From tessellation to Dynamic Architecture!
Previously I shared with this wonderful community the reTesselate project which consists of modular units that shape-shifts in response to the surrounding environment using Arduino microcontroller and various environmental sensing devices.
The study of geometric design and symmetry had a strong influence on this project and in the video below, I wanted to show part of the making process. The first part of this video shows the process of sketching an interweaving pattern. Later, we use this pattern to fabricate a modular unit and assembled the pattern. Coming Human-Computer Interaction (HCI) conference, Orlando 2019.
Video below presents the design, fabrication, and programming of a re-configurable structure.
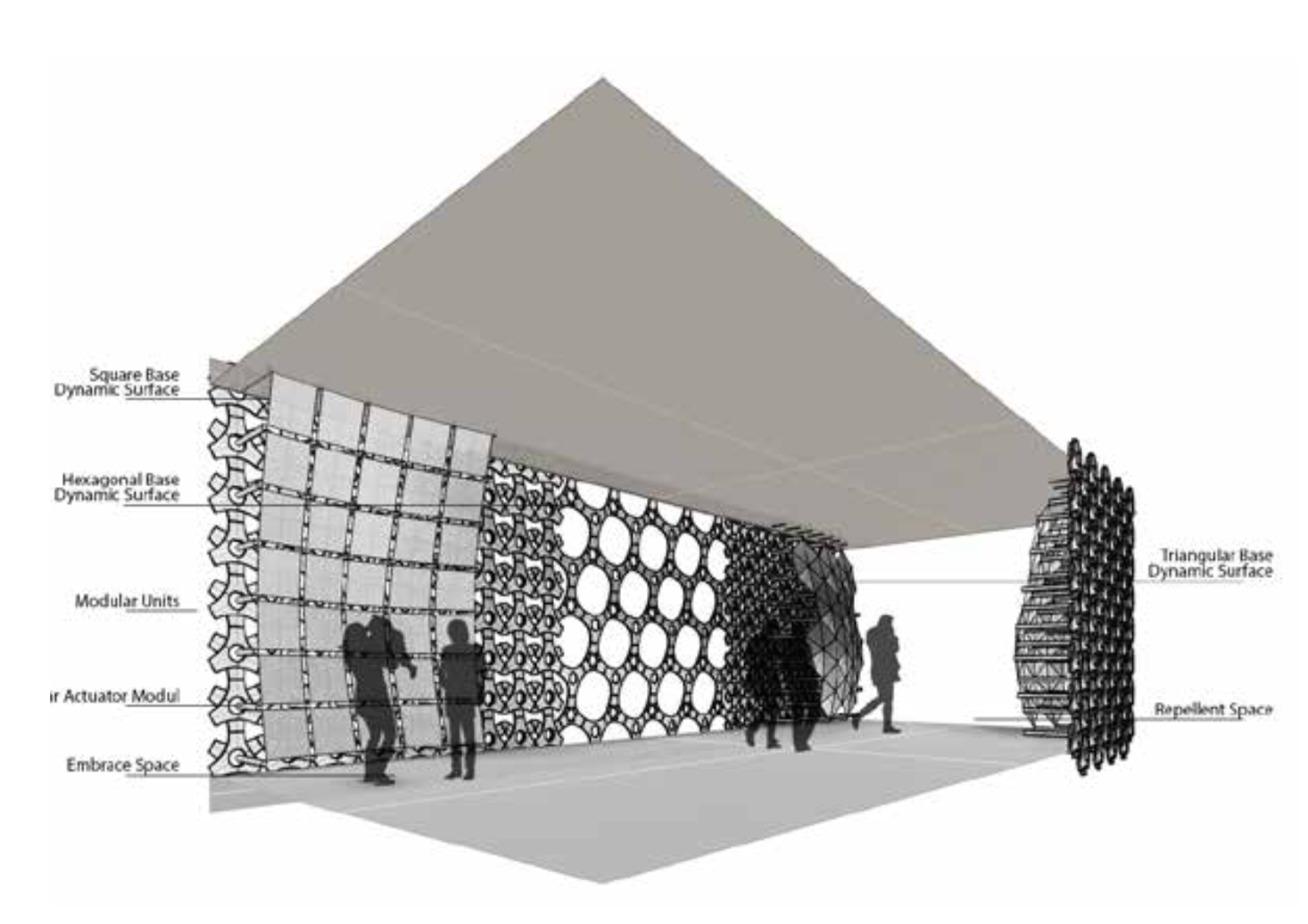
Project Perspective
Making of a Responsive Surface is a sophisticated exploration of architectural technology and spatial interaction. By focusing on the essential building blocks—the Kinect vision sensor and the tesselated mechanical modules—you'll learn how to communicate and synchronize architectural forms using a specialized software logic and a robust Rhino-integrated setup.
