Temporal Pneunomatics: Automated Pet Feeder
The Easy-to-Build Pet Feeder transforms theoretical Arduino logic directly into a physical machine capable of sustaining biology! This fundamental hardware orchestration project links rigorous temporal UNIX timestamps directly into physical spatial displacement arrays. It forces a strong C++ state-machine to evaluate exactly when a specific hour triggers, violently driving a robust Servo Motor to mechanically open a chute, spilling exactly 60 seconds of food into a domestic environment.
The DS3231 Exact Alarm Matrix
You cannot use delay(86400000) (24 hours). If the power flickers for literally 1 second, the Arduino reboots, the timer resets completely to zero, and the cat physically starves to death.
- The incredibly critical foundation is the DS3231 Real Time Clock Engine utilizing I2C (
A4 / A5). - The RTC keeps perfect time using its onboard CR2032 battery even if the Uno loses 5V USB power.
- The State Evaluation Loop:
DateTime now = rtc.now(); // Query the massive physical hardware chip constantly!
// Did the exact second hit 8:00 AM? AND has the cycle not already fired once today?
if (now.hour() == 8 && now.minute() == 0 && now.second() == 0 && !fedToday) {
executeFoodDrop(); // Violently spin the servo chute!
fedToday = true; // Lock out the system so it doesn't feed constantly!
}
// Reset the trap string directly at Midnight to prepare for tomorrow!
if (now.hour() == 0 && now.minute() == 0 && now.second() == 0) {
fedToday = false;
}
Creating Complex Dispensing Sweeps (SG90)
If the Servo just rotates to 90 Degrees and holds, the dry cat food physically jams in the PVC tube like a rock.
- The
executeFoodDrop()logic function MUST execute an aggressive sweeping sequence to agitate the blockage! - The Uno utilizes
forloops explicitly moving from0to180and back ten times forcefully! for (pos = 0; pos <= 180; pos += 5) { foodServo.write(pos); delay(15); }- This constant, violent mechanical jiggling shatters the biological kibble structure, forcing exactly consistent physical volume into the bowl bowl exactly until the Uno finally forces the hatch physically closed exactly at
pos = 0.
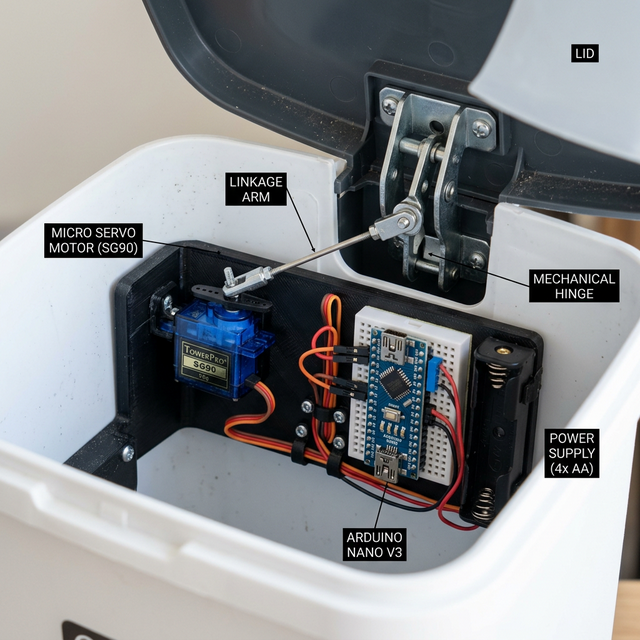
Feeder Hardware Mechanics
- Arduino Uno/Nano (Standard execution speeds are perfectly sufficient).
- DS3231 I2C RTC Module (Cannot be built without this specific, battery-backed module; software timers are universally unreliable).
- SG90 or heavy MG996R Servo Motor (An SG90 can rotate a small plastic flap, but an MG996R Metal Gear servo can physically rotate an entire PVC pipe assembly filled with 5 lbs of heavy dry food without melting!).
- Cardboard or PVC Infrastructure (Often integrated into water-bottle funnels or a 3-inch PVC T-junction!).