This project uses Raspberry Pi-3/4 or Aaeon Up x86 single board computers (SBCs) to detect hand written digits from live video captured by the USB camera and send the recognized digit to Arduino Uno to display on a 7 segment display. For this purpose, we use CASP software to program the SBC and Arduino Uno with respective logics.
This project demonstrates how to integrate Arduino boards with SBCs to do some really useful tasks. It also demonstrates the capabilities of CASP to model and program individual targets to achieve a common objective.
Project Overview
"Digit-Neural" is a rigorous implementation of Edge-AI Inference Forensics and Multi-Target Logic Orchestration. By utilizing a Raspberry Pi as a high-performance inference node and an Arduino Uno as a deterministic peripheral controller, this project bridges the gap between complex computer-vision heuristics and embedded hardware. The system features a 2-layer Feed-Forward Neural Network (FFNN) trained on the MNIST dataset, capable of recognizing handwritten digits from a live optical stream. The build emphasizes seamless serial-telemetry diagnostics using the CASP modeling environment for cross-platform execution.
Basic Logic & Technical Deep-Dive
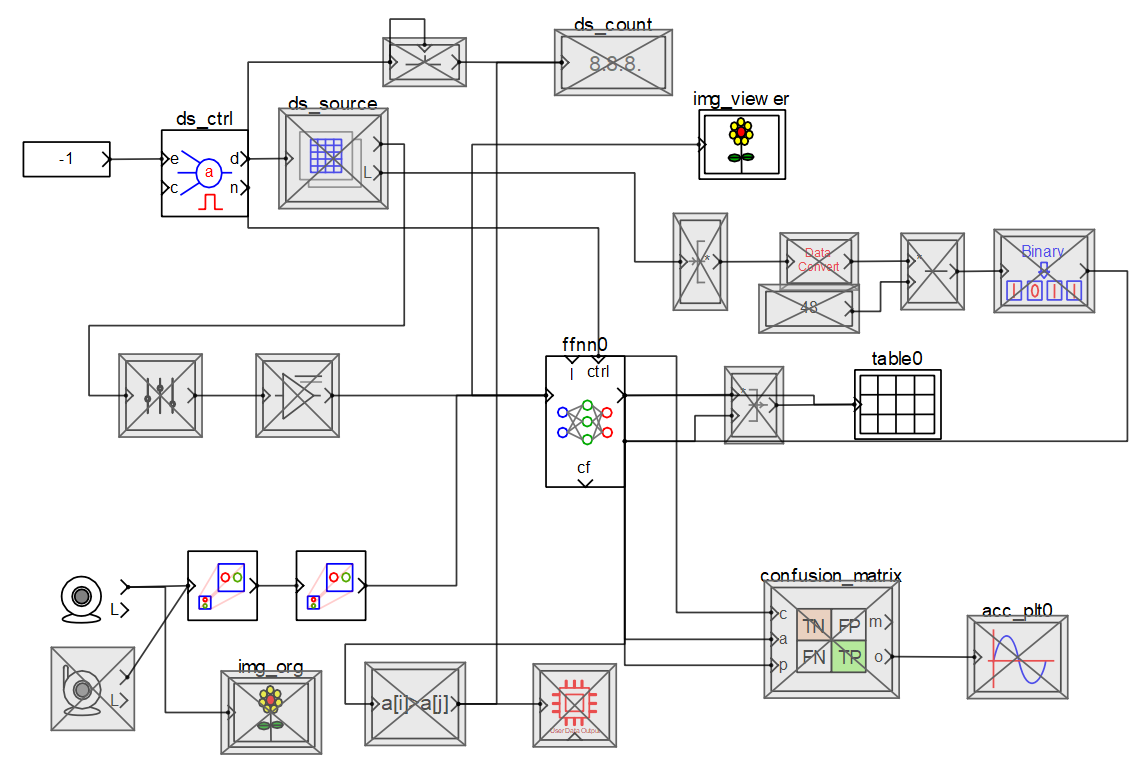
Step 1: Neural Network Training & Inference On the host PC (native target), we develop a simple 2-layer, 128 neurons per layer feed forward neural network model and train the model with the MNIST number data set. We save the model during the training process.
- The FFNN-Architecture Diagnostics: The system employs a neural network with two hidden layers $(128\text{ neurons each})$. Forensics during the training phase involve optimizing the weight-harmonics and bias-vectors using the MNIST dataset. The diagnostics focus on achieving high classification precision $(>98%)$ on the host PC before exporting the lightweight inference-engine to the ARM-based Raspberry Pi.
