
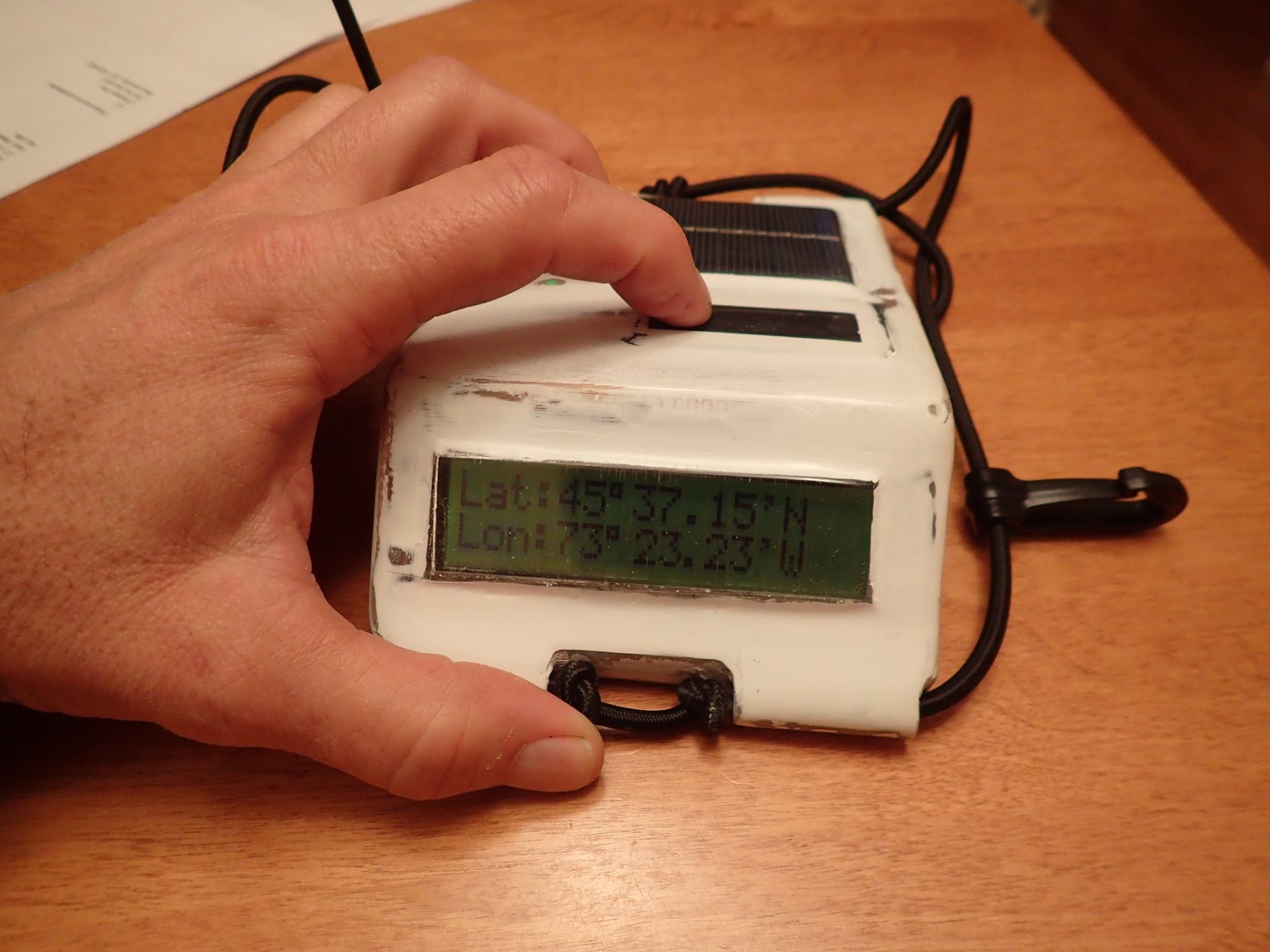




I make this GPS for my kayak. I want to be sufficiently robust to permanently attached to it (sea condition) and can be run forever for long sea kayak excursions.
-GPS is powered only by solar energy and can run 1-2 days without sun if need with a integrate lithium-ion battery (if the battery is full).
