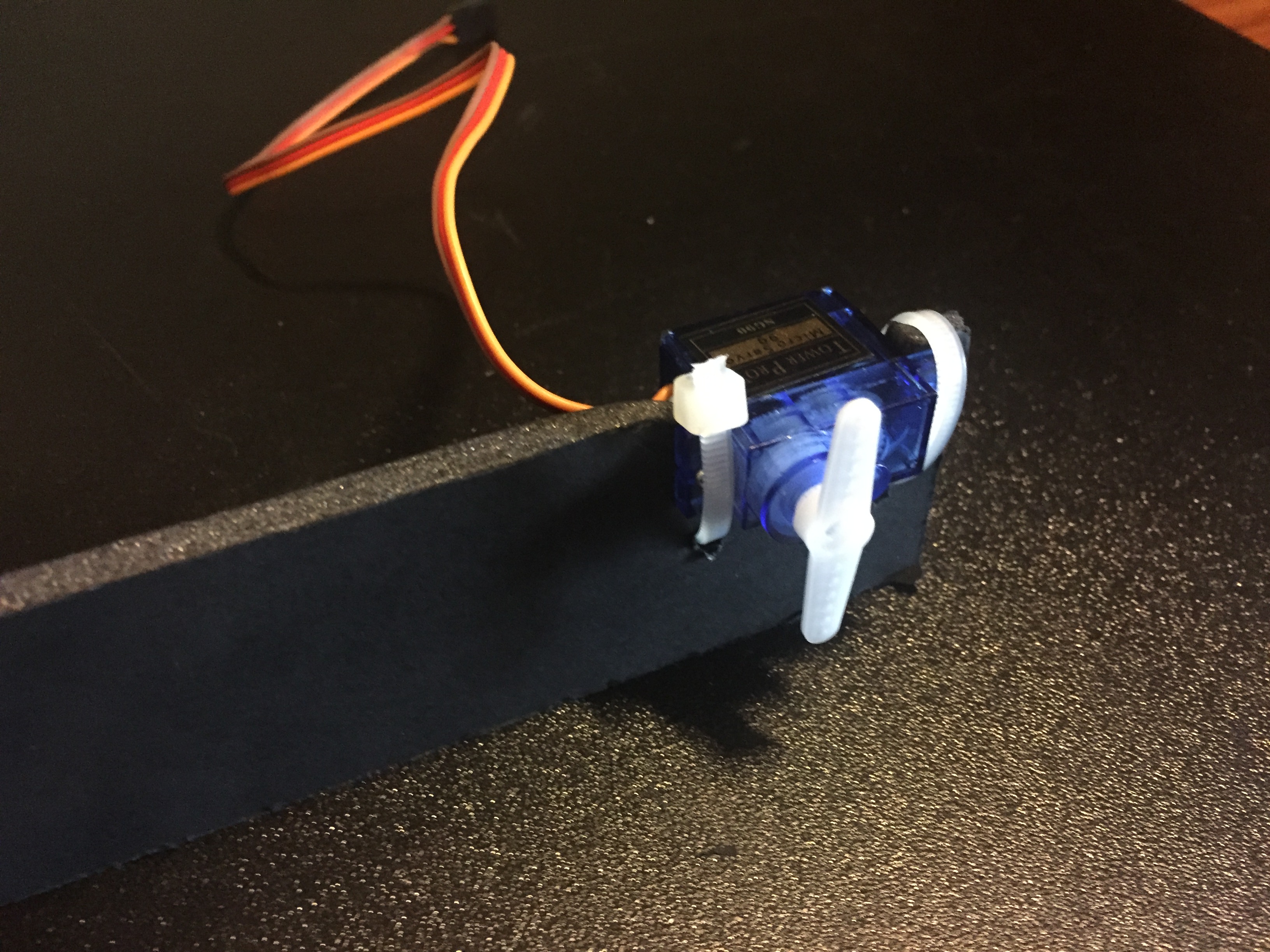
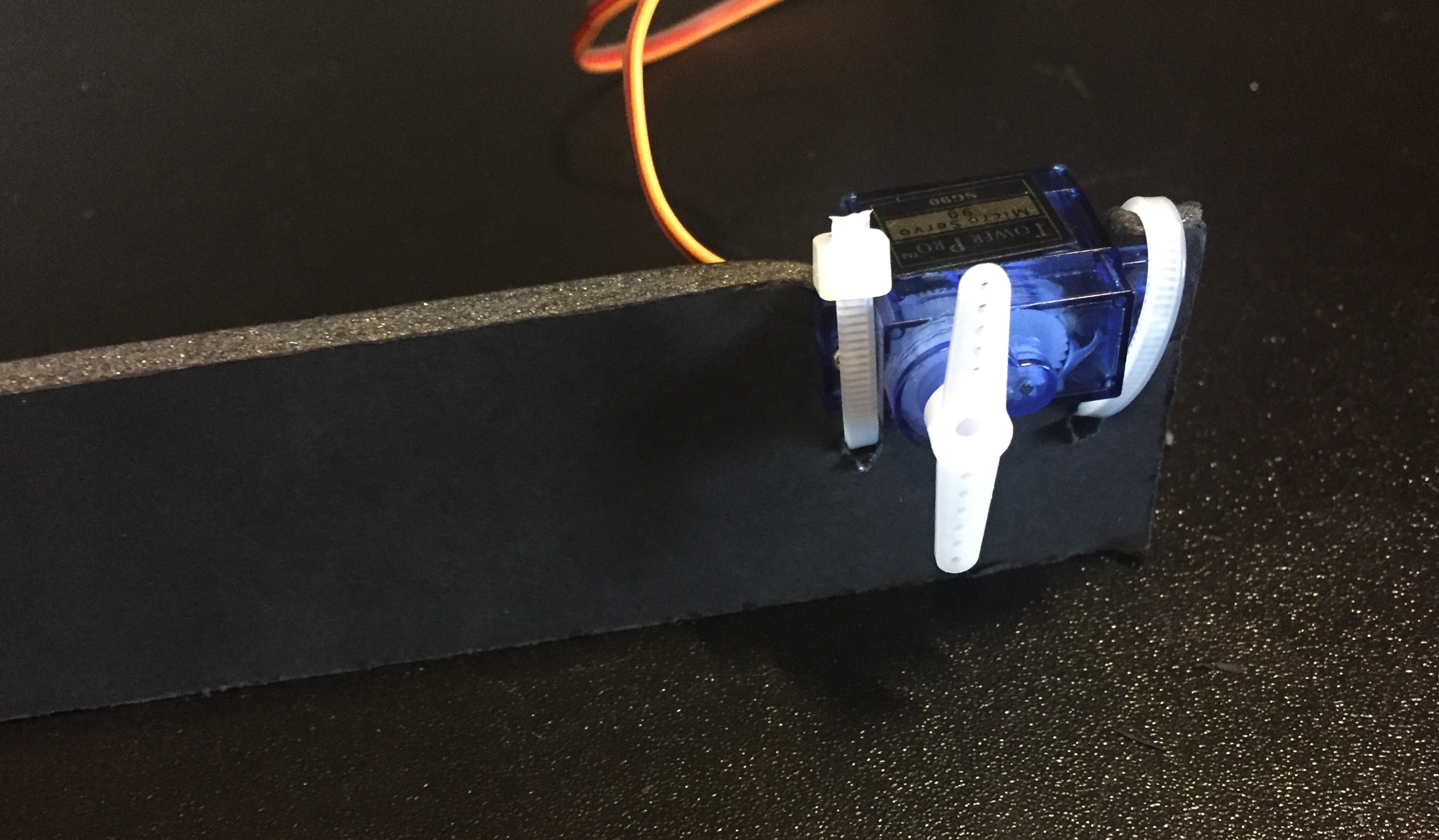
Base
Servo placed on base using duck tape and zip tie
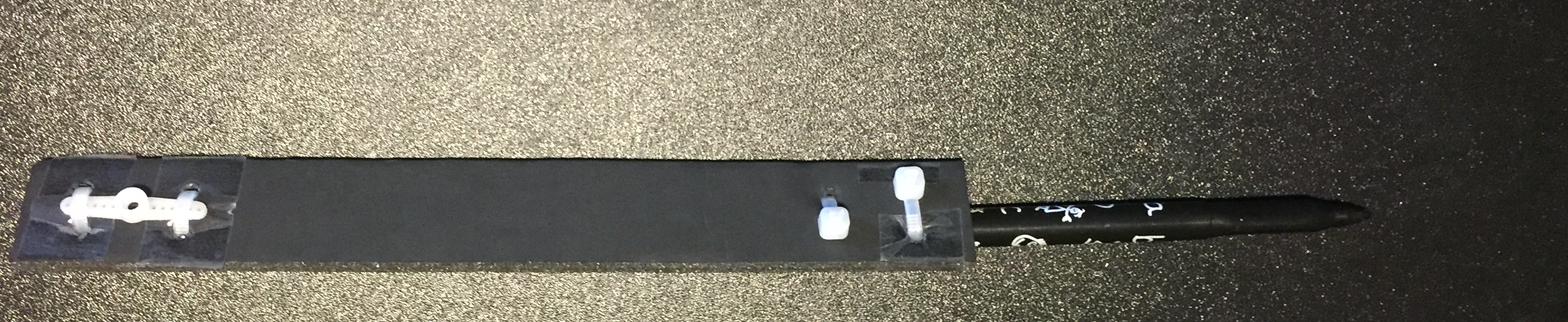
First arm segment
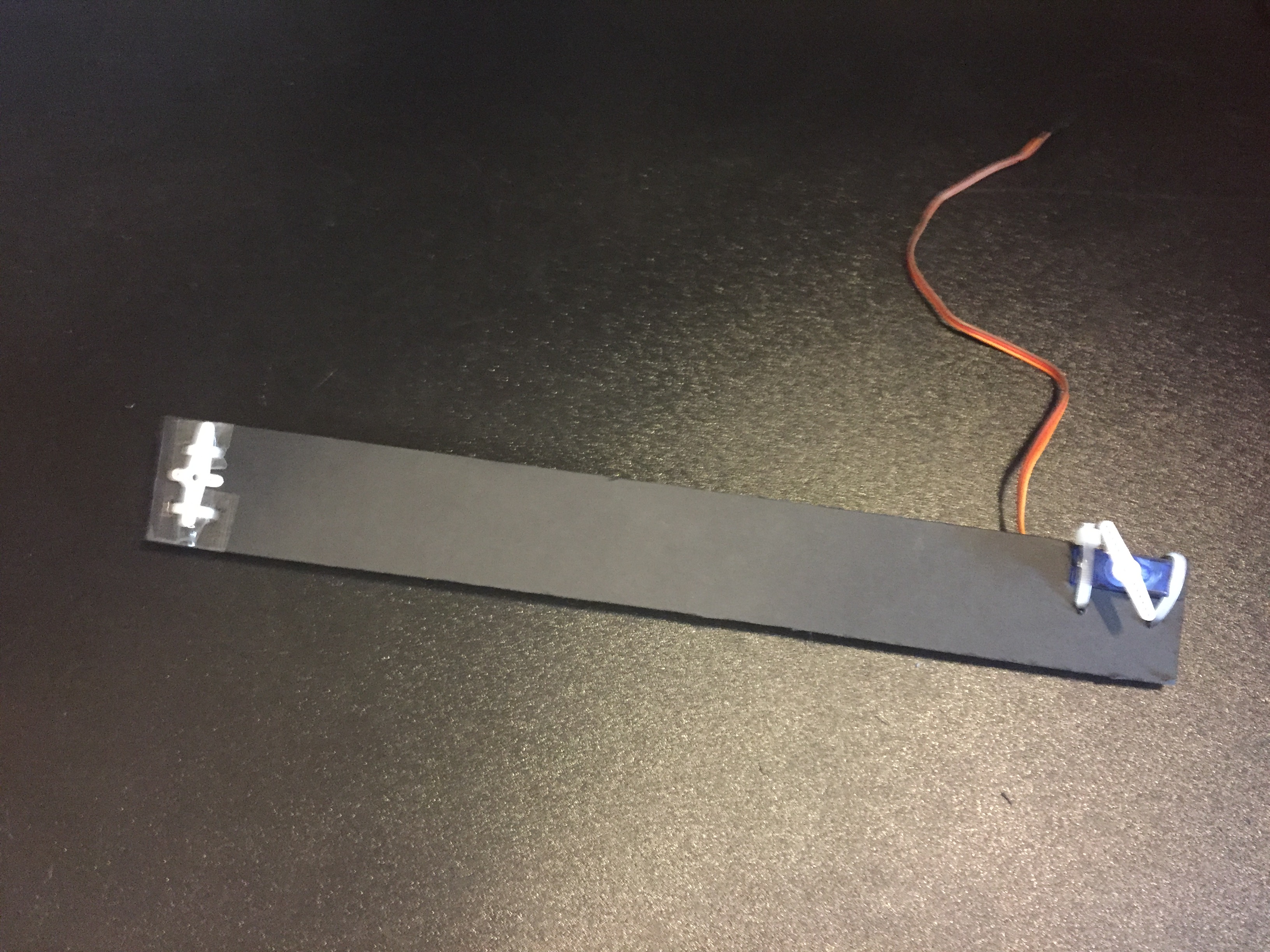
Second arm segment
This is shorter because now I started to worry about the servo motor lifting power.
Run the calibrating code to get servo values and then put them in the moving code.
EXPANDED TECHNICAL DETAILS
Precise 2D Cartesian Plotting
The Drawing Robot (often a pen-plotter or "Polargraph") uses algorithmic motion to translate digital images into physical art.
- Bipolar Stepper Drive: Managed by two A4988 stepper drivers and an Arduino Uno. The firmware handles "Microstepping" (1/16th steps) to achieve 0.01mm precision on a vertical or horizontal surface.
- G-Code Parsing: (Advanced version) The Arduino listens for standard CNC G-code strings via Serial. It calculates the necessary rotational steps for each motor to move the pen in a perfect straight line or curve.
Creative Interface
- Pen-Lift Actuation: Uses a small micro servo to raise and lower the drawing pen, allowing for complex, multi-layered vector drawings.