My Project Videos
Check out how I made this rig here:
See the build process of the project (0:00) and the camera rig working for the first time (5.50).
Check out my first test outside with the rig here:
Check out the rig being used without a user subject in the centre:
Check out the rig being used with bubbles!
Please Subscribe to my YouTube channel to watch all my latest videos including experimentations with the camera rig!
How I made it
This was my first ever Arduino and physical computing project as part of my BSc Product Design course at Middlesex University London. The brief given was:
"To develop a new user experience for smartphone camera users. The system should enable users to shoot amazing video that has either not previously been possible or that can only be done with expensive professional systems"

I wanted to focus on the Bullet time effect the visual technique made famous by the Matrix films and more recently used in BBC's Sherlock.

As part of my project I was required to use Arduino & related physical computing resources that I had available to me.
I looked at several ways of achieving the desired effect, the original idea was to have a device which could hang from a suspended pivot point (e.g. a ceiling or tree) and then spin around the user standing below. However, it was quickly identified that this could pose a risk to the user and also limit the areas where it could be used.
I then looked at potential tech which I could implement in order to get the high speed required to shoot the bullet time effect as well as other 360º surround video.
Project Overview & Technical Deep-Dive
"Drone-Cycle" is a professional-grade cinematic tool designed to democratize the "Bullet-Time" effect. This project re-engineers a heavy-duty office chair base into a high-stability central pivot, driven by a 1000KV Brushless Outrunner. By integrating a wireless XBee telemetry bridge, the rig allows for remote operator control, enabling high-acceleration spins that capture seamless 360º footage around a central subject.
- Brushless Propulsion & ESC Forensics:
