Hand sanitizers are placed not only on the streets but also in public places as the Covid-19 becomes popular. However, the hand sanitizer was touched by many people and thought it was not hygienic, so I started this project.
Project Overview
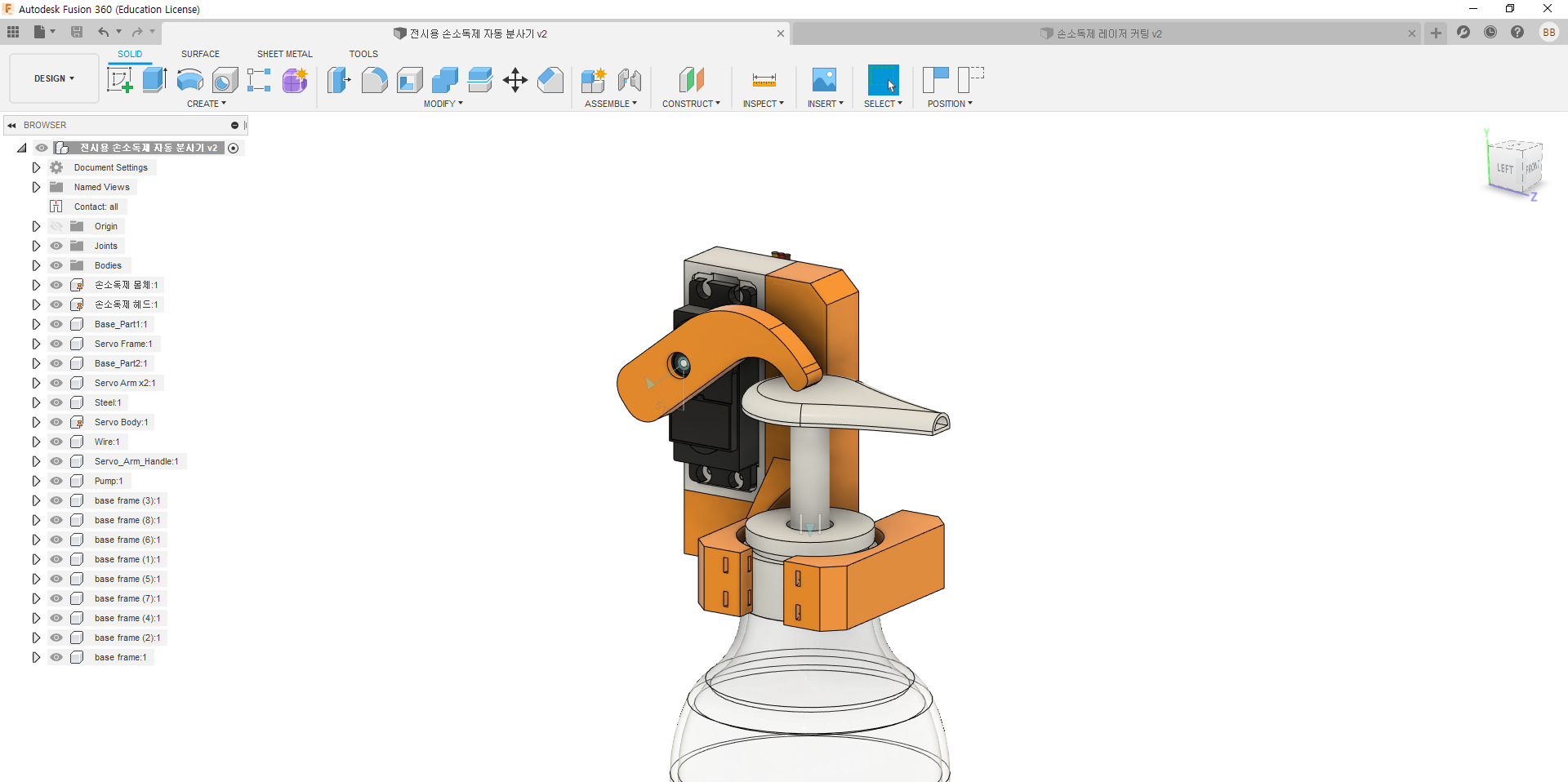
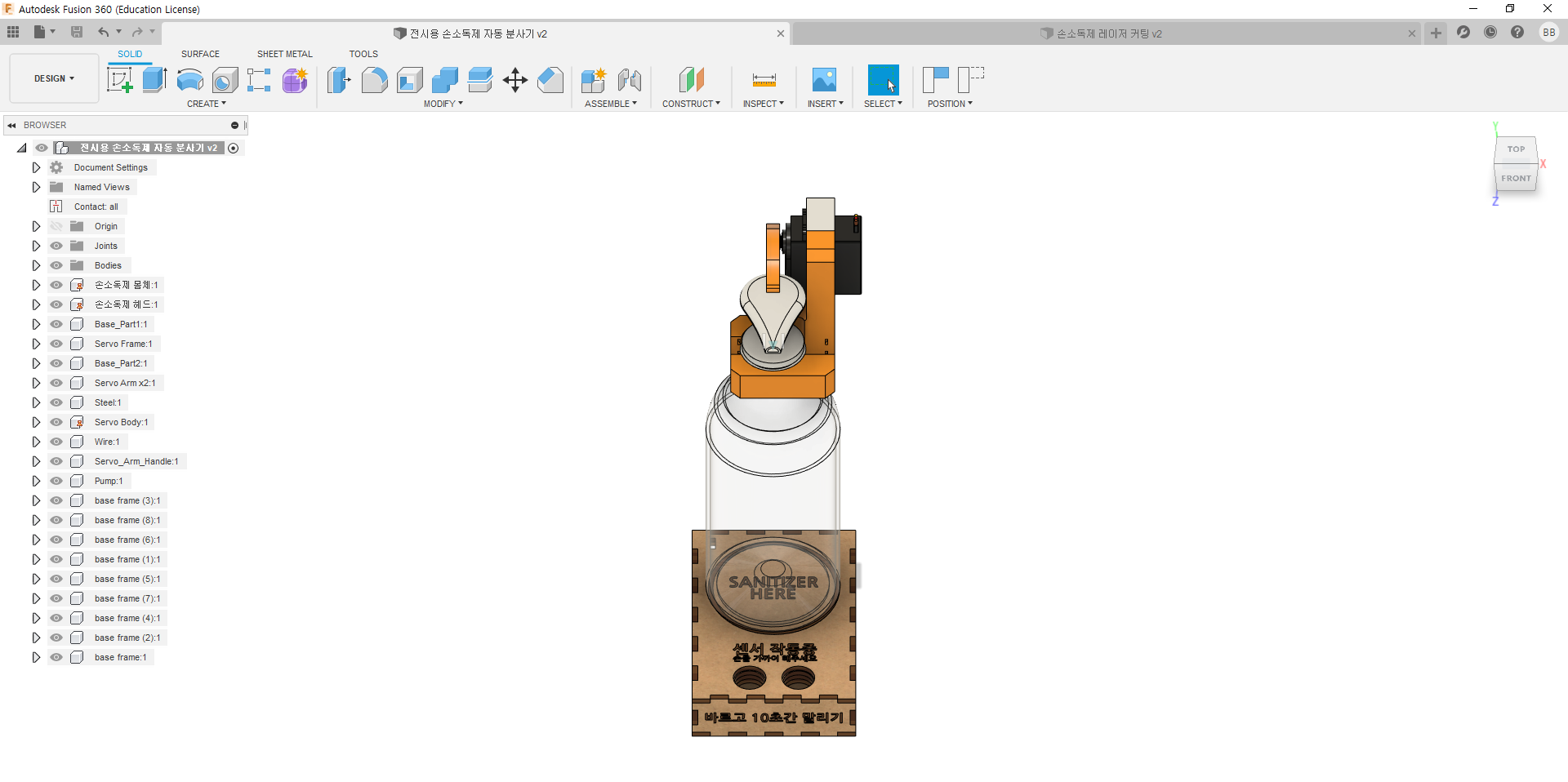
