About
A low-cost 12DOF quadruped, actuated by hobby servos. Notice that this is an early version developed back in 2019. If you're looking for a high-performance desktop quad, check out the ongoing Quadruped bai tiny
Check out This repository contains the models, BOM, electronic, simulate, as well as the source code of the project.
Videos
Balancing
Walking
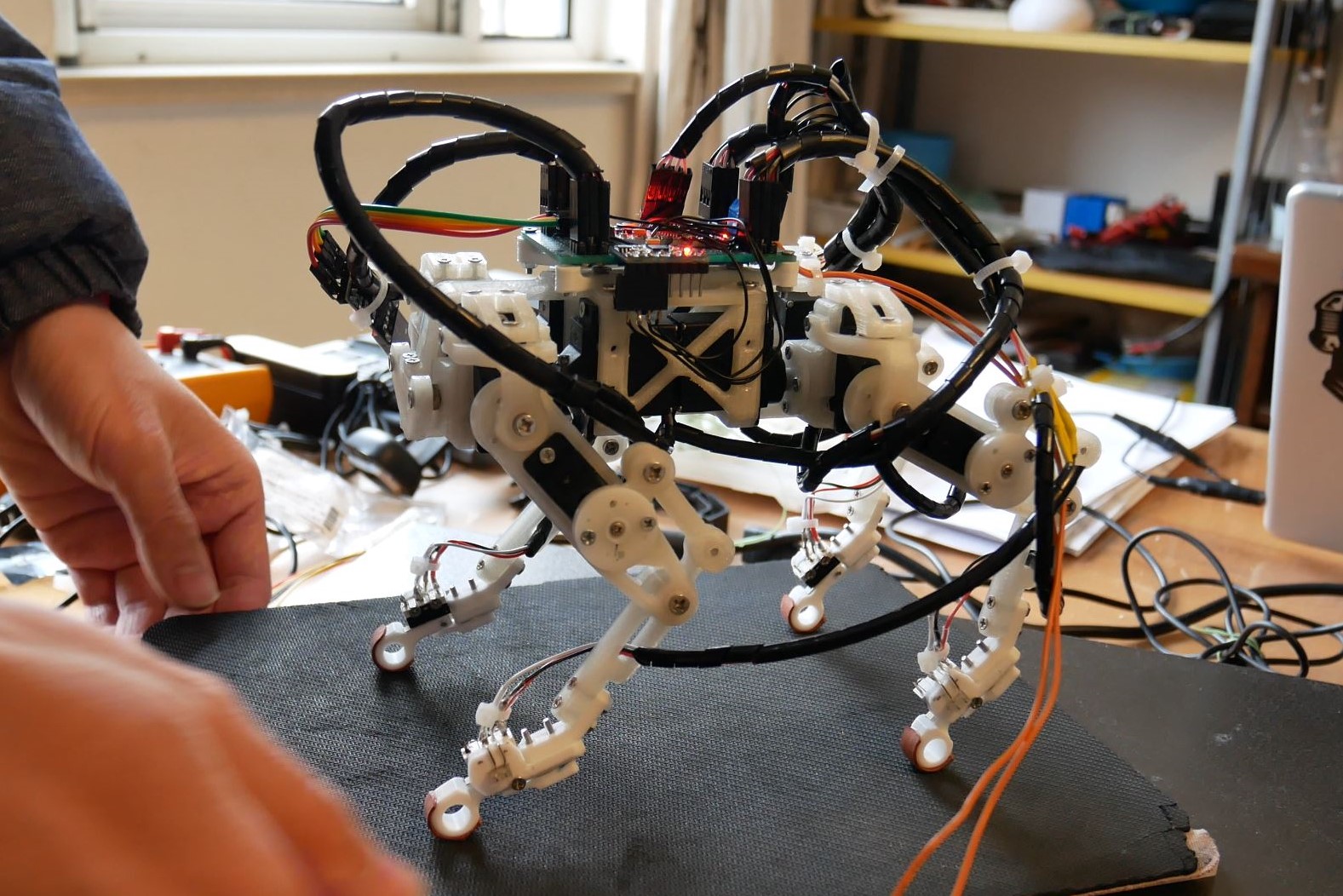
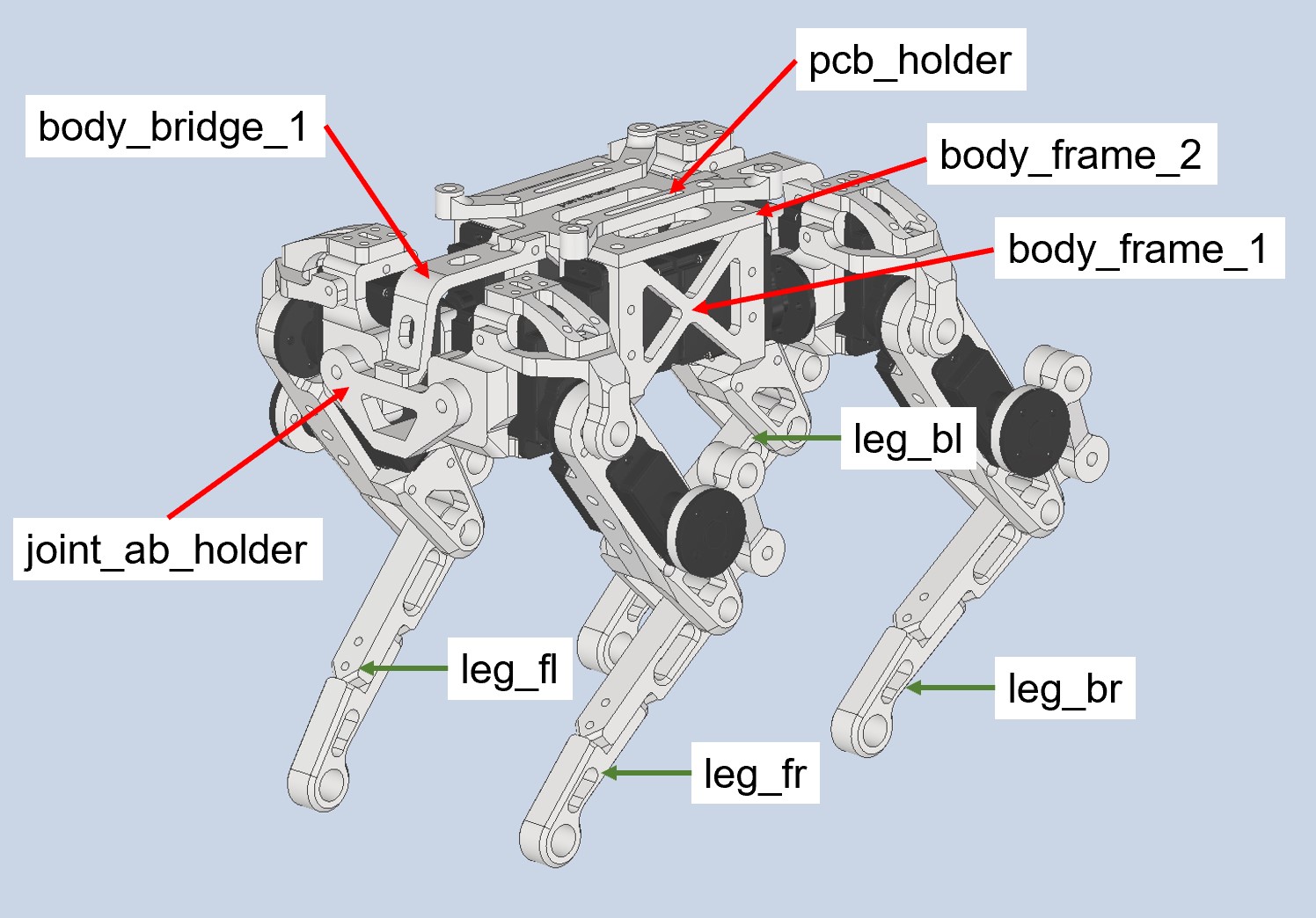
Body Assembly
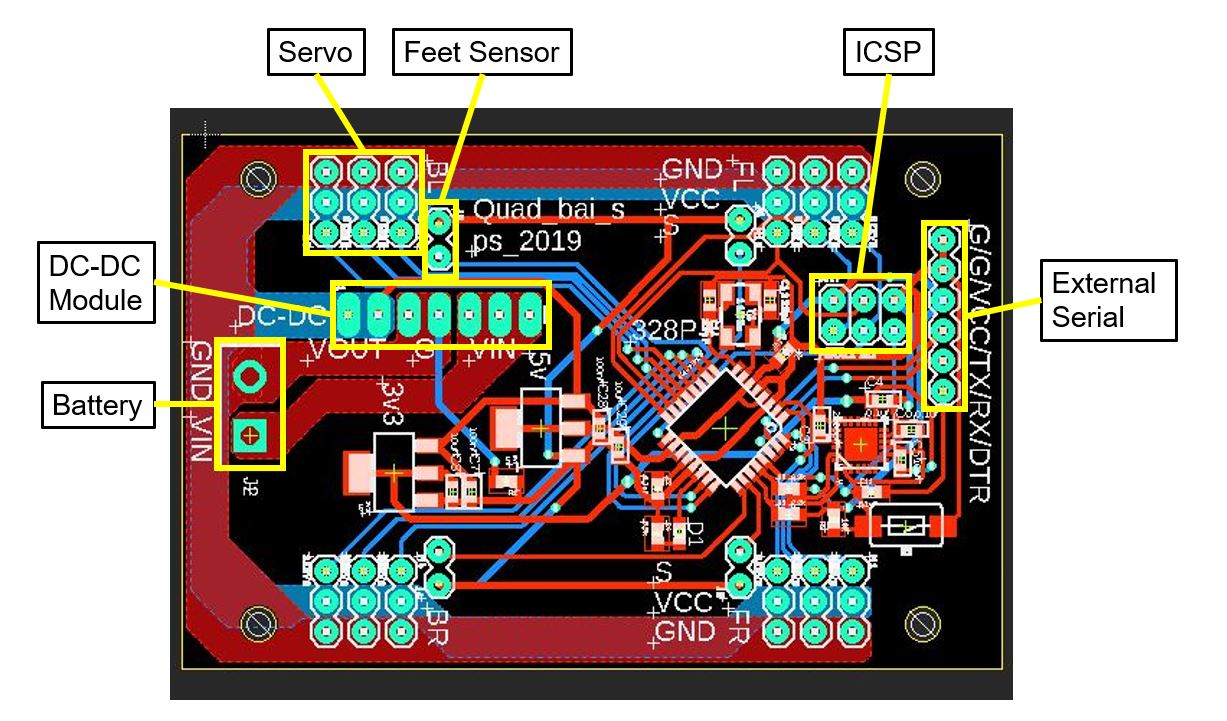
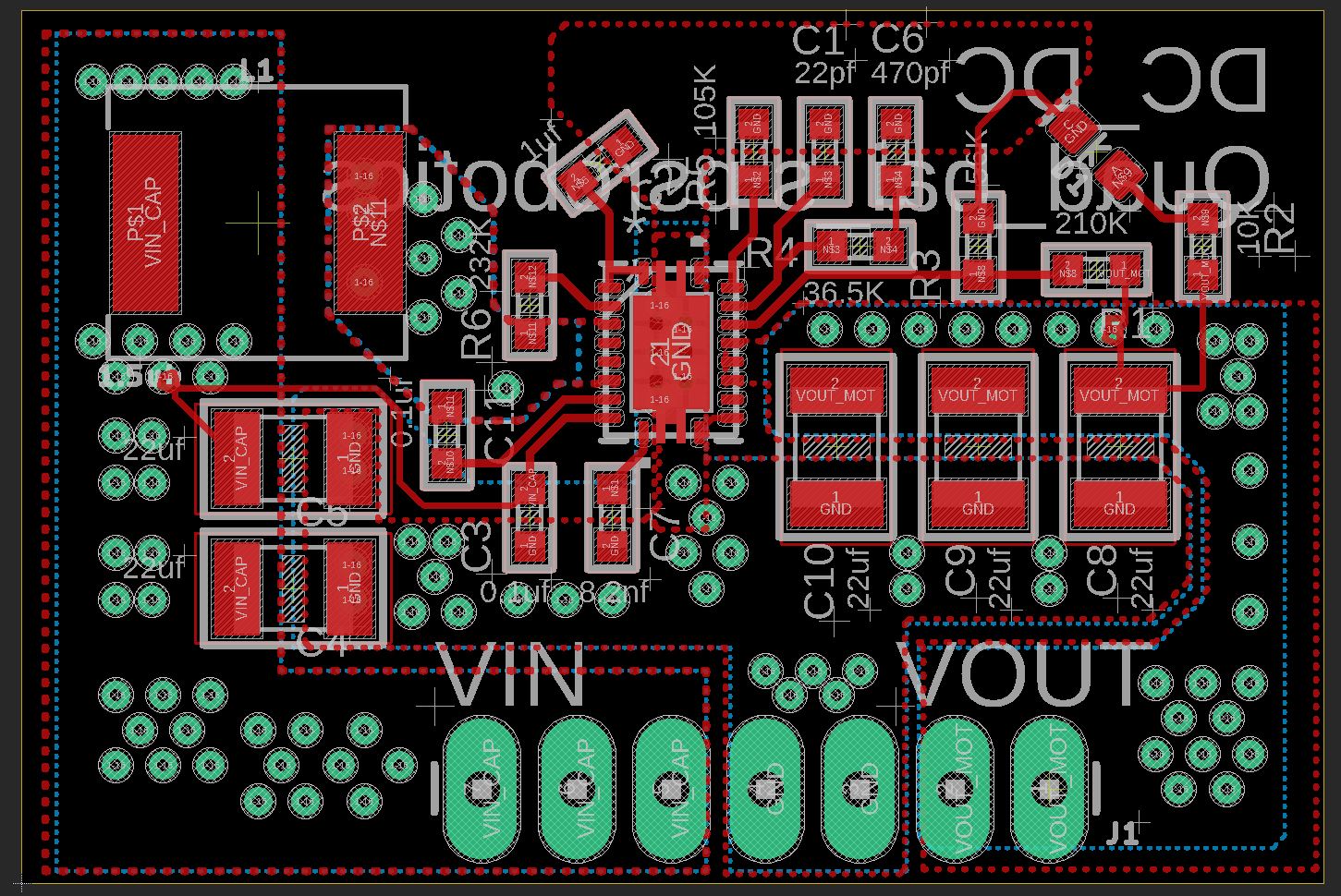
Electronic
Simulate
EXPANDED TECHNICAL DETAILS
Bionic Multi-Legged Locomotion
The Quadruped Bai is a four-legged robotic platform that explores the complex coordination required for stable, life-like animal movement.
- Servo Coordination Matrix: Managed by an Arduino (often with a PCA9685 I2C driver to save pins), the system controls 8 independent servos (2 per leg—knee and hip). The firmware uses a "Walking Gate" algorithm to maintain a stable center of gravity.
- Inverse Kinematics (IK) Basics: (Advanced version) The code calculates the exact joint angles required to move a foot to a specific X,Y coordinate, allowing the robot to walk on uneven surfaces or crouch smoothly.
Maneuverability
- Dynamic Balance: Includes code for several animations: "Walk," "Turn," "Wave," and "Crouch," providing a versatile foundation for more complex autonomous bionic projects.