- The A2212 Outrunner: Unlike brushed motors, the A2212 utilizes electronic commutation. The Arduino dispatches a 50Hz PWM signal (ranging from 1000µs to 2000µs pulses) to a 30A ESC, which then synthesizes a 3-phase AC signal to drive the motor.
- Thrust-to-Torque Conversion: The motor is equipped with a drone propeller. Rather than lift, this propeller generates horizontal thrust, creating the rotational momentum required to overcome the static friction of the bearing hub and swing the camera boom at high velocities.
- Wireless Command Gate (XBee Series 2):
- Zigbee Mesh Topology: The system features two Arduino nodes. The "Remote Node" captures potentiometer values and transmits them over a 2.4GHz IEEE 802.15.4 link. The "Rig Node" receives these data frames in real-time, adjusting the ESC throttle.
- Noise Immunity: By using XBee Series 2, the rig maintains a robust connection even in environments with heavy Wi-Fi interference, ensuring the operator can safely "Kill" the motor if the user loses balance.
- Mechanical Kinematics & Precision Engineering:
- Central Pivot Hub: To ensure the user remains steady at the center of the rotation, the rig utilizes a cast-metal chair base. A lathe-turned sleeve containing two Needle Roller Pin Bearings allows the extension arm to rotate with minimal friction and zero radial play.
- Moment of Inertia Optimization: The electronics and battery are mounted close to the central pivot to decrease the 'Swing Weight,' while the smartphone is positioned at the end of the monopod boom to maximize the rotational radius and provide a wider perspective.
Initial Prototype
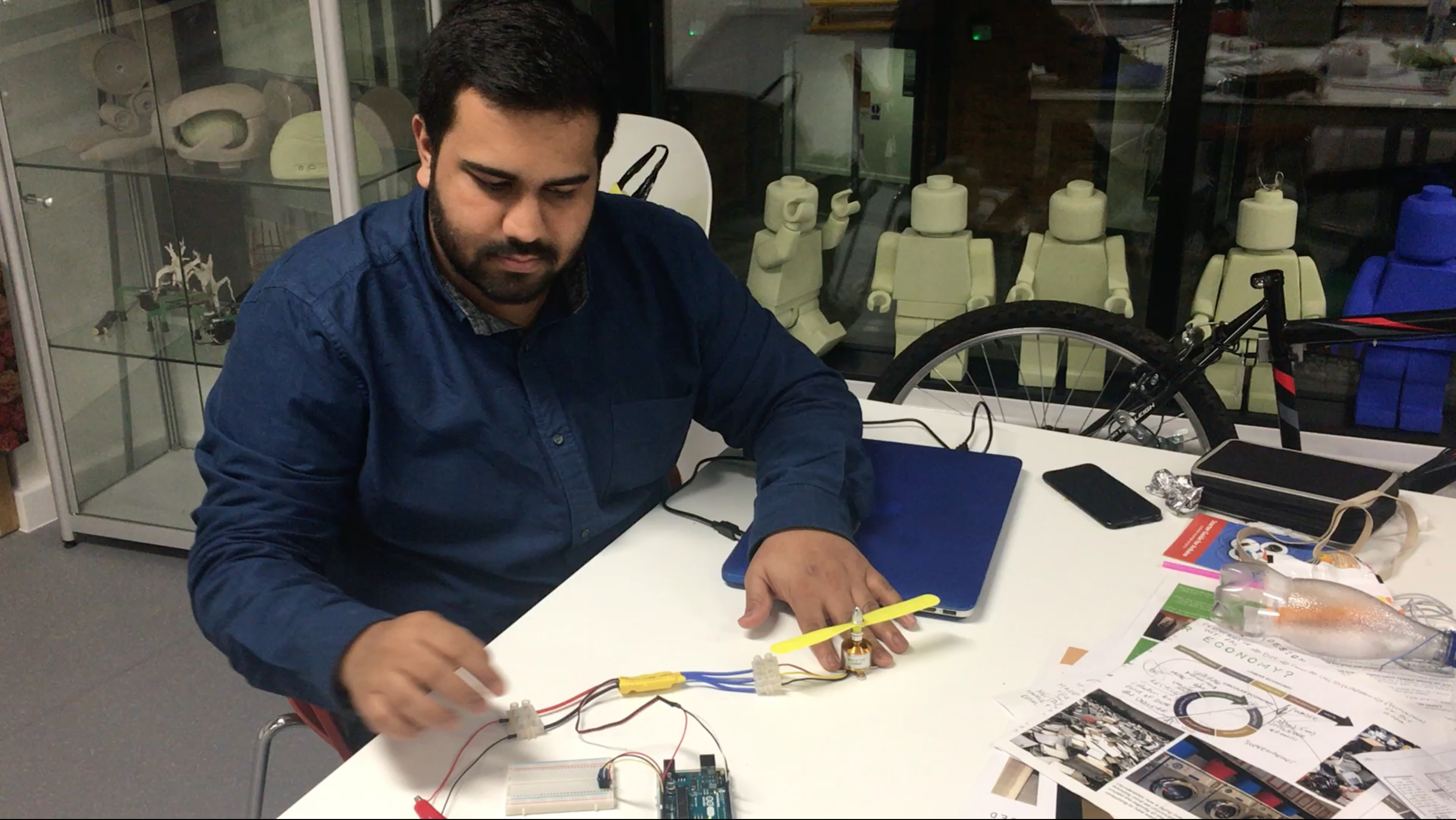
I tested out the Arduino & drone motor setup using a simple Fade code from the Arduino example basic sketches.
I then looked to make a device that wouldn't require an specific environment in order to work and came up with the idea of a pivot point which the user would stand on and have the camera swing around below their feet.
Wanting to prove my concept worked, I made an initial prototype using materials readily available to me which included scrap ply & metal, an old bicycle wheel and a plastic platform. I then roughly attached the Arduino and all the other tech including the motor with a soft propeller.