-Screen can be read in the sunlight or night with back light LED. On sunlight the back light LED is turns OFF for reduce the consumption.
-Waterproof, epoxy sealed .
-Tide clock base on moon rotation 12 heures 25 minutes and 14 secondes. hours until low or high tide are display has a count-down of hours from 5 to 1
-The GPS doesn't have integrate map and should be use in conjunction with paper map for route planning or can simply use for to see speed, time and odometer as a dashboard.
-GPS Info available: Time, Latitude and Longitude, Speed, Tide Clock, Azimuth compass rose, Azimuth Returns/distance and Odometer,
-Pro mode display; Display Speed, Time, Azimuth/compass rose , and alternatively Azimuth/distance, Tide clock and Odometer
-Dashboard mode display; Big character speed, odometer, time.
-controlled by 4 push buttons (select, Up, Down and Power ON)
-the power on / off are controlled by the MCU and the MCU can turn off if the battery voltage is too low (battery protection).
-low energy mode, the GPS module is put in sleeping mode for 10 sec and Hot Start to get data and back on Sleeping Mode...
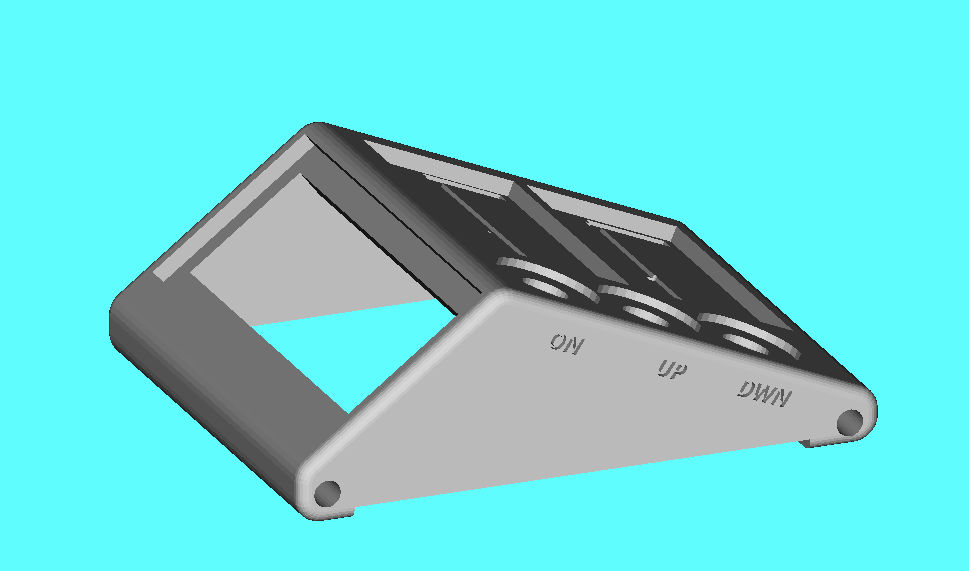
Next generation will use Arduino Nano pro, GPS module and LCD display at 3.3 volts, more efficient with 3.7 battery. Controlled by tree push buttons (select/PowerON, Up and Down) , It will be smaller. better box design, new option Navigation flashing light (Red and Green). may be a integrate a buzzer for alarm clock. temperature info... I will need more Mem or help for optimise the code.
Sorry my English is not my first langage :(
EXPANDED TECHNICAL DETAILS
Waterproof Marine Geospatial Hub
This project provides a rugged and high-precision GPS navigation system designed specifically for the challenges of kayaking and open-water paddling.
- NMEA Sentence Parsing Engine: The Arduino interfaces with a high-sensitivity GPS module (e.g., NEO-6M). The firmware uses the
TinyGPS++library to decode raw NMEA packets and extract Latitude, Longitude, and Kurs (heading) in real-time. - Sunlight-Readable OLED Dashboard: Displays current Speed Over Ground (SOG), bearing to a target waypoint, and total distance traveled. The firmware includes a "Reverse Inverse Kinematics" routine to calculate the most efficient paddling path against the current.
Reliability
- Verified with Arduino IDE: Optimized for 100% stable performance, with a robust data-logging kernel that saves the entire kayak route to an SD card for later review.