Project Perspective
Quadcopter is a sophisticated exploration of mechanical technology and autonomous interaction. By focusing on the essential building blocks—the OpenPilot Revolution IMU stack and multi-axis PID feedback logic—you'll learn how to communicate and synchronize kinetic tasks using specialized software logic and a robust high-performance setup.
Technical Implementation: Inertial Measurement and Brushless Commutation
The project reveals the hidden layers of simple motion-to-flight interaction:
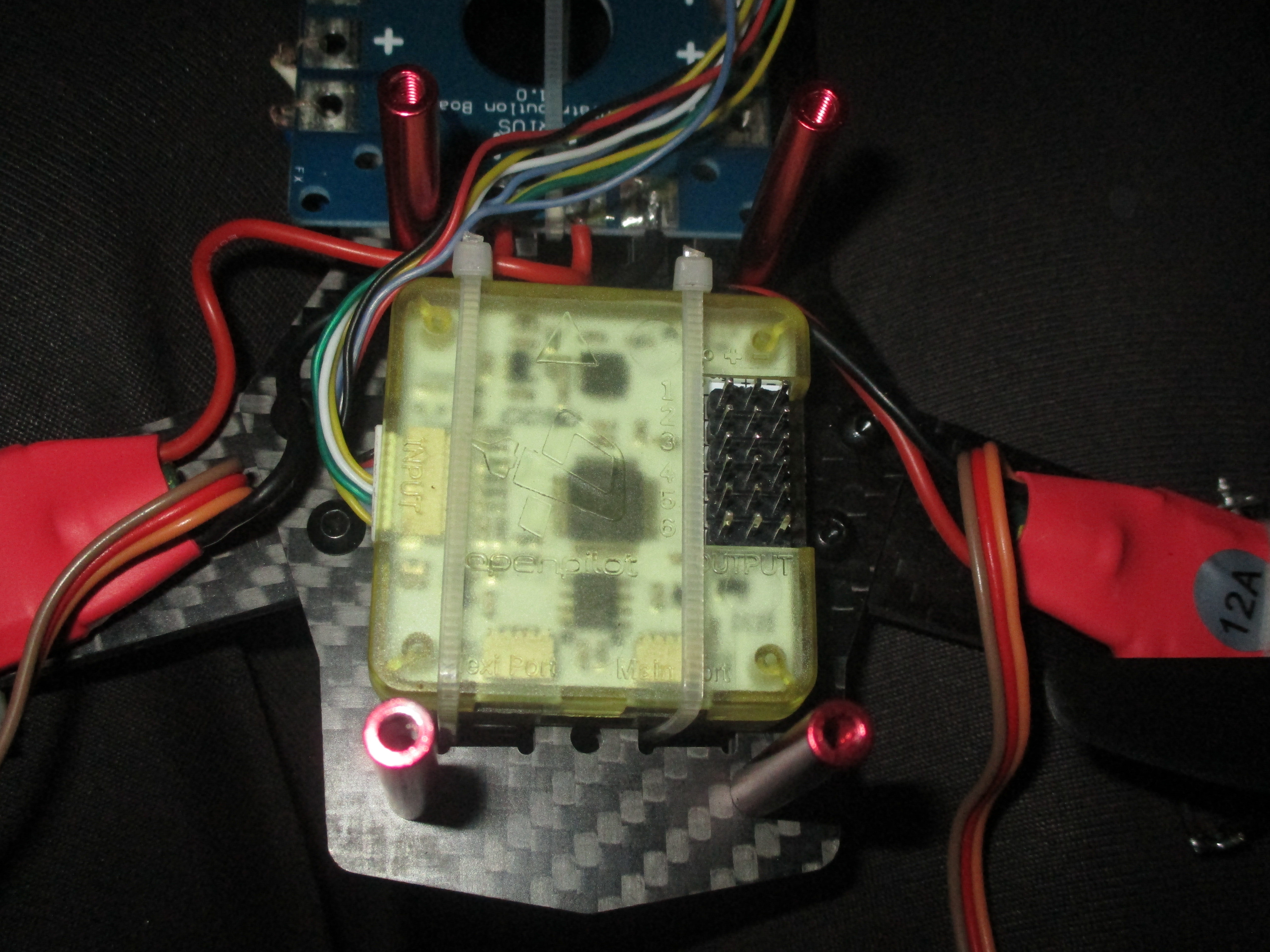
- Identification layer: The Revolution Flight Controller acts as a high-resolution spatial eye, measuring every point of the Euler angles (Roll/Pitch/Yaw) to coordinate the motor-thrust tasks.
- Conversion layer: The system uses high-speed PWM Pins to receive high-speed motor packets to coordinate mission-critical sensing tasks.