- Optical Pre-processing Heuristics: Raw video frames from the webcam undergo rigorous image-processing forensics. This includes grayscaling, Gaussian blur $(\sigma)$ for noise reduction, and deterministic rescaling to $28\times28$ pixels to match the MNIST input-layer harmonics.
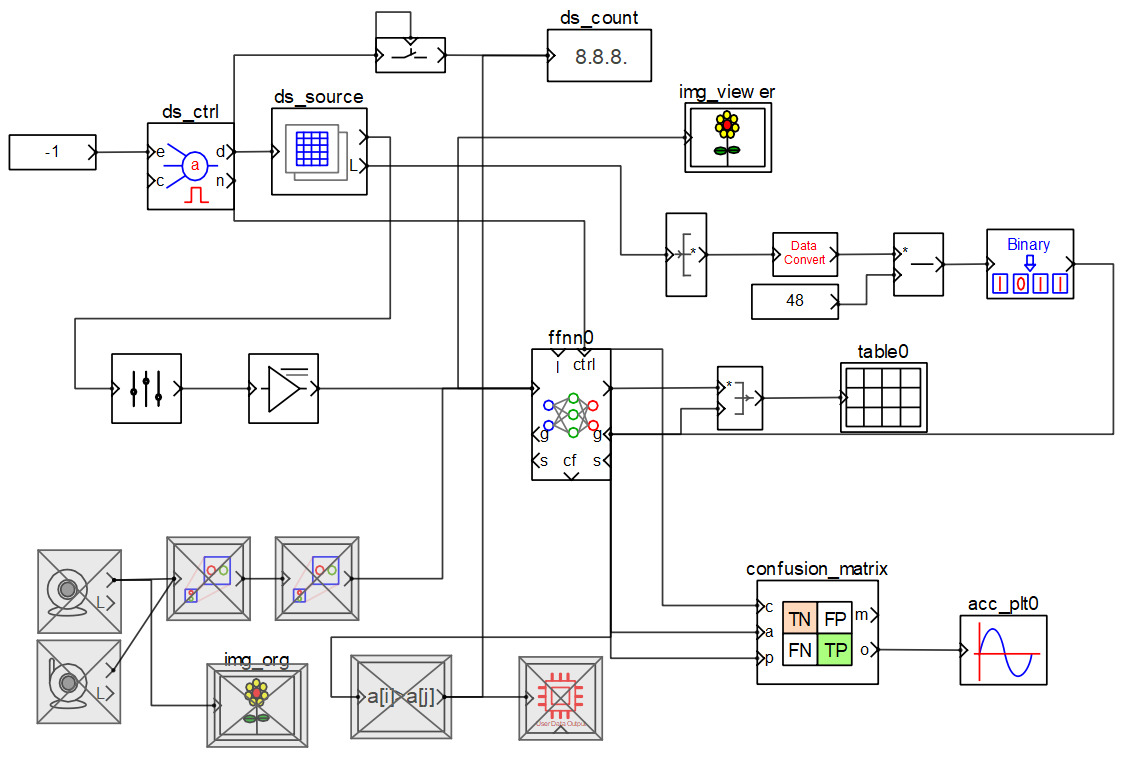
We then test the trained model with live images from a USB camera connected to the native PC.
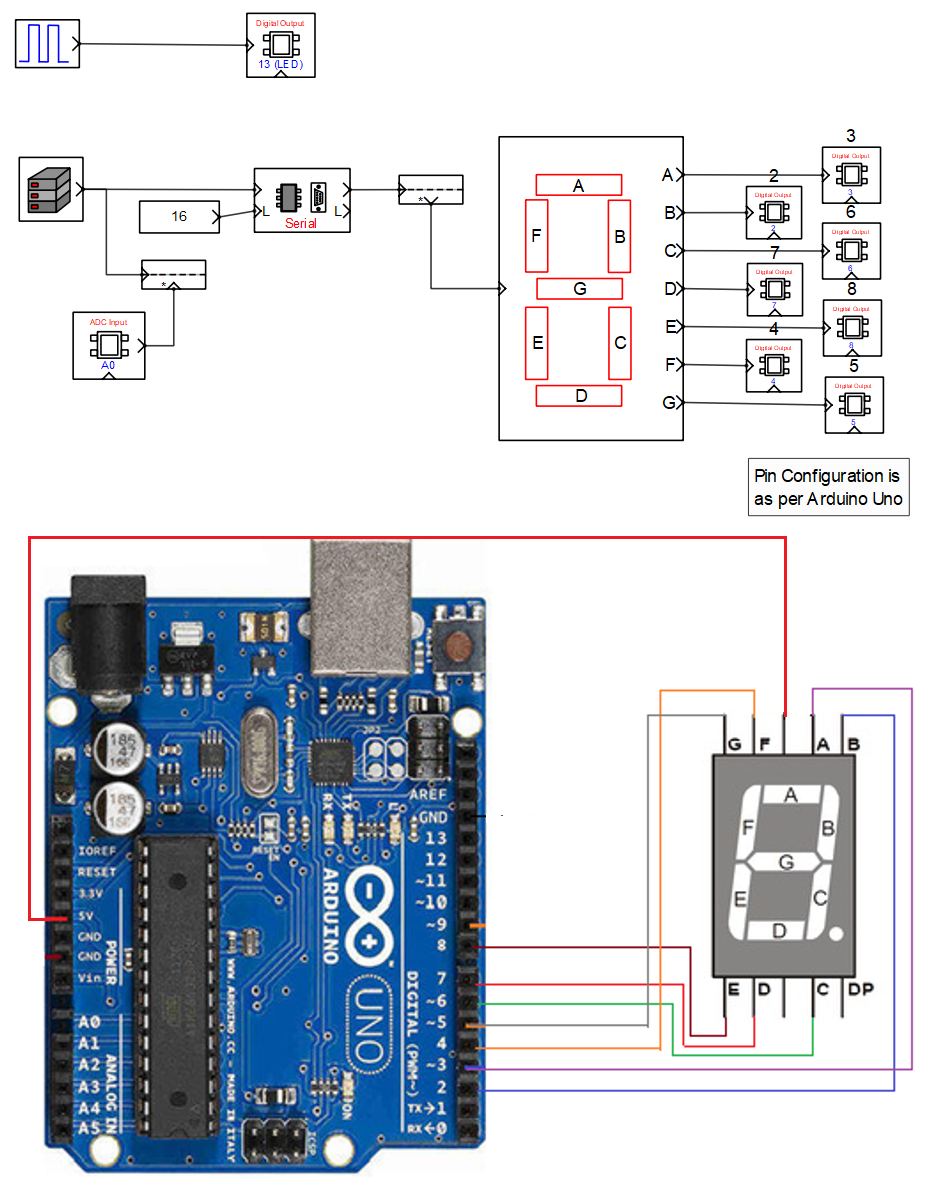
Step 2: Arduino Display Logic On the Arduino Uno target, we develop logic to receive a number from the PC via serial communication and display it on a 7-segment display.
- The Cross-Platform Logic Bridge: Once a digit is recognized by the Raspberry Pi $(\text{e.g., predicted label = "5"})$, the inference result is dispatched over a $115,200\text{bps}$ serial link. The diagnostics involve a high-speed logic-bridge on the Arduino Uno, which decodes the incoming byte-stream and triggers the corresponding 7-segment bitmask.
- CASP Multi-Target Orchestration: Unlike traditional fragmented coding, the project uses CASP to model both the SBC-inference and AVR-display logic in a single synchronized environment. This forensics ensures that the "Optical-to-Visual" latency is minimized through optimized machine-code generation for both architectures.
