PURPOSE
The purpose of our creation is to detect whether a cave is safe to enter without human intervention in a completely automated, cheap, easy to use and potable way. Nowadays, people use handheld sensors which can put their lives at risk. This machine has the potential to act as a 'library of sensors on wheels'.
MERITS
- It lets cave explorers know when methane pumping is required.
- It lets us know when miners must wear oxygen mask.
- It has a relative compact size, is very easy to use.
- It doesn’t require any fossil fuels and thus is eco friendly
- It doesn’t need any controller other than an android phone.
- It reduces the dependency of cave explorers on precious human resource.
- It lets cave explorers know when methane pumping is required.
LIST OF MATERIALS
- Arduino UNO R3 ( Microprocessor )
- Mini Bread Board ( Circuit )
- Li - ION Battery ( Power supply 3.7V )
- 4WD Chassis ( Structure )
- MQ5 ( LPG, Natural gas, Methane )
- MQ135 ( Smoke, Dust, Alcohol )
- DHT22 ( Temperature and Humidity )
- HC-SR04 (Proximity )
- HC-05 ( Bluetooth Module )
- Jumper Wires (Connection )
- L298N (Dual H-bridge/Motor Driver)
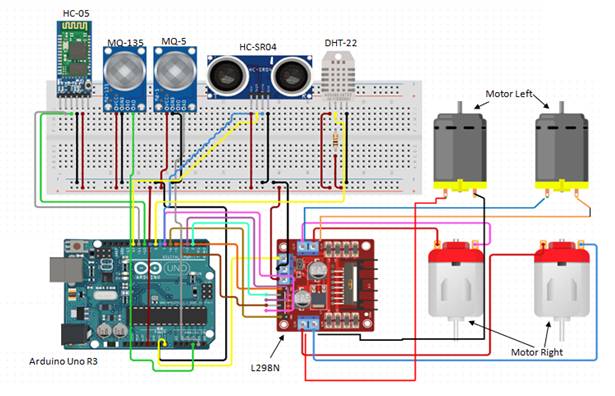
DIAGRAM
PROCEDURE
- First assemble or make a chassis of the object you are building.
- Then glue all electronic items on the chassis.
- Then wire all the electronics using the software representation with a breadboard
- Then hook your configuration to the power supply through the motor driver.
EXPANDED TECHNICAL DETAILS
Rugged Subterranean Navigation Hub
This heavy-duty robotic rover is designed to explore dark and cramped cave environments where humans cannot safely enter.
- High-Power LED Illumination Array: The Arduino manages a bank of high-brightness LEDs. The firmware includes an "Auto-Focus" lighting routine, brightening the LEDs when the front ultrasonic sensors detect an open space.
- L298N Differential Drive Kernel: Manages four high-torque geared motors. The rover uses a "Tank-Drive" logic, allowing it to rotate in place (zero-turn radius) to navigate tight cave passages.
Performance
- Remote Telemetry Backup: Optimized for long-range RF control. If the wireless link is lost, the Arduino enters a "Return Home" mode, reversing its movements based on its internal log to exit the cave entrance.