This project plays the song "What Does the Fox Say" by Ylvis. https://www.youtube.com/watch?v=jofNR_WkoCE&list=RDjofNR_WkoCE&start_radio=1 .
It plays this song on a piezo buzzer and also wags the foxs tail at the same time. You can see a demo here:
This is a very simple project, especially if you have used arduino before.
You first print the Fox Bot Base file and the Fox Bot Tail File. You then attach the servo and arduino to the base and attach the tail to the servo horn. I used hot glue for this.
Then you upload the code to the arduino using the Arduino IDE. If you have never done this before, find some documentation. I'm using a library called buzzer.h which you may need to install.
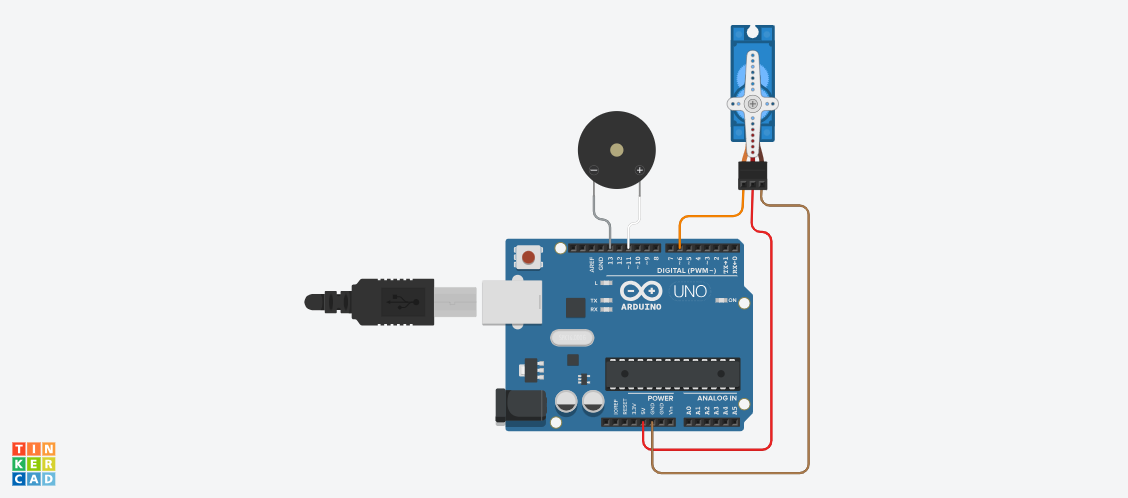
Finally you wire the components to the arduino. As long as you are using a 9g servo, the red wire goes to 5v, the black wire goes to GND and the the orange wire goes to digital pin 6. One side of the piezo buzzer goes to digital pin 11, the other side goes to digital pin 13. I stuck the piezo buzzer directly on the arduino as you can see in the demo video. Most piezo buzzers are not sensative to + or - even though they have one written.
You can see the TinkerCAD file in the link below if you want to edit anything.
https://www.tinkercad.com/things/iIbzoGm5Iwq
You can also see how I created the array of notes you see in the code. I used google sheets and the sheet music found here:
https://musescore.com/user/1320626/scores/6686202
https://docs.google.com/spreadsheets/d/1Hj5AEMUKdZPH4zJ71bwgdxuM_eDKzBiqrZQkhEObgv4/edit?usp=sharing
EXPANDED TECHNICAL DETAILS
Autonomous Scouting Robotics
Fox Bot is a rugged, 4-wheeled autonomous vehicle designed for scouting and obstacle avoidance in varied indoor environments.
- Reactive Navigation Sweep: Features a "Head-Mounted" ultrasonic sensor on a micro servo. The Arduino performs a 180-degree scan every time an obstacle is detected, calculating the "Path of Least Resistance" before steering.
- Dual-Bridge Drive Train: Controlled via an L298N motor driver. The firmware manages differential steering, allowing for zero-radius turns in tight spaces.
Mission Logic
- Stealth and Speed Modes: Includes software modes to adjust motor speed for "Quiet" scouting or "High-Speed" transport, providing a versatile platform for educational robotics.