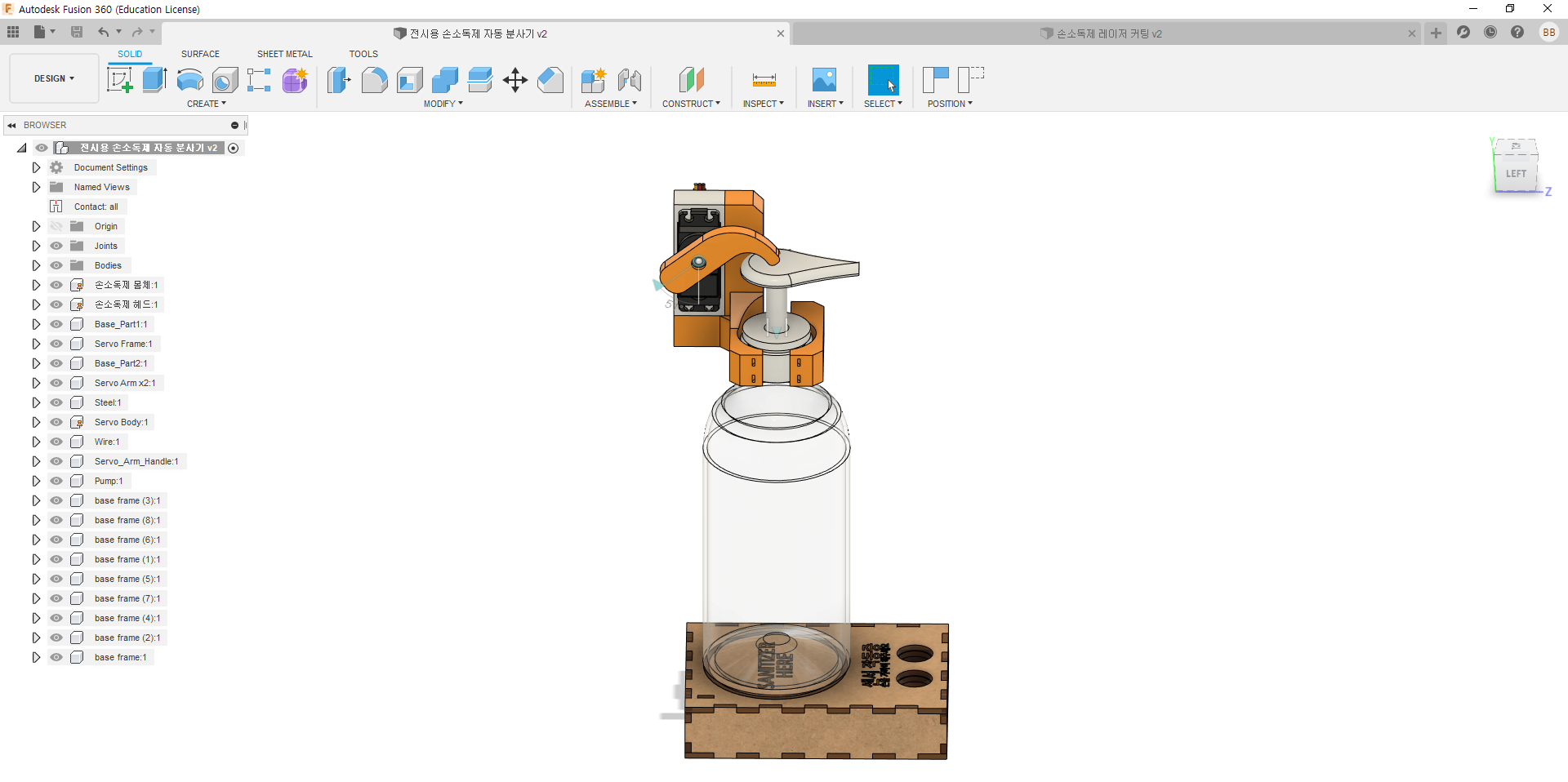
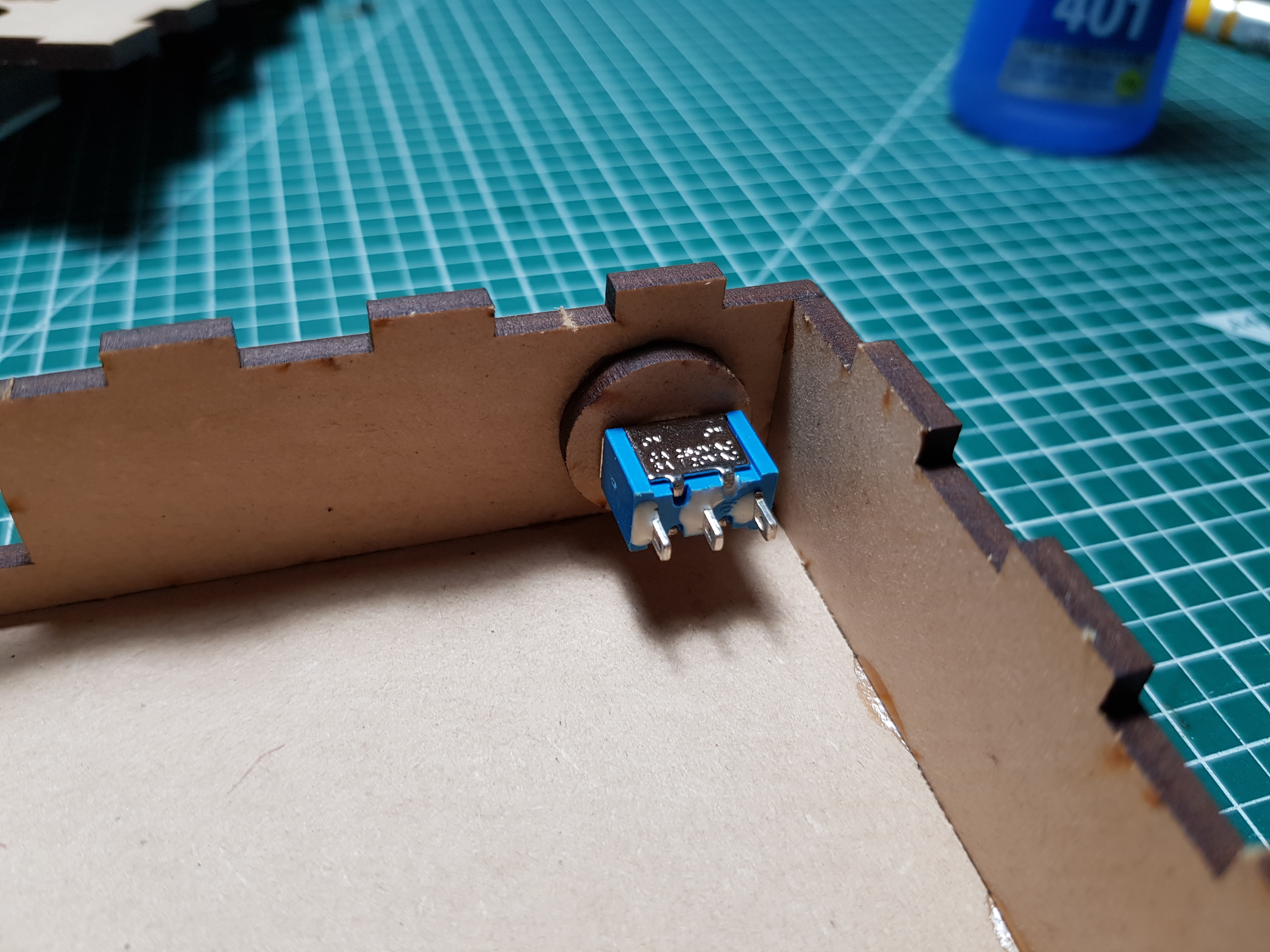