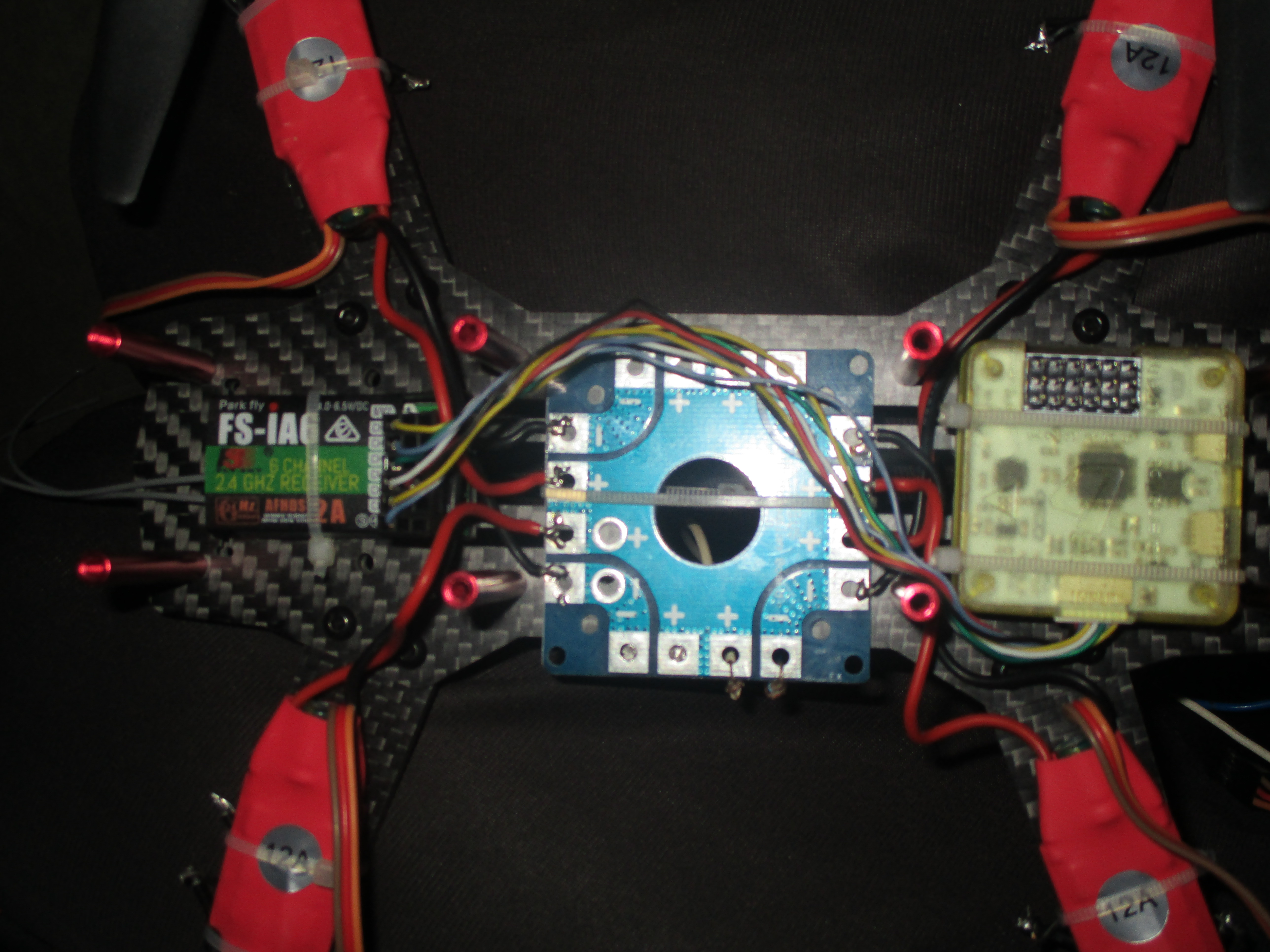
- Drone Interface layer: A 450mm X-Frame provides a high-definition visual and physical dashboard for your flight status check (e.g., Armed/Disarmed).
- Control Interface layer: High-speed 30A ESCs provide a manual thrust-override or autonomous status check during the initial calibration to coordinate status.
- Processing Logic layer: The Arduino code follows a "PID-control" (or motor-dispatch) strategy: it interprets gyro-data and matches motor-speeds to provide safe and rhythmic flight stabilization.
- Communication Dialogue Loop: Telemetry strings are sent rhythmically to the Serial Monitor during the initial calibration to coordinate status.
Hardware-Robotic Infrastructure
- OpenPilot Revolution: The "brain" of the project, managing multi-directional spatial sampling and coordinating ESC pulse sync.
- Arduino Uno: Providing a high-precision and reliable "Telemetry Link" for every point of the ground station.
- Brushless Motors: Providing a high-capacity and reliable physical interface for your first successful "Drone Mission."
- Li-Po Battery: Essential for providing a clear and energy-efficient power source for each flight pulse.
- Radio Transmitter: Provides a clear and professional physical interface for each of your kinetic missions and protects the internal components.
- Micro-USB Cable: Used to program your Arduino and flight controller via the system controller.
Making
The quadcopter control process is designed to be very efficient:
- Initialize Workspace: Correctly set your motors and ESCs inside your drone frame and connect your flight controller pins properly to the components.
- Setup Output Sync: In the OpenPilot GCS, initialize the
Stabilizationalgorithms and define the TX/RX channels to coordinate the radio signals. - Internal Dialogue Loop: The station constantly performs high-performance temporal checks and updates motor status in real-time based on your spatial settings.
- Visual and Data Feedback Integration: Watch your flight dashboard automatically become a rhythmic status signal, pulsing and following your spatial settings from a distance.




Future Expansion
- OLED Identity Dashboard Integration: Add a small OLED display on the drone frame to show "Local IP" or "Battery (%)."
- Multi-sensor Climate Sync Synchronization: Connect a specialized "GPS Module" to perform higher-precision "Auto-Level-Home" wirelessly via the cloud.
- Cloud Interface Registration Support Synchronization: Add a specialized web-dashboard on a smartphone over WiFi/BT to precisely track and log the total flight history.
- Advanced Velocity Profile Customization Support: Add specialized "Machine Learning (vCore)" to the code to allow triggers to be changed automatically based on the user height!
Quadcopter is a perfect project for any science enthusiast looking for a more interactive and engaging robotics tool!
[!CAUTION] The High-Speed Propellers are dangerous; always ensure you have an appropriate Kill-Switch through the radio and the props are removed during the internal calibration cycles!