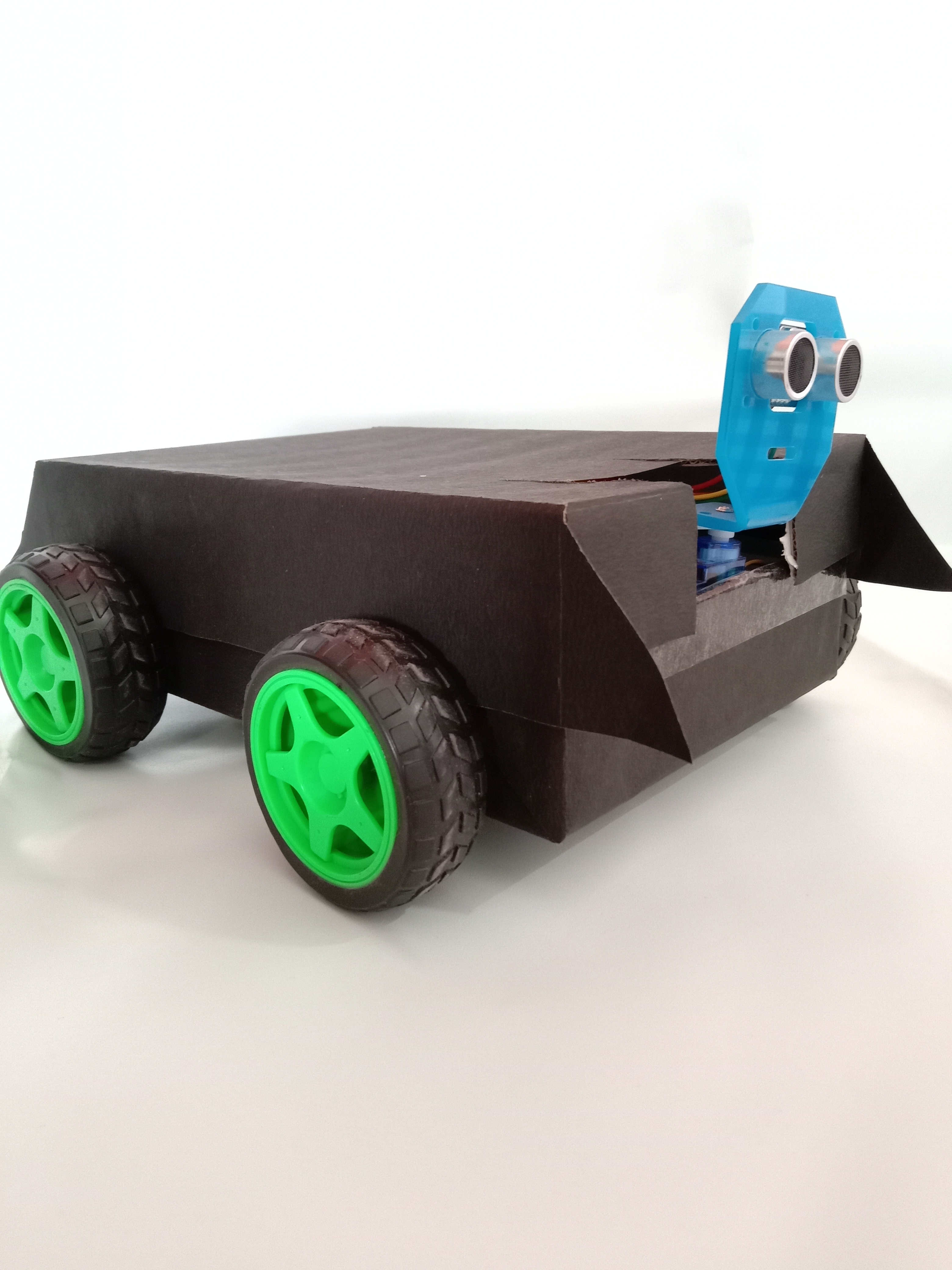
Here, We will learn How to make a "OBSTACLE AVOIDING CAR".
