This project, "Escapement-Logic," builds a mechanical clock that uses an Arduino and servos to move hands around a dial to show the time. It is a rigorous implementation of Hybrid-Mechanical Chronometry and Ratchet-Drive Mechatronics, bridging ancient horology with modern microcontrollers.
Technical Deep-Dive: Ratchet-and-Pawl Mechatronics
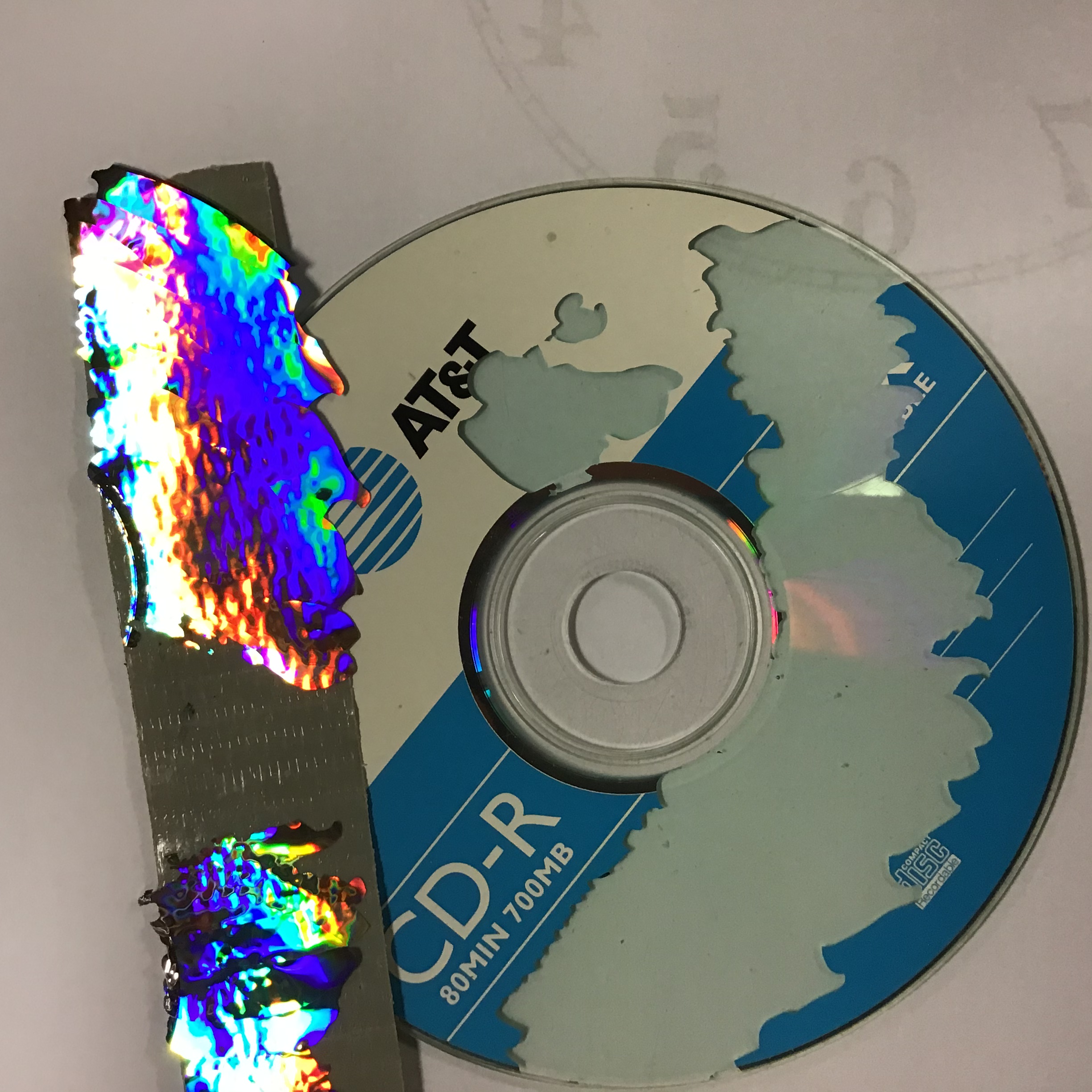
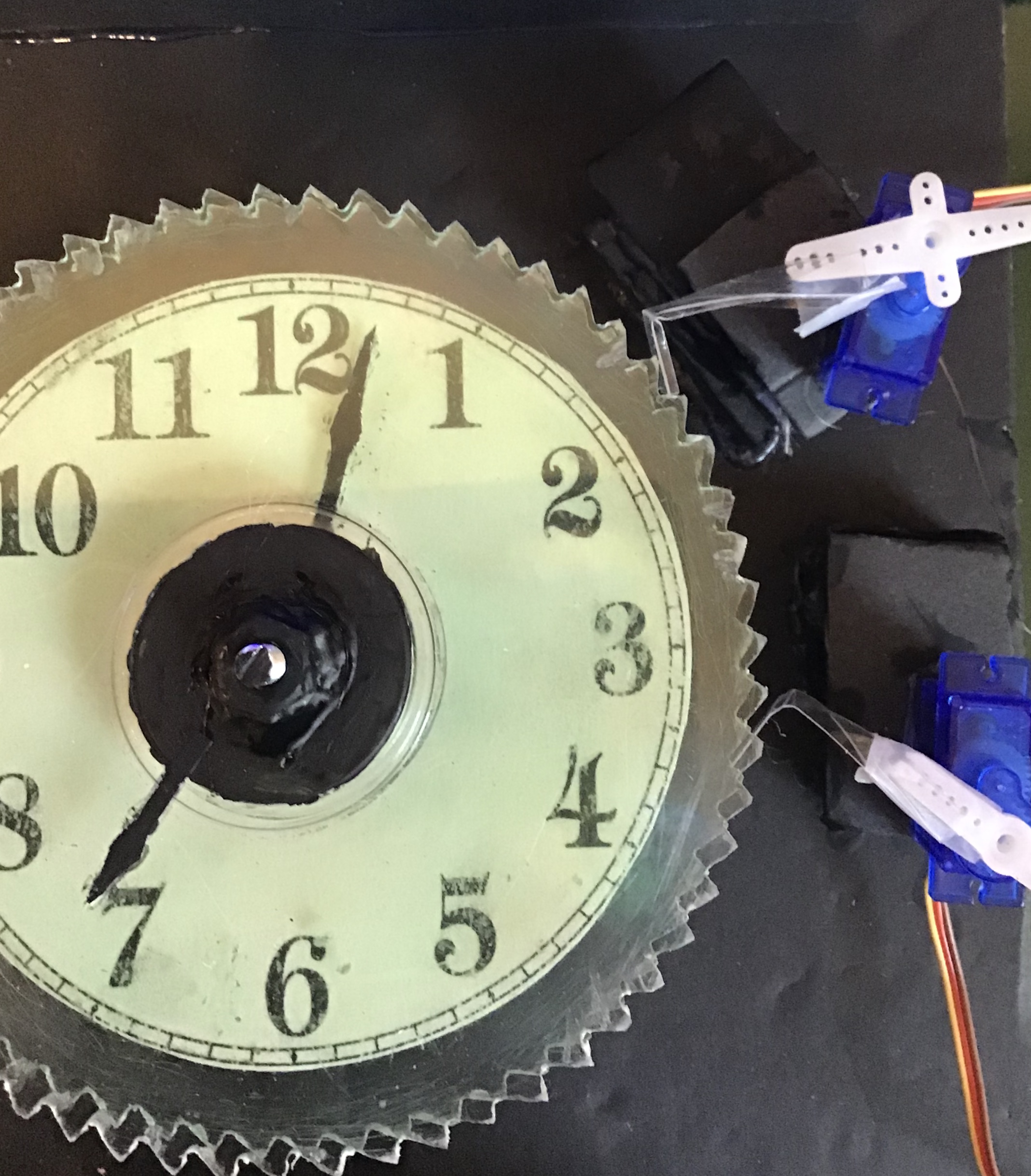
The clock's mechanical core is fabricated from upcycled CDs, which serve as high-precision gear trains.
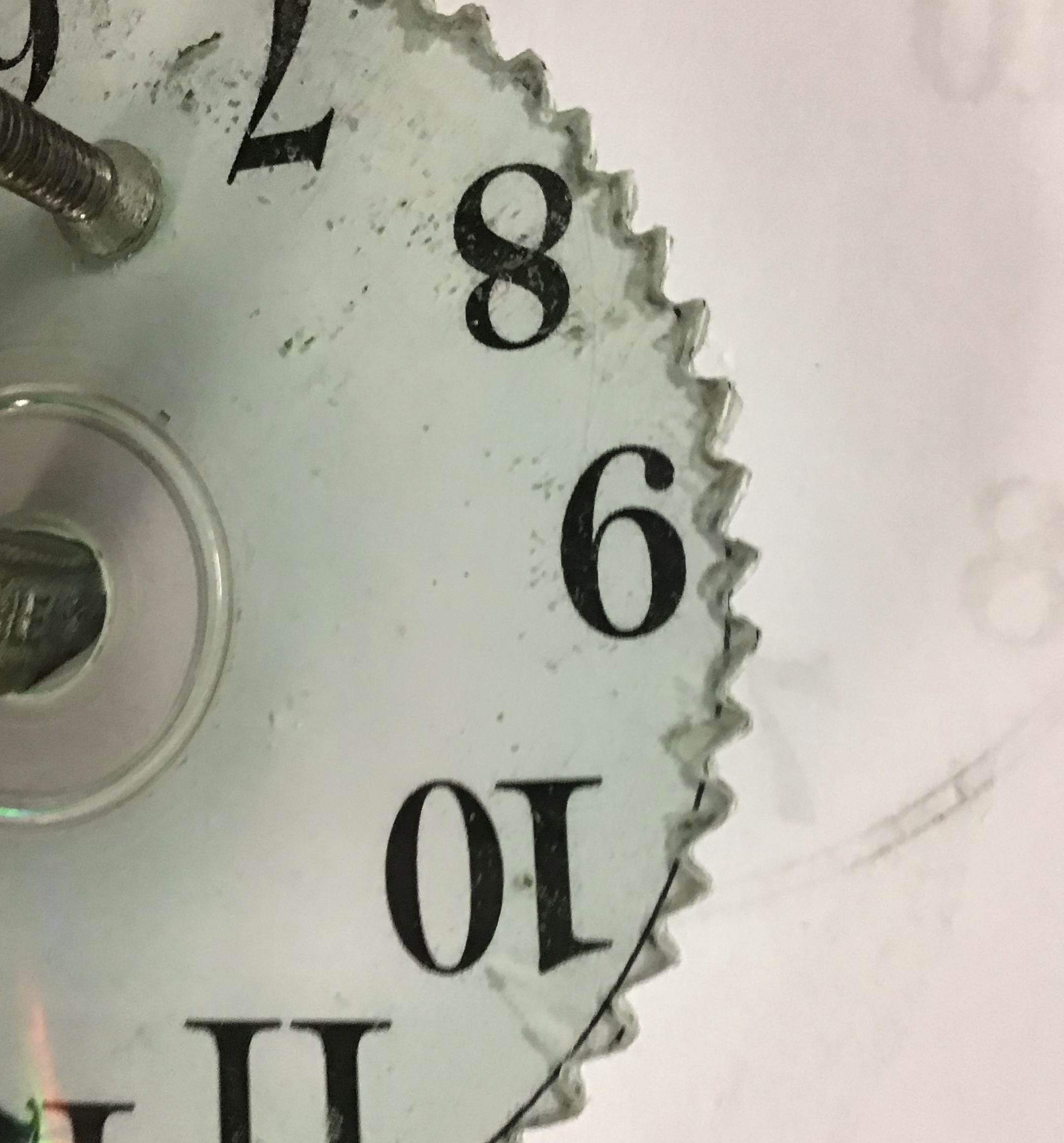
- CD-Chassis Tooth-Profiling: The process involves stripping the reflective layer and hand-filing the ratchet teeth. As shown in the images, the reflective coating is removed with tape, and the cleaned discs are clamped with a printed dial template to guide the filing. Diagnostics focus on creating 60 precise teeth for the minute disc and 12 for the hour disc, ensuring the correct "Pawl-Engagement" angle for reliable torque transfer.