This prototype proved that I could achieve the desired effect as you can see in the first part of my YouTube video below however it wasn't as stable for the user because of the narrow bicycle pivot point. I then went to a scrapyard to look for wheels with bigger hubs and bearings.

Final Prototype & Engineering Implementation
I found this discarded office chair and had hoped to apply the bicycle wheel and its bearing system from the prototype to the mechanism and base from this chair - as it was ideal to overcome the stability issues that I had had with the initial prototype but they proved to be unsuitable for working with together in order to get the compact finish I wanted.

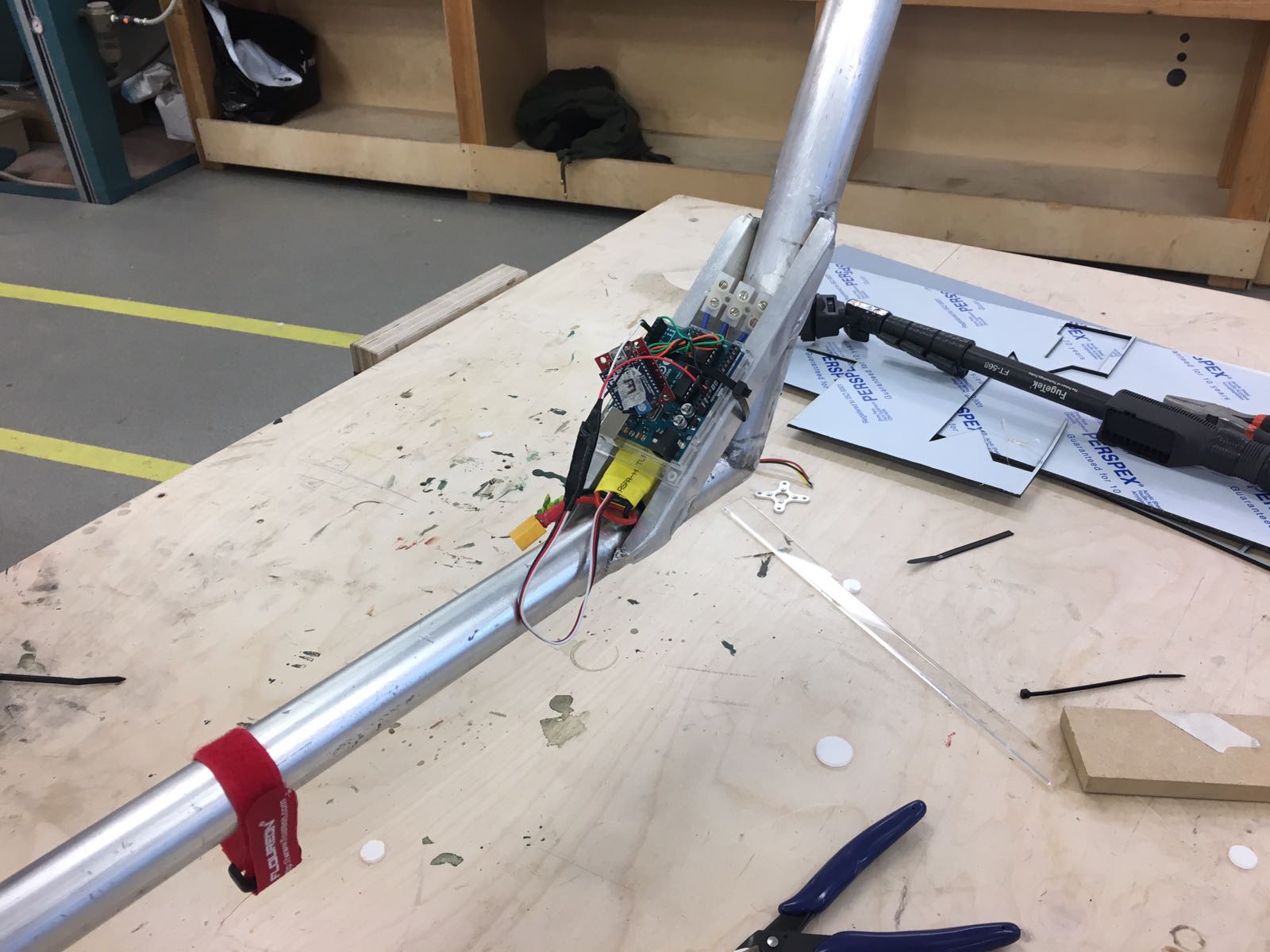
However, I realised that I could still use the strong and stable base from the chair and make a custom fit bearing to go around the stem of the base and swing around with the user standing where the person would have sat on the chair.

I made the custom fit bearing and fitted it to the metal base. I had an extension arm fitted where I attached and mounted the Arduino, motor (onto water jet cut bracket) & battery with the Monopod (selfie stick) into the top part of the arm.

- High-Current Power Management:
- The system is powered by a 3S LiPo battery (11.1V). During peak acceleration, the brushless motor can draw over 15A. Large-gauge XT60 connectors and heavy-duty wiring are utilized to prevent voltage sags that could reset the Arduino or cause the XBee link to drop.
- Safety & Balance Control:
- The weight of the smartphone and monopod creates a massive cantilever force on the central shaft. The use of a TIG-welded metal arm ensures the structure can withstand the centripetal forces generated at high RPMs without catastrophic mechanical failure.
I used Digi's Xbee Series 2 Wireless connectivity to allow the operator to have full control of the speed and the status of the rig when the user was within it. I needed to have a second Arduino to communicate with the one on the arm that controlled the speed and on/off status which became a remote control.
- Operator Interface (HMI):
- The custom-built remote control includes a laser-cut enclosure and an integrated XBee explorer. This provides the operator with a high-fidelity "Throttle" to smoothly ramp up the motor speed, preventing sudden "Jerks" that could dislodge the camera or subject.



Conclusion
Drone-Cycle demonstrates the potential of cross-disciplinary engineering. By combining UAV propulsion tech with heavy mechanical pivots and wireless mesh networking, it provides an accessible, high-performance solution for advanced cinematic storytelling.
Kinetic Cinematography: Capturing time through brushless rotation.
ICYMI:
Watch the final result footage from the Camera rig in the series of videos that I have made for my YouTube Channel:
Check out the rig being used with bubbles!
Thanks for reading about and watching my first ever Arduino project!
For updates on my work, please follow me on:
- Facebook: facebook.com/KFERNANDESIGN/
- Instagram: instagram.com/kfernandesign/
- Twitter: twitter.com/KFernandesign
- YouTube: https://www.youtube.com/channel/UCkpCuAyZJCuQiNOgwTUiwzg