Features
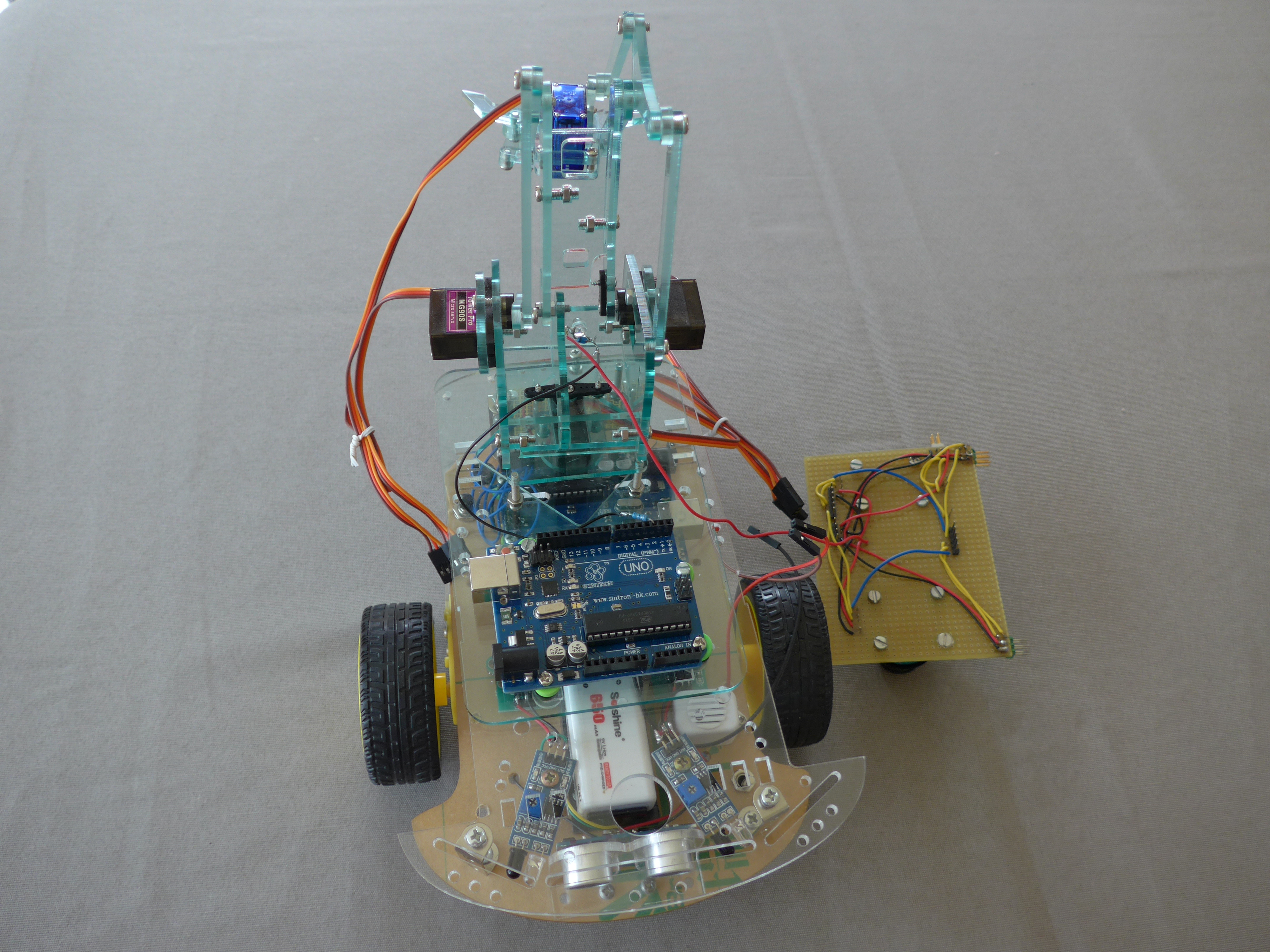
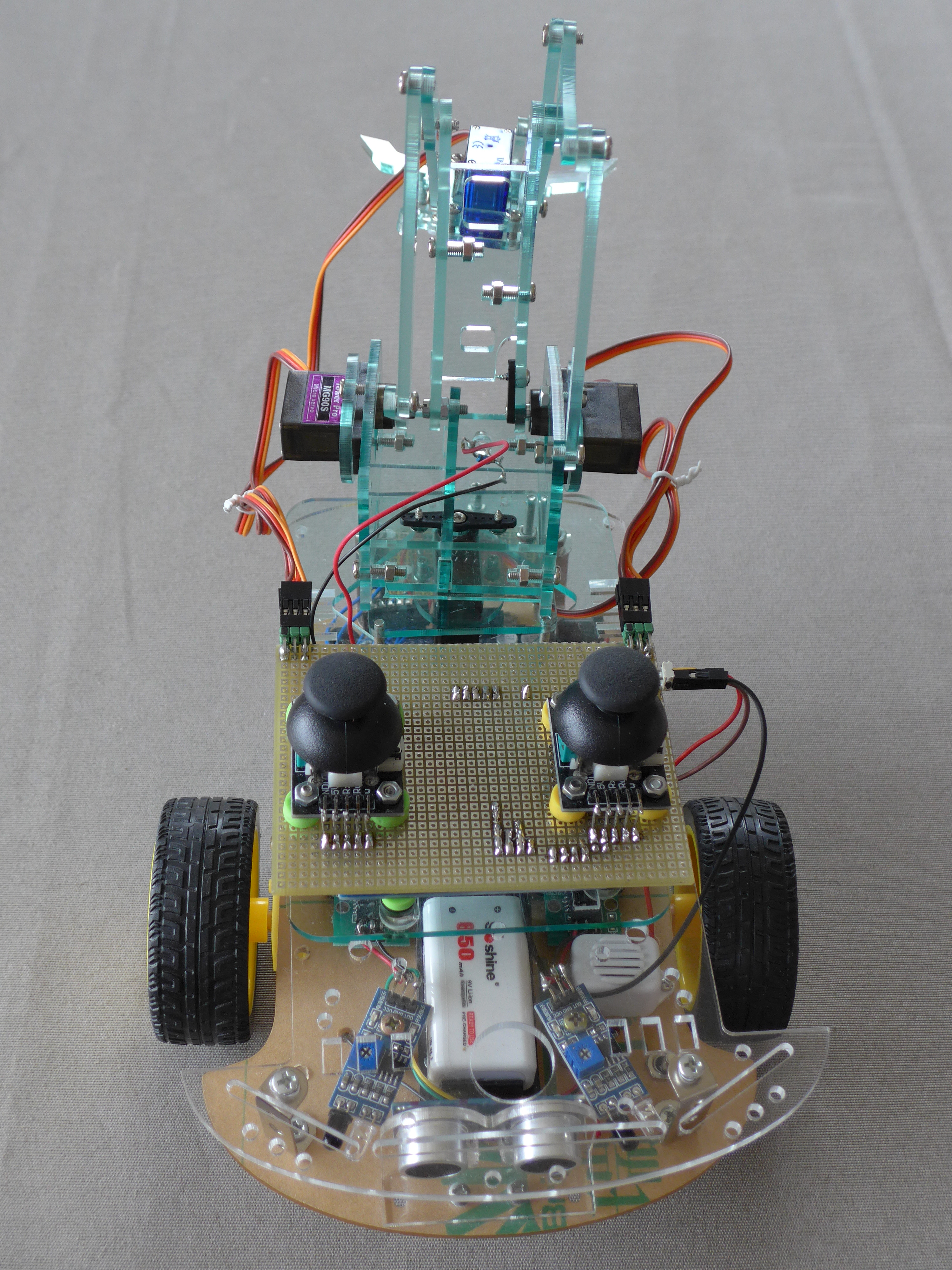
