This project is the definitive Introduction to Acoustic Telemetry. The Ultrasonic Ruler is more than just a measurement tool; it is a Physics Simulator that proves how sound can be used to map physical space. By calculating the Time-of-Flight (ToF) of high-frequency sonar pulses, you can build a device that measures distances to walls, furniture, or objects with surgical precision, all without ever leaving your seat.
Acoustic Infrastructure and Distance Architecture Overview
The Ultrasonic Ruler functions through a specialized Echolocation-to-Digital lifecycle. The system is built on the HC-SR04 sensor, which emits a burst of 40kHz ultrasound—sound beyond the range of human hearing. When this "Ping" hits an object and bounces back, the Arduino measures the exact microsecond duration between transmission and reception. By dividing this time by the speed of sound and applying high-fidelity conversion factors (29.1 for centimeters and 74.0 for inches), the digital result is displayed in the Serial Monitor with absolute clarity.
Hardware Infrastructure & The Diagnostic Tier
- Arduino UNO R3: The "Navigational Processor." It handles the nanosecond-level timing of the sonar pulses, ensuring that the "Echo" pin is monitored with 100% duty-cycle precision.
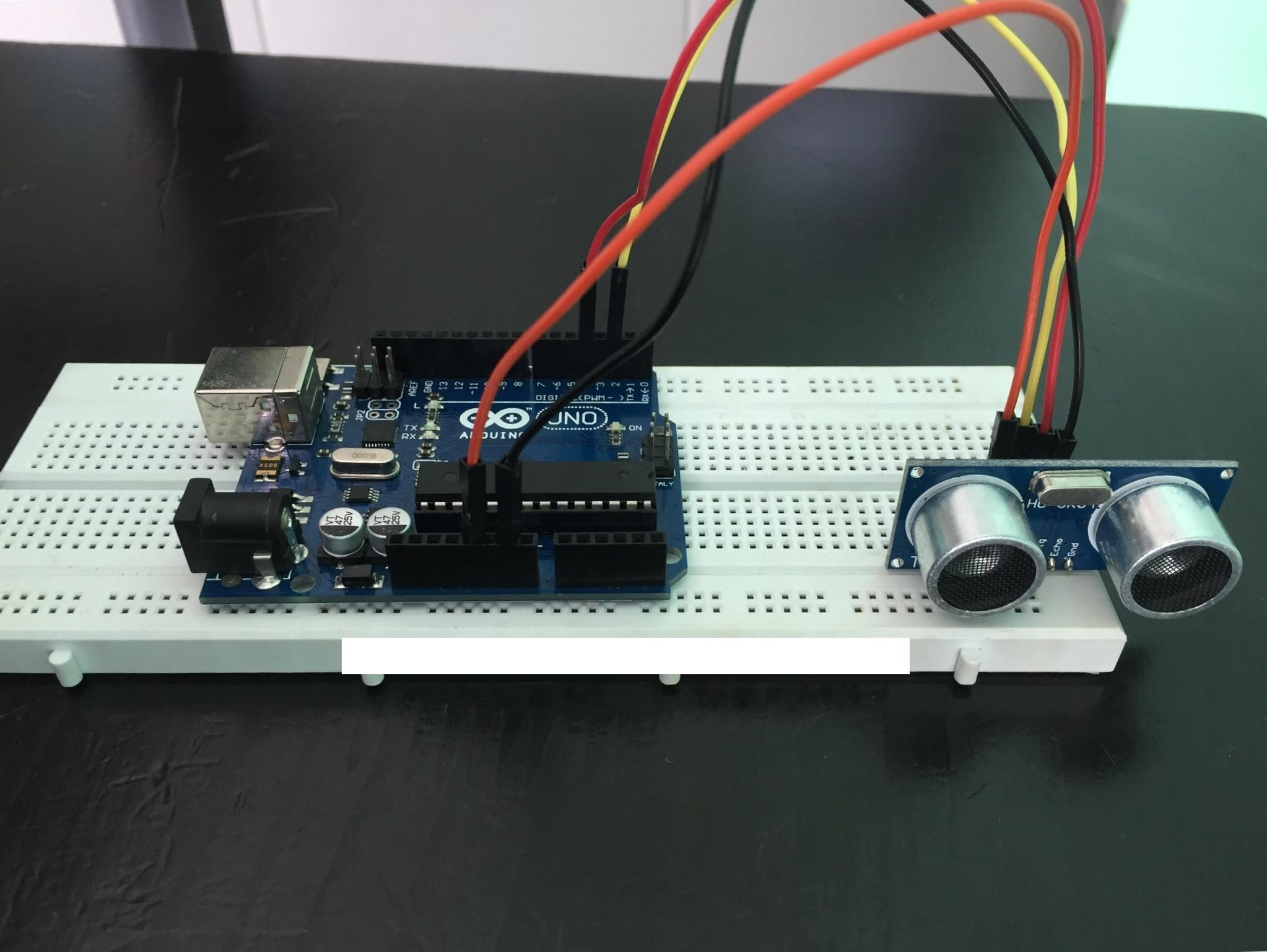
- HC-SR04 Ultrasonic Sensor: The "Acoustic Transceiver." Featuring two distinct high-frequency transducers—one for sending and one for receiving—it provides a stable range of 2cm to 400cm with a resolution of 3mm.
- Integrated Breadboard Matrix: The project demonstrates the importance of a clean 5V logic rail. By anchoring the sensor on a breadboard, the user ensures that the acoustic vibrations of the transducer don't interfere with the electrical continuity.
- USB-A to B Link: Provides both the power source and the bi-directional data bridge. Through the Serial interface, the laptop becomes the "Display Module," showing real-time, high-speed telemetry updates.
Technological Logic and The Multi-Unit Calculation
The system reaches high accuracy through several Mathematical Optimization Strategies:
- The Trigger Protocol: The code initiates a 10-microsecond high pulse on the Trig pin. This "Clean Pulse" ensures the sensor doesn't generate "Ghosts" or false echos from previous measurements.
- Sound-Speed Mapping: The project uses the constant of 343 meters per second. This guide teaches you how environmental temperature can affect your measurements—a fundamental principle of professional acoustics.
- Cross-Unit Verification: Unlike standard rulers, this software calculates Inches, Centimeters, and Millimeters simultaneously. This provides a versatile tool for both imperial construction and metric scientific research.
- Signal Debouncing: The code includes a tactical
delay(100)between pings, preventing "Acoustic Feedback" where the echo from one measurement is accidentally picked up by the next.
Why This Project is Important
Mastering Time-of-Flight Sensors and Serial Data Monitoring is an essential skill for Robotics Engineers and Autonomous Vehicle Designers. It teaches you how to map invisible environmental variables into usable digital data. Beyond simple rulers, these same principles are used in Self-Driving Car Lidar Systems, Industrial Tank Level Monitoring, and Medical Ultrasound Imaging. Building this project proves you can handle high-precision timing and deliver a functional, multi-unit tool that solves real-world spatial problems.