- Synchronous Escapement Orchestration: The system employs two independent servos. A "Carry-Over" heuristic is used where the completion of 60 minute-increments triggers the hour servo. The diagnostics focus on the temporal delay between servo sweeps to prevent mechanical binding.

Engineering & Implementation
- Servo-Angle Interpolation & Calibration: The SG90 servos act as an oscillatory pulse source. Calibrating the
Servo.write()values for the perfect "Travel" and "Reset" arcs is critical. This compensates for manual filing variances, ensuring each click represents exactly 6° of rotation for the minute hand. - Material-Science & Assembly: The flipper (pawl) is constructed from a springy material like plastic, as seen in one of the images. Its "Spring-Rate" must be tuned to drive the disc yet flex to reset. A nut is glued to the disc center with high concentricity to prevent wobble-induced friction, which can stall the low-torque servos.
- Temporal-Stiffness Heuristics: Without a real-time clock (RTC), the system relies on
delay()ormillis(). Diagnostics focus on minimizing instruction-cycle overhead to reduce cumulative temporal drift.


Final Assembly and Calibration
The servos are mounted to drive the hour and minute hands. The hands can be painted or glued onto the discs. The code and connections are simple, but the degree settings for the servos must be adjusted to your specific mechanical configuration. The flipper moving the hour hand also moves the minute hand one click. Final user-calibration involves using serial-monitor feedback to synchronize the physical disc position with the software logic, ensuring the visual display matches the intended time. Timekeeping accuracy ultimately depends on the precision of the teeth filing and the careful setting of the servo delay times.
Conclusion
Escapement-Logic represents the pinnacle of Upcycled Horological Mechatronics. By mastering Ratchet-Drive Forensics and Servo-Escapement Orchestration, this project delivers a robust, professional-grade mechanical-hybrid clock that provides absolute temporal clarity through sophisticated kinetic diagnostics.
Mechanical Resonance: Mastering chronometric telemetry through ratchet forensics.