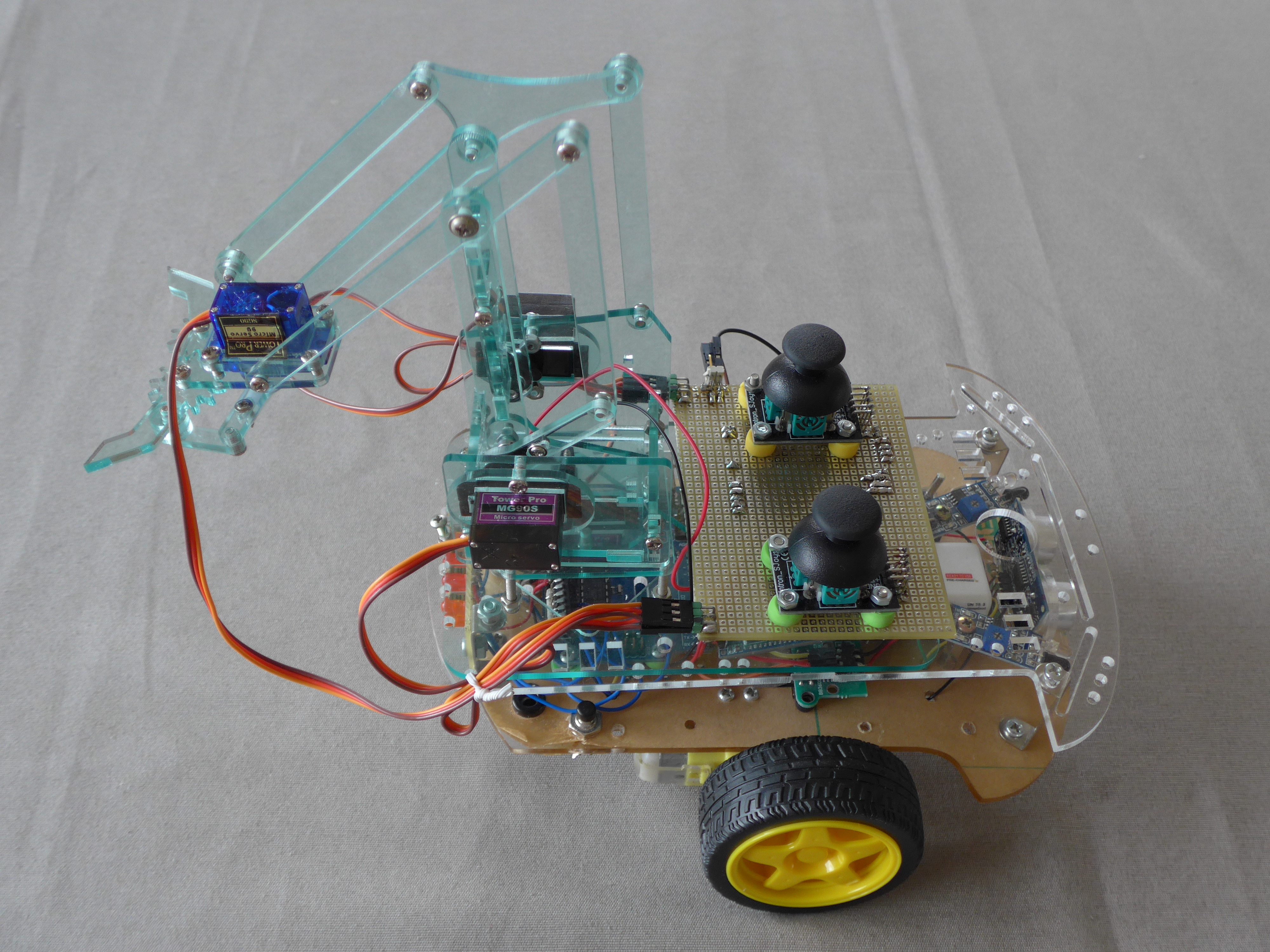
The MAX009 is a 4 degrees of freedom (4DOF) robotic arm mounted on a 2 wheel drive (2WD) smart robot car.