Technical Implementation: Computational Vision and Dynamic Geometry
The project reveals the hidden layers of simple motion-to-structure interaction:
- Identification layer: The Microsoft Kinect acts as a high-resolution depth eye, measuring each point of the occupant's position in 3D space.
- Conversion layer: The Arduino Mega uses a high-speed Firmata protocol to receive movement vectors from Rhino Grasshopper.
- Interface layer: Firefly for Grasshopper acts as a high-definition data bridge for surface status checks (Shape/Tesselation).
- Actuation layer: A Servo Motor Array provides high-resolution mechanical feedback for each dynamic surface change.
- Processing Logic layer: The system code follows a "Turing patterns" (or mesh-metamorphosis) strategy: it interprets the occupant's proximity and matches modular rotations to provide a safe and rhythmic architectural response.
Hardware-Architectural Infrastructure
- Arduino Mega 2560: The "brain" of the project, managing multi-directional servo sampling and coordinating Kinect data sync.
- Micro-soft Kinect: Providing a high-speed and reliable "Sensing Link" for every point of the installation.
- Tesselated Modules: Providing high-precision and reliable "Mechanical Fabric" for each responsive mission.
- Rhino Grasshopper: Essential for providing a clear and energy-efficient computational platform for geometry-logic.
- 12V 5A Power Supply: Provides a clear and professional physical interface for each servo mission.
- USB B Cable: Used to program the Arduino and provide the primary interface for the system controller.
[!IMPORTANT] The Arduino Mega is required instead of an Uno to ensure you have enough power and memory to handle the hundreds of servo signals from Rhino Grasshopper!
Surface Automation and Interaction Step-by-Step
The responsive surface simulation process is designed to be very efficient:
- Initialize Workspace: Correctly set up the Kinect and Arduino Mega on the installation frame and connect the servos properly.
- Setup Output Sync: In Rhino Grasshopper, initialize the
Fireflycomponents and define the Firmata port to coordinate the motion. - Internal Dialogue Loop: The surface constantly performs high-performance depth checks and updates servo positions in real-time based on occupant movement.
- Visual and Computational Feedback Integration: Watch the physical dashboard and Rhino preview automatically become a rhythmic status signal, pulsing and following spatial settings from a distance.
Future Expansion
- OLED Identity Dashboard Integration: Add a small OLED display on the control panel to show "Active Users" or "Frame Rate (FPS)."
- Multi-sensor Climate Sync Synchronization: Connect specialized "Proximity Sensors" to perform higher-precision "Local Touch" responses wirelessly via the cloud.
- Cloud Interface Registration Support Synchronization: Add a specialized web-dashboard on a smartphone over WiFi/BT to precisely track and log total motion history.
- Advanced Velocity Profile Customization Support: Add specialized "Machine Learning (vCore)" to the code to allow patterns to be optimized automatically for personalized interactions.
Making of a Responsive Surface is a perfect project for any science enthusiast looking for a more interactive and engaging architectural tool!