Step 3: Complete System Test We then test the complete logic on the native PC. That is, when a digit is recognized in the live video from the USB camera, the corresponding digit shall be displayed on the 7-segment display.
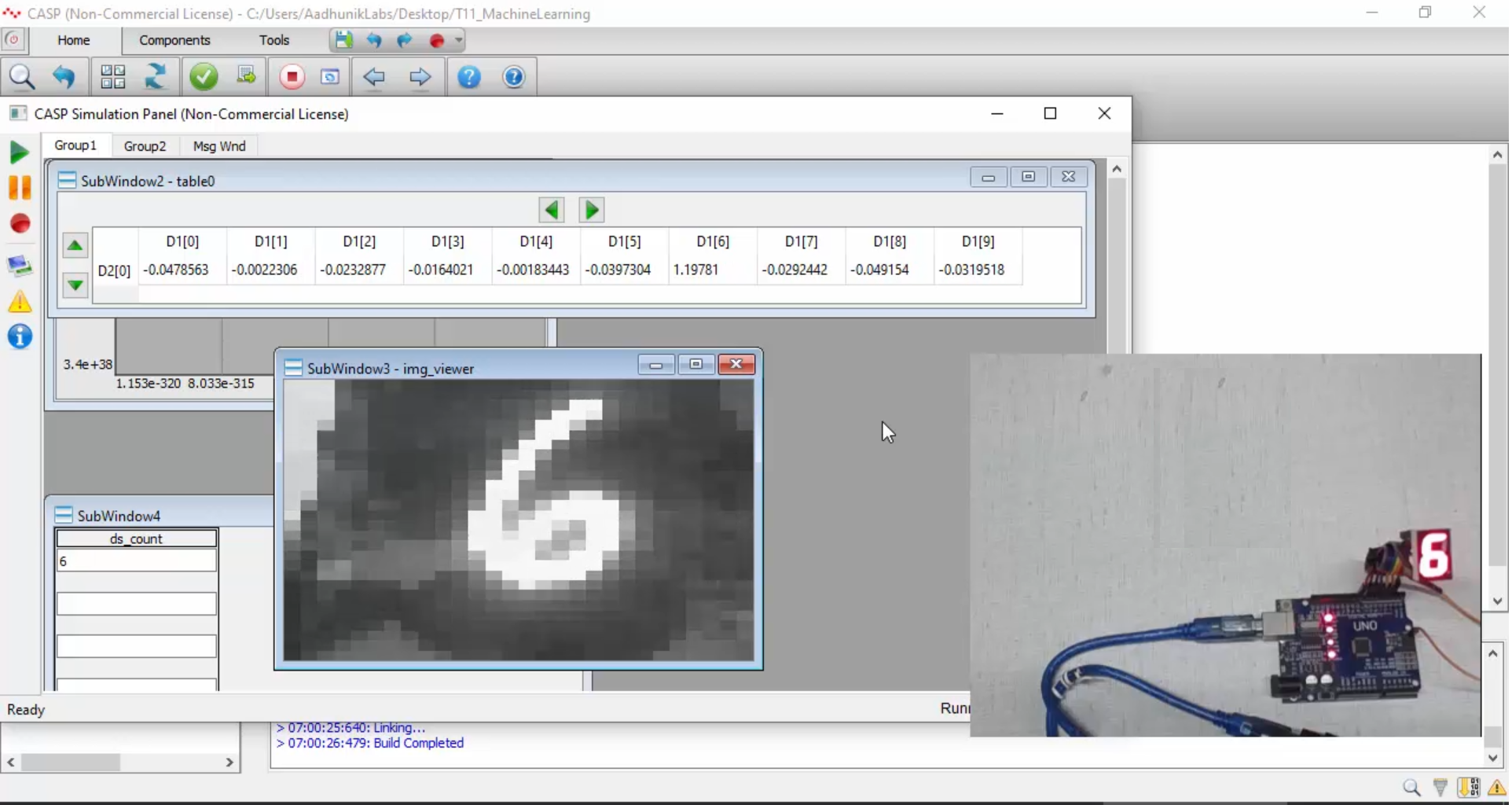
Step 4: Deployment to Target SBC We now transfer the model from Step-1 to the target SBC and connect the USB camera and Arduino Uno to the SBC. We run the model on the target SBC to recognize handwritten digits and display them on the 7-segment display.
Engineering & Implementation
- HMI Visual Feedback Diagnostics:
- 7-Segment Multiplexing Forensics: The Arduino logic manages the photonic output of the 7-segment display. Forensics into the pin-mapping $(A-G)$ ensure that the recognized digit is presented with absolute visual clarity.
- Live Inference-Confidence Harmonies: The Raspberry Pi inference engine can be configured to output classification confidence scores. Diagnostics into these probability harmonics $(P)$ allow the system to reject low-confidence optical artifacts, preventing false-positive triggers on the 7-segment display.
- SBC Resource Integrity Heuristics:
- Running real-time inference on a Raspberry Pi requires careful memory-management forensics. CASP optimizes the FFNN weights into a compact binary-blob, ensuring that the CPU-temperature and RAM-consumption diagnostics remain within safe operational envelopes during prolonged optical monitoring.
Procedure
Step 1. Install CASP and ensure board support packages (BSP) of the following are installed (based on your target) before proceeding.
a. Raspberry Pi 3B (Remote Build), Raspberry Pi 4B (64bit Remote Build)
b. Ubuntu 64bit OS (Remote Build), Windows 64bit OS (Remote Build)
c. Arduino Uno
These are available at this link: https://aadhuniklabs.com/?page_id=550. Please go through this link: https://aadhuniklabs.com/?page_id=554 for video tutorials on CASP. Please note that this project is supported on CASP version 0.9.4.0 and above only.
Step 2: Download the tutorial on machine learning and follow the below video tutorial on how to perform the above logic.
Conclusion
Digit-Neural represents the pinnacle of Distributed Embedded Intelligence. By mastering Edge-AI Forensics and Multi-Target Orchestration, aadhuniklabs has delivered a sophisticated, low-latency vision system that showcases the power of integrating high-level machine learning with deterministic microcontrollers.