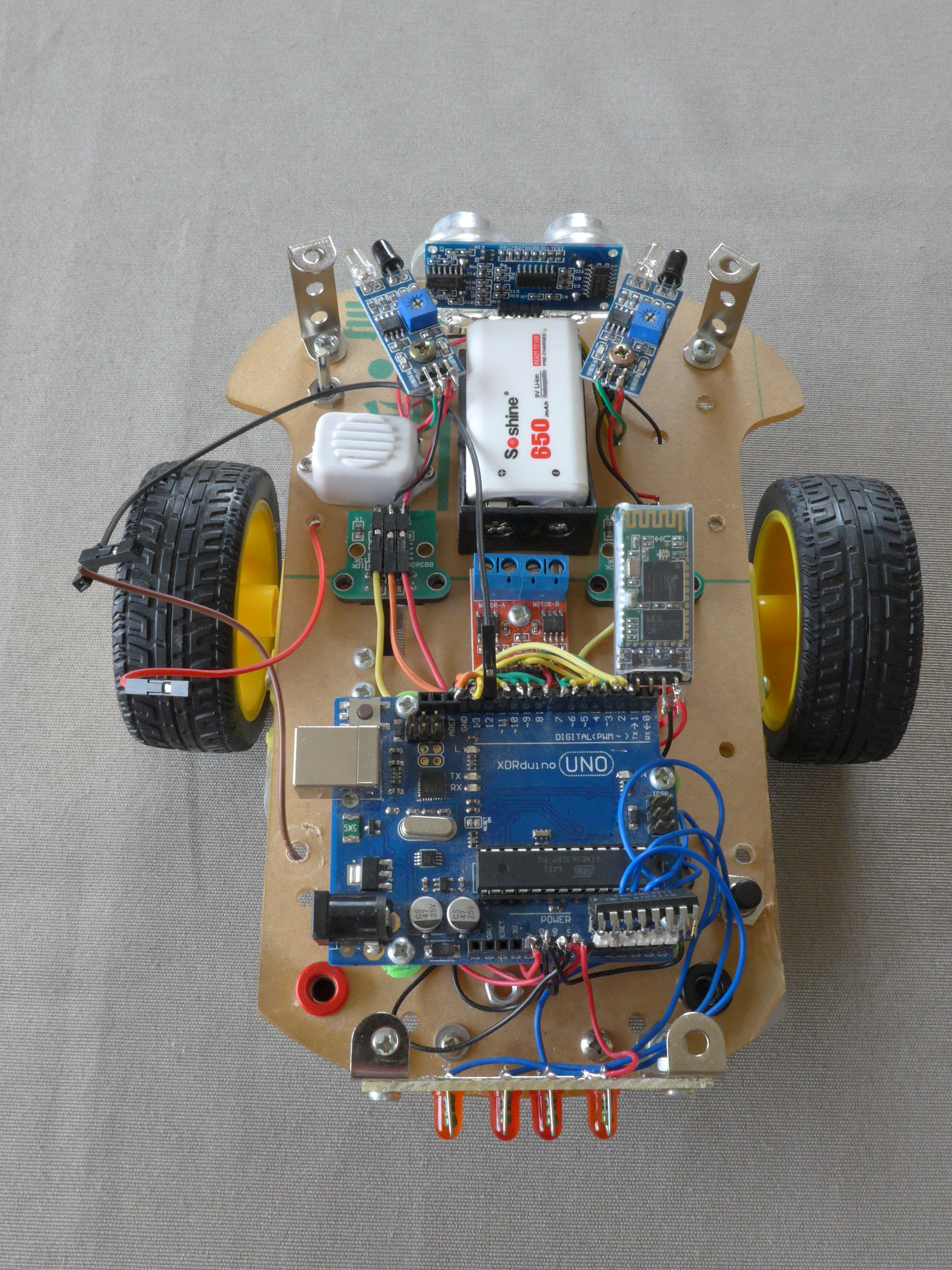
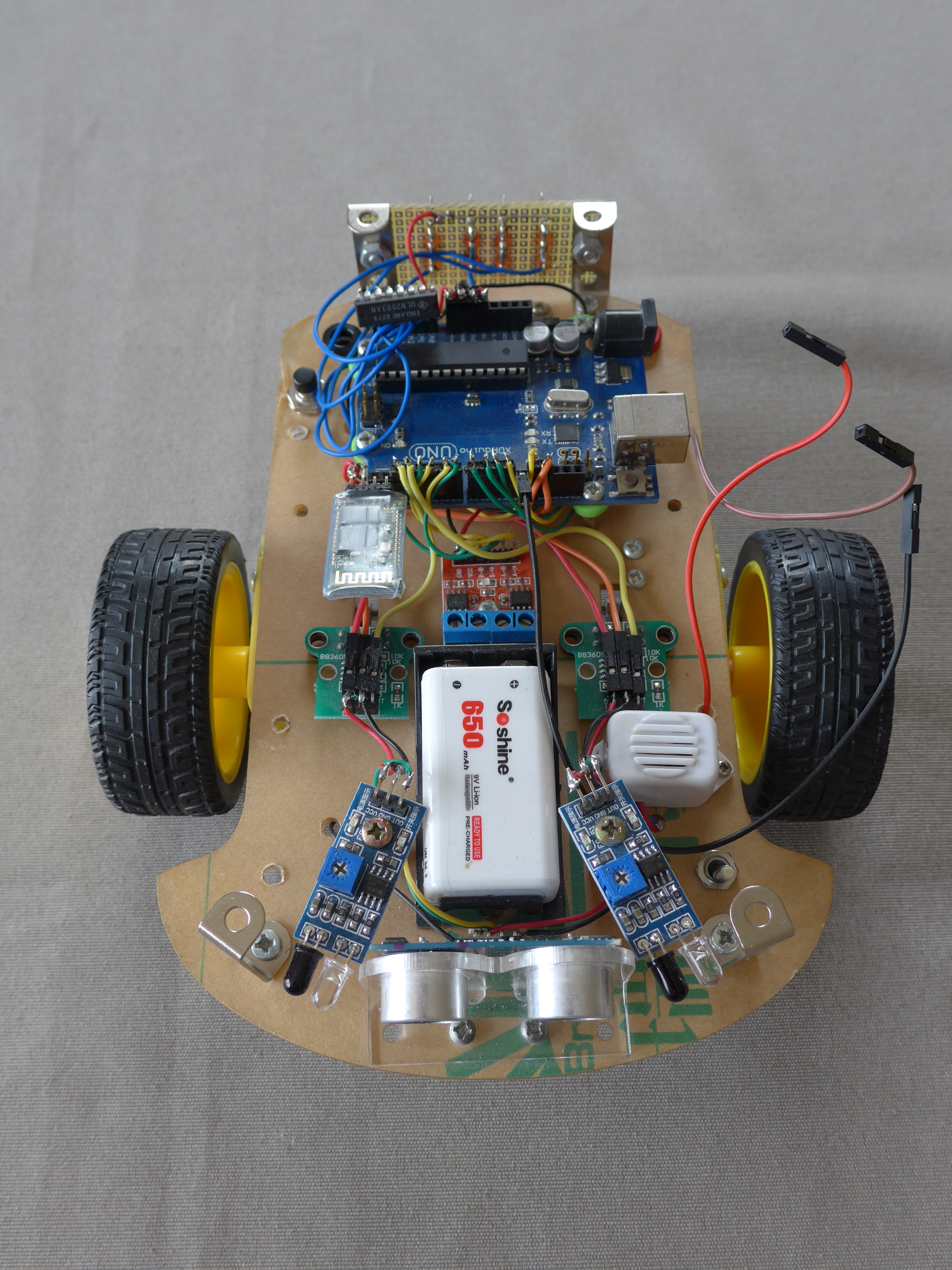
The smart robot car has 2 DC motors and 2 infrared speed sensors, allowing accurate speed regulation of the 2 wheels. 1 ultrasonic distance sensor and 2 infrared proximity sensors can be used for obstacle avoidance . It has head, rear, left and right led lights, horn, ...
