Pseudocode:
- 2 stop commands: stops when there's an obstacle + stops when red button is pressed
- if either of these stop conditions is true: stop (walk backwards, reposition self)
- else: walk forward
- other functions: speed control (green speeds up, yellow slows down, red stops and resets speed to default)
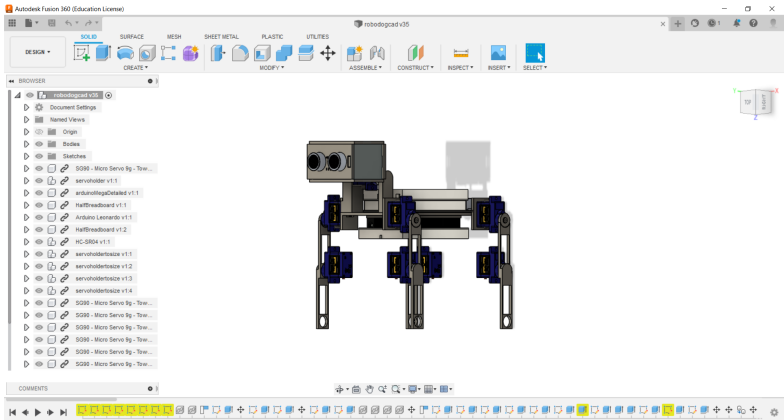
Multi-Legged Kinematics: Quadruped Robo Dog
A standard RC car relies on a simple DC motor to roll over physics. A Quadruped Robo Dog cannot roll. It must violently fight gravity in real-time. This project is a monumental achievement in the mathematics of Inverse Kinematics (IK), requiring an entire 16-channel I2C grid to command 8+ servos simultaneously in mesmerizing Sine-Wave walking gaits.
The Matrix of Inverse Kinematics (IK)
A dog does not move its hip independently of its knee. If the hip moves 10 degrees, the paw will swing in an arc. To keep the paw moving in a straight line flat across the floor, the knee must counter-rotate simultaneously using extreme trigonometry.
- The Arduino does not just send static angles like
servo.write(90). - It calculates the requested Cartesian coordinate for the foot
(X = 10, Y = 0, Z = -15). - The massively complicated C++
calculateIK()matrix utilizes the physical lengths of the femur and tibia (L1, L2), running them into absolutecos()andsin()functions! - The algorithm outputs the exact degrees the Hip and Knee must move to reach that exact mathematical coordinate without falling over!
The PCA9685 I2C Pulse Architect
An Arduino Uno cannot cleanly run 8 servos. The processor will crash, and the robot will collapse violently into a pile of plastic.
- You must offload the massive PWM pulsing to a dedicated PCA9685 16-Channel Servo Driver Board.
- The Uno communicates via the two I2C pins (
A4, A5). - It sends the high-level IK solutions via the
<Adafruit_PWMServoDriver.h>library! pwm.setPWM(leg1_Hip, 0, calculatedIKAngle);- The dedicated PCA chip handles the terrifying electrical pulsing independently, allowing the Uno to immediately start calculating the next millisecond of the walk cycle!
The Quadruped Industrial Setup
- Arduino Mega or ESP32 (The trigonometry calculations will utterly crush an Uno's memory architecture!).
- PCA9685 16-Channel PWM Module.
- 8 or 12 MG996R Heavy Metal Geared Servos (Plastic SG90s will instantly snap attempting to lift a 2KG plastic robot).
- A 3D-Printer (Crucial to fabricate the mathematically precise femur and tibia lengths for the IK equations to function).
- A massive Step-Down Buck Converter (e.g., 20 Amp) to safely drop a 3S LiPo battery down to 6.0V. Bypassing this will blow up every servo on the chassis instantly.