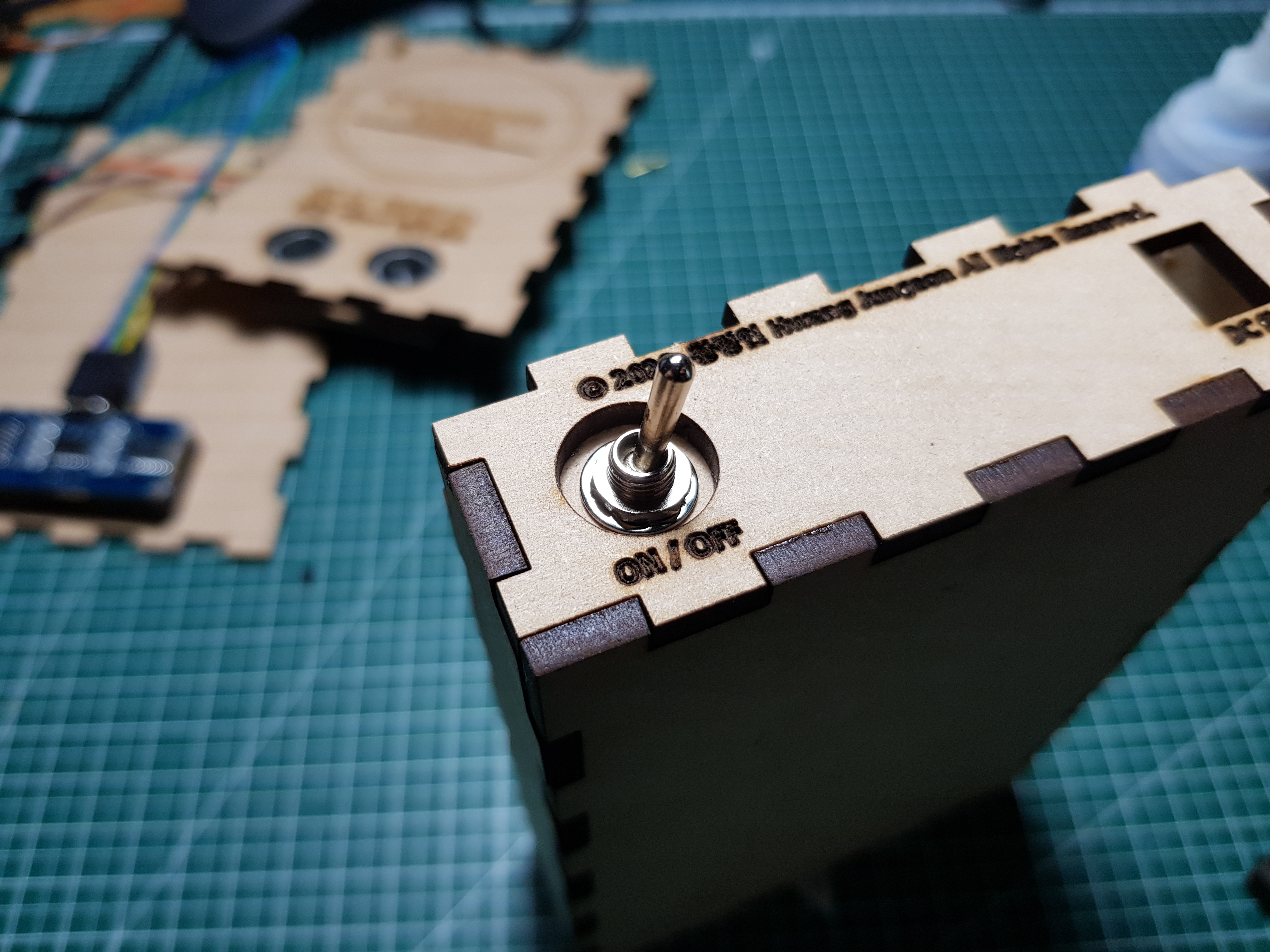
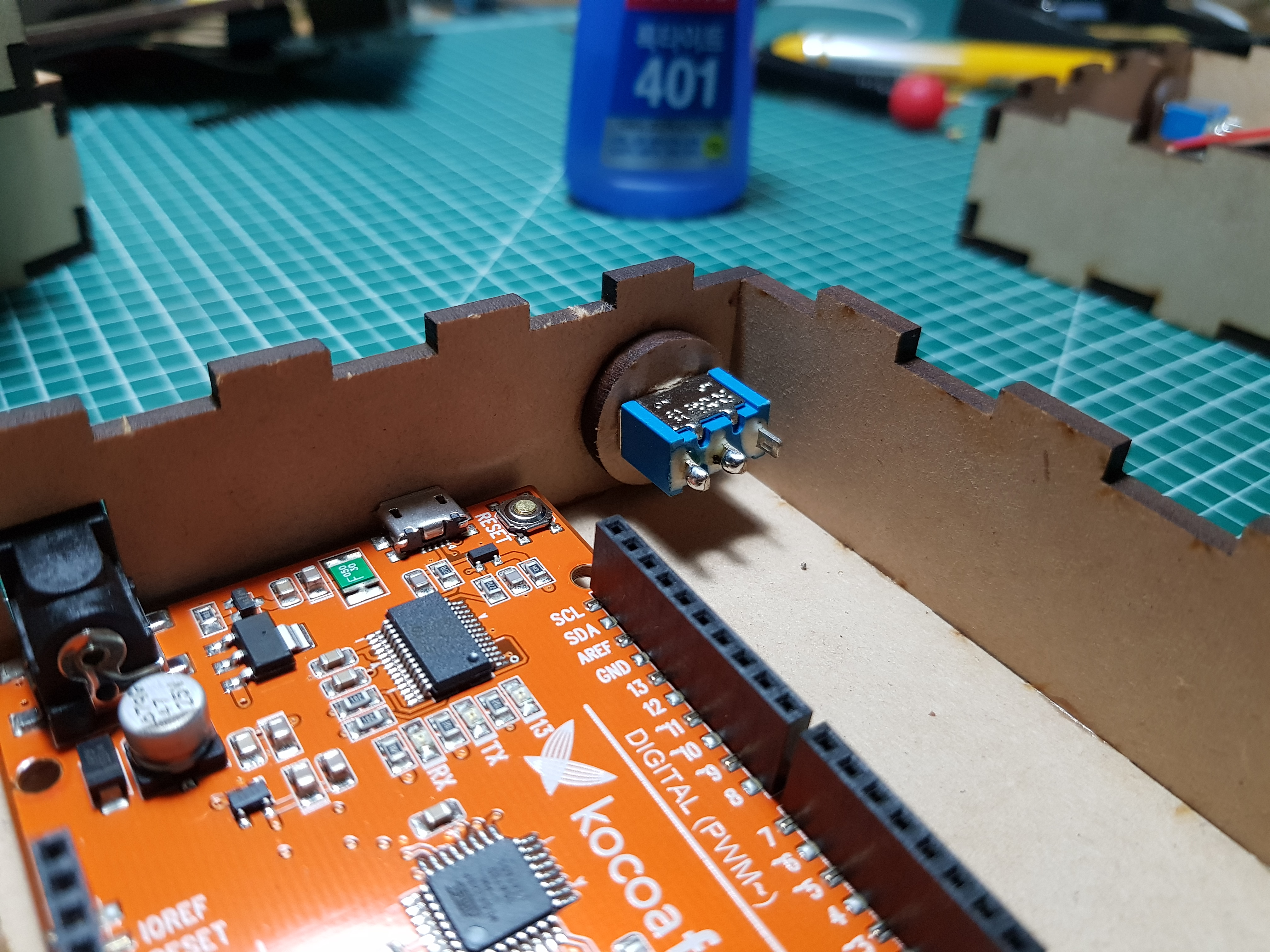