The robotic arm is a MeArm with 2 joysticks for manual control and an extra white led on the base.
The MAX009 is controlled by 2 arduino's (one for the car, one for the arm) communicating between each other and with the external world via bluetooth. It is entirely remote controllable by a dedicated android app. It can be programmed via a simple LOGO interpreter embedded in one of the arduino's.
One logo program can be stored in the Arduino EEPROM and started by pressing a push button. 10 programs can be stored in the smartphone memory using the MAX009 android app. Both the smart robot car and the MeArm are powered by a single 9V Li-Ion battery.
Photos Gallery
Videos
Android app
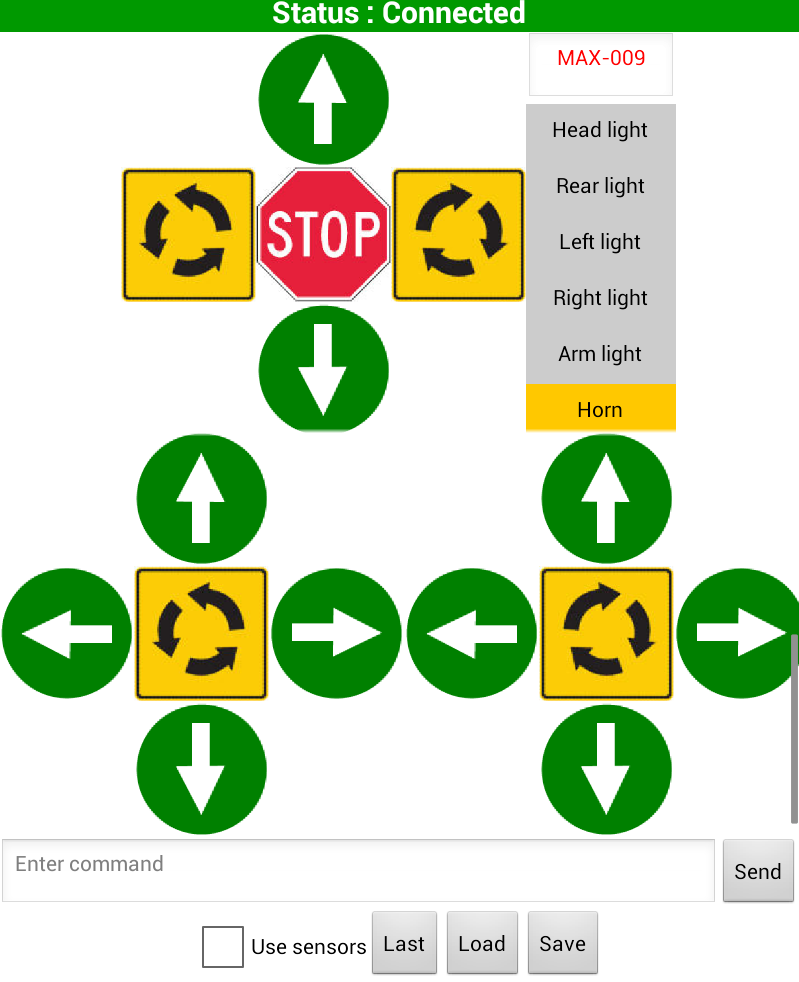
On the top section, the arrows control the smart robot car. The buttons stack controls the lights and the horn. In the middle part, the double set of arrows controls the MeArm robotic arm, just like the 2 joysticks on the Arduino shield.