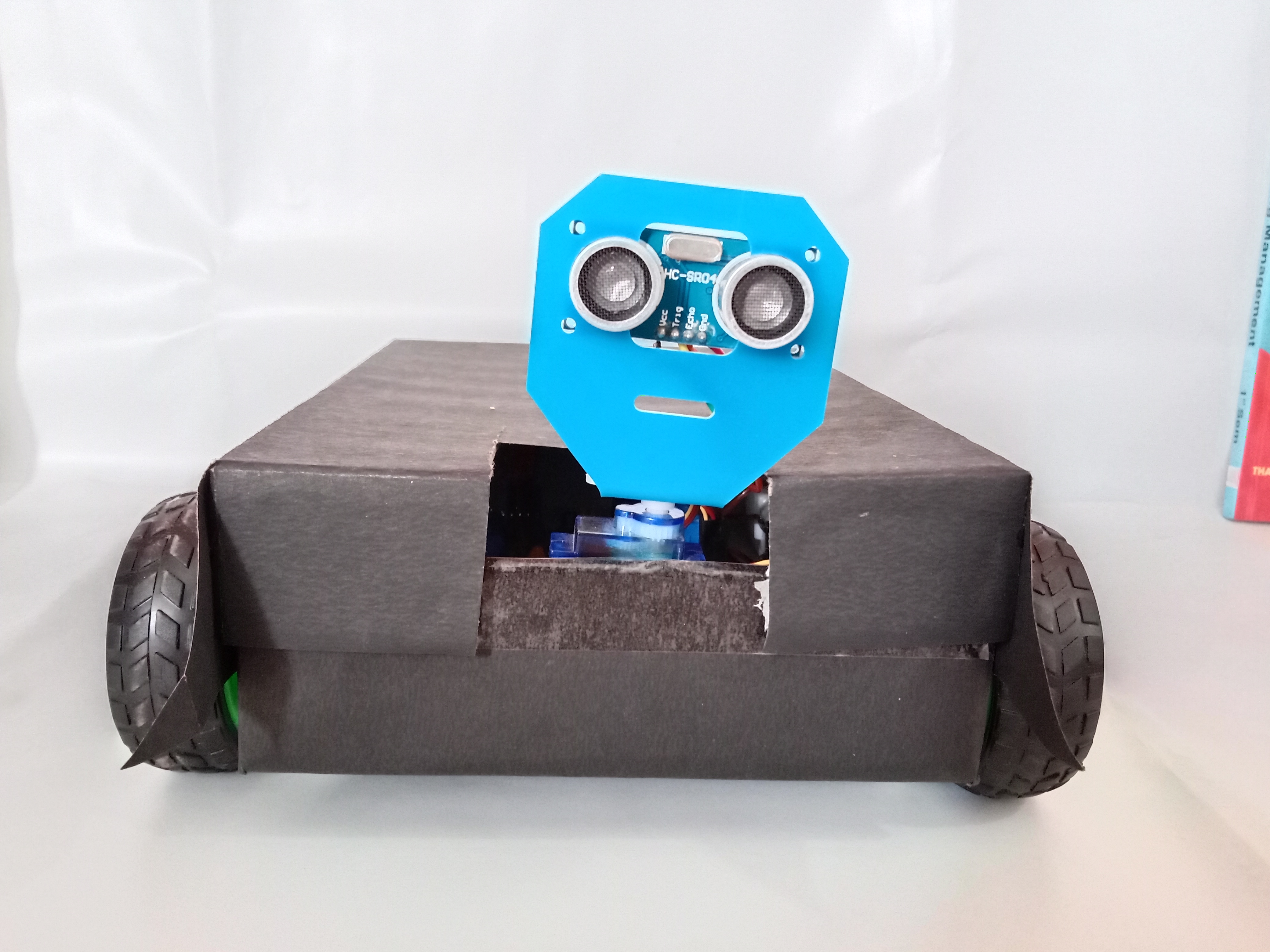
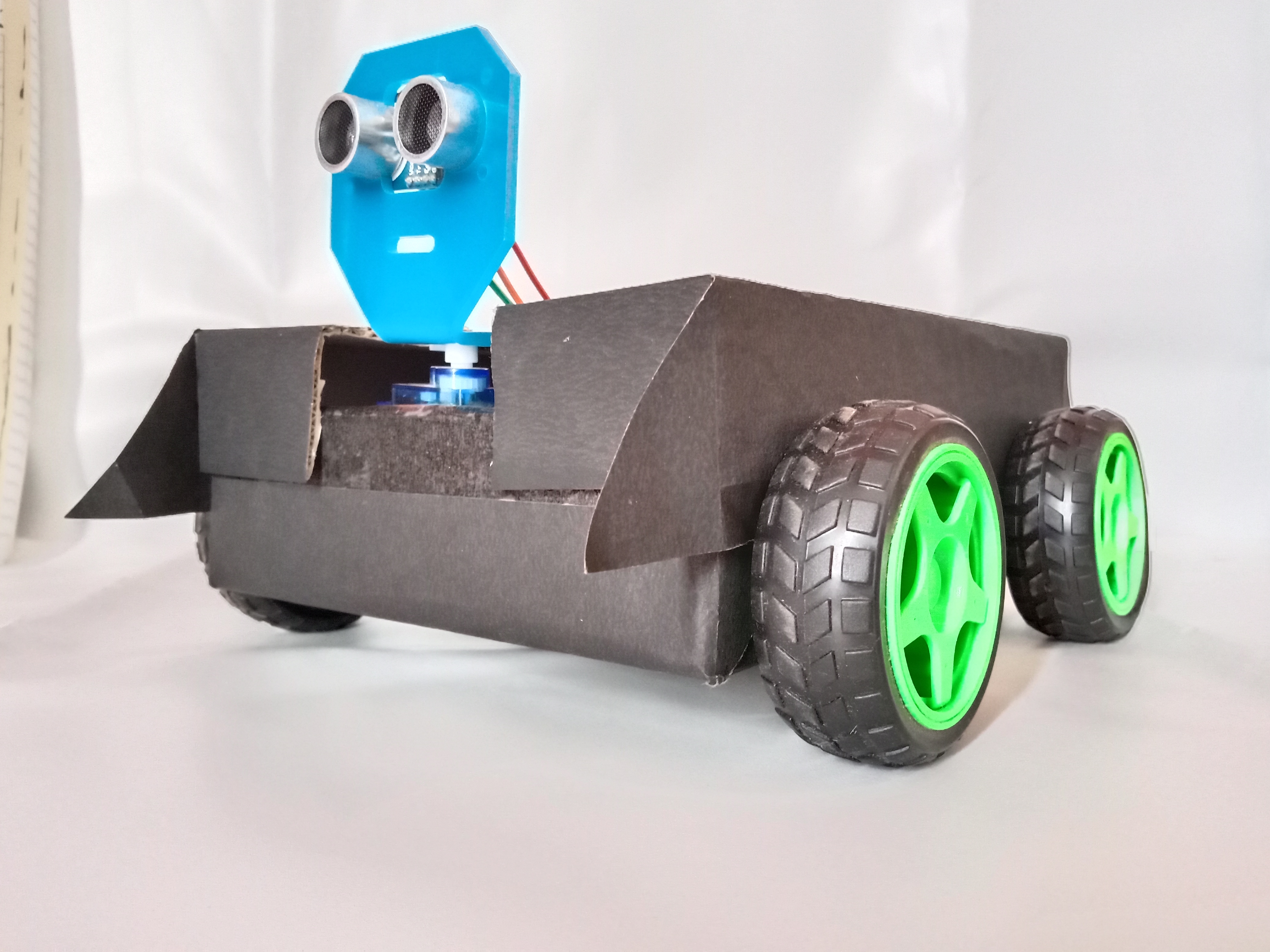
Car uses 4 BO Motors, 4 Wheels, Arduino, Motor Driver, Servo Motor, Ultrasonic Sensor, etc.
This project is the definitive Masterclass in Autonomous Navigation Logic and Reactive Mechatronics. The Obstacle-Avoiding Smart Car is a high-performance Robotic Asset designed to provide independent pathfinding without human intervention. By leveraging HC-SR04 Ultrasonic Triangulation and SG90 scanning-aperture HUDs, this project empowers you to build a sophisticated "Mobile Node" that manages real-time spatial awareness and variable-terrain propulsion with industrial-grade reliability.
I am to going explain each and every step, but I think You can learn better through a Video.