At the bottom, LOGO commands can be entered and sent to the robot. The last command can be recalled by pushing the “Last” button. 10 commands (or list of commands) can be saved and recalled from the phone memory using the“Save” and “Load” buttons.
Finally, the robot car can be controlled by the phone gyro sensors by checking the “Use sensors” box.
Supported LOGO commands
- fw (n) : move forward (by n steps)
- bw (n) : move backward (by n steps)
- tl (n) : turn left (by n steps)
- tr (n) : turn right (by n steps)
- st : stop move
- pa [n] : pause of n milliseconds
- hl [x] : head light [0: OFF, 1: ON]
- ho [x] : horn [0: OFF, 1: ON]
- lr [x] : left rear light [0: OFF, 1: ON]
- rr [x] : right read light [0: OFF, 1: ON]
- ll [x] : left light [0: OFF, 1: CLIGN, 2:ON]
- rl [x] : right light [0: OFF, 1: CLIGN, 2:ON]
- ss [n] : set speed
- sp : save program
- ep : end of program
- rp : run program
- pp : print program
- matl : MeArm turn left
- matr : MeArm turn right
- mafw : MeArm move forward
- mabw : MeArm move backward
- maup : MeArm move up
- mado : MeArm move down
- maop : MeArm open claw
- macl : MeArm close claw
- mast : MeArm stop move
- maip : MeArm reset to initial position
- marp : MeArm run demo program
- mas1 [x] : MeArm move servo 1 to position x
- mas2 [x] : MeArm move servo 2 to position x
- mas3 [x] : MeArm move servo 3 to position x
- mas4 [x] : MeArm move servo 4 to position x
- mali [x] : MeArm set light [0: OFF, 1: ON]
- repeat [n] [cmd] : repeat "cmd" n times
- he : help
Bill of materials
- 2 arduino UNO's
- 1 robot car chassis
- 2 DC motors
- 1 Dual L9110 motor driver
- 2 infrared speed sensors
- 1 dual channel motor driver
- 1 HC-SR04 ultrasonic distance meter with holder
- 1 ULN2003N
- 1 HC-06 Bluetooth receiver
- 1 Buzzer (horn)
- 1 9V (8.2V) Li-Ion battery (like soshine 650) with holder
- 1 Push button
- 1 MeArm kit
- 4 micro servos (3 Tower Pro MG90S + 1 SG90 for the claw)
- 2-joysticks arduino shield (homemade)
- Red and white leds, resistors, screws, …
Final hints
Feel free to buy any low cost kit for the robot car chassis and the MeArm mechanical parts, but put the money in good motors.
For the robotic arm, excepted for the claw, it is mandatory to choose metal bearing servos with analogue controller, otherwise the arm can become shaky or may even oscillate.
For the robot car, stepper motors could provide more accurate moves compared to the DC motors used in this project.
EXPANDED TECHNICAL DETAILS
Integrated Mobile Control
The MAX009 is a specialized robotic platform designed for Android-based remote operation and telemetry.
- HC-05 Serial Bridge: The Arduino communicates with the MAX009 Android App via a Bluetooth serial link. It parses incoming command strings (e.g., 'F' for Forward, 'S' for Stop) to control the onboard motor driver.
- Telemetry Feedback: Unlike simple RC cars, the MAX009 can send sensor data (like battery voltage or distance readings) back to the Android app, displaying a live dashboard on the user's phone.
Robot Mobility
- Efficiency Logic: The firmware uses a custom library to handle "Soft Starts" and "Soft Stops" for the motors, reducing mechanical wear and preventing sudden current spikes from resetting the controller.