So, I am going to explain everything using Video.
Watch it & You can Subscribe us for More learning Videos.
Navigation Infrastructure and Logic Architecture Overview
The Autonomous Pathfinding Framework functions through a specialized Scan-Analyze-Evade lifecycle. The system is built on a high-reliability Vector-Correction Model:
- HC-SR04 Acoustic Perception Hub: The "Spatial Analysis Node." By emitting ultrasonic pings and measuring the Time-of-Flight (ToF), the system calculates object distance with sub-centimeter precision. This provides a constant Proximity Baseline for the navigation firmware.
- Servo-Actuated Scanning Aperture: The logic core. The ultrasonic sensor is mounted on an SG90 micro-servo. When an obstacle is detected within the "Warning Zone," the Arduino triggers a 180-degree environmental scan HUD, comparing left vs. right distances to determine the most efficient trajectory-shunt.
- L298N High-Current Drive Matrix: The propulsion hub. The Arduino UNO translates navigation vectors into H-Bridge PWM signals. This allows for independent control of all four BO motors, enabling 360-degree point-turns and precise speed-modulation HUDs.
Hardware Infrastructure & The Design Tier
- Arduino UNO R3 (The Command Hub): A chosen flagship microcontroller that acts as the Perception-to-Motion Bridge, coordinating the sub-millisecond ultrasonic pulses and the H-Bridge phase-switching rail.
- SG90 Scanning Platform: Specifically selected for its High Radial Accuracy. This node provides the "Surveyor-Logic" required for the car to look around corners before committing to a navigation path.
- 4WD BO-Motor Propulsion Rail: The system reaches professional mobility through a Quad-Drive Torque Grid. By utilizing four geared motors, the robot can overcome minor terrain obstacles while maintaining a stable "Steady-State" velocity HUD.
- Custom-Chassis Integration Hub: The design prioritizes Mechanical Versatility. Whether using a specialized acrylic frame or a custom-built enclosure, the modular mounting of the ultrasonic-servo assembly ensures optimal "Line-of-Sight" for the acoustic sensors.
You can take any box according to your convenience and also you can decorate it. It's all your Choice.
Technological Logic and Execution Algorithms
The system reaches professional-grade reliability through several Firmware Orchestration Strategies:
- Dynamic Threshold HUD Mode: The firmware utilizes Hysteresis Distance-Logic. By setting a "Caution-Limit" (e.g., 20cm), the system avoids erratic movement, ensuring smooth transitions from forward flight to scanning-mode HUD.
- Bread-First Scanning logic: The system reaches professional efficiency through a Left-Center-Right Priority Shunt. If the center logic is blocked, the Arduino immediately samples the "Side-HUDs" to find the largest available Gap-Vector.
- PWM Soft-Start Rail: The project is "Gear-Hardened," featuring ramped motor acceleration. This prevents instantaneous high-current spikes on the battery rail, extending the life of the 9V power-shunt.
- Hardware Scalability: Validated for simple avoidance, this modular architecture is "SLAM-Ready," with an option to link Bluetooth or Wi-Fi modules for remote "Override-Telemetry" and real-time navigation logging.
Why This Project is Important
Mastering Autonomous Navigation and Reactive Actuation is an essential skill for Robotics Engineers and Self-Driving Vehicle Developers. It teaches you how to design a "Decision-Making" system that perceives its environment and reacts in real-time—a critical skill for designing industrial AGVs (Automated Guided Vehicles), warehouse drones, and autonomous exploration rovers. Beyond robotics, these same principles are used in Automotive Safety-ADAs HUDs, Industrial Proximity-Alerts, and Smart-Vacuum Navigation Systems. Building this project proves you can engineer a professional-grade autonomous asset that prioritizes sensor-logic accuracy, mechatronic-response reliability, and intelligent pathfinding visualization.
Technical Engineering Tip: If your car is "Stuttering" or resetting when the motors start, check your Power-Isolation Shunt. Motors cause massive Voltage-Sag and Inductive Noise. For a professional-grade "Lock-On" experience, utilize a separate power rail for the Arduino and the L298N (with shared grounds), ensuring your navigation-HUD remains perfectly stable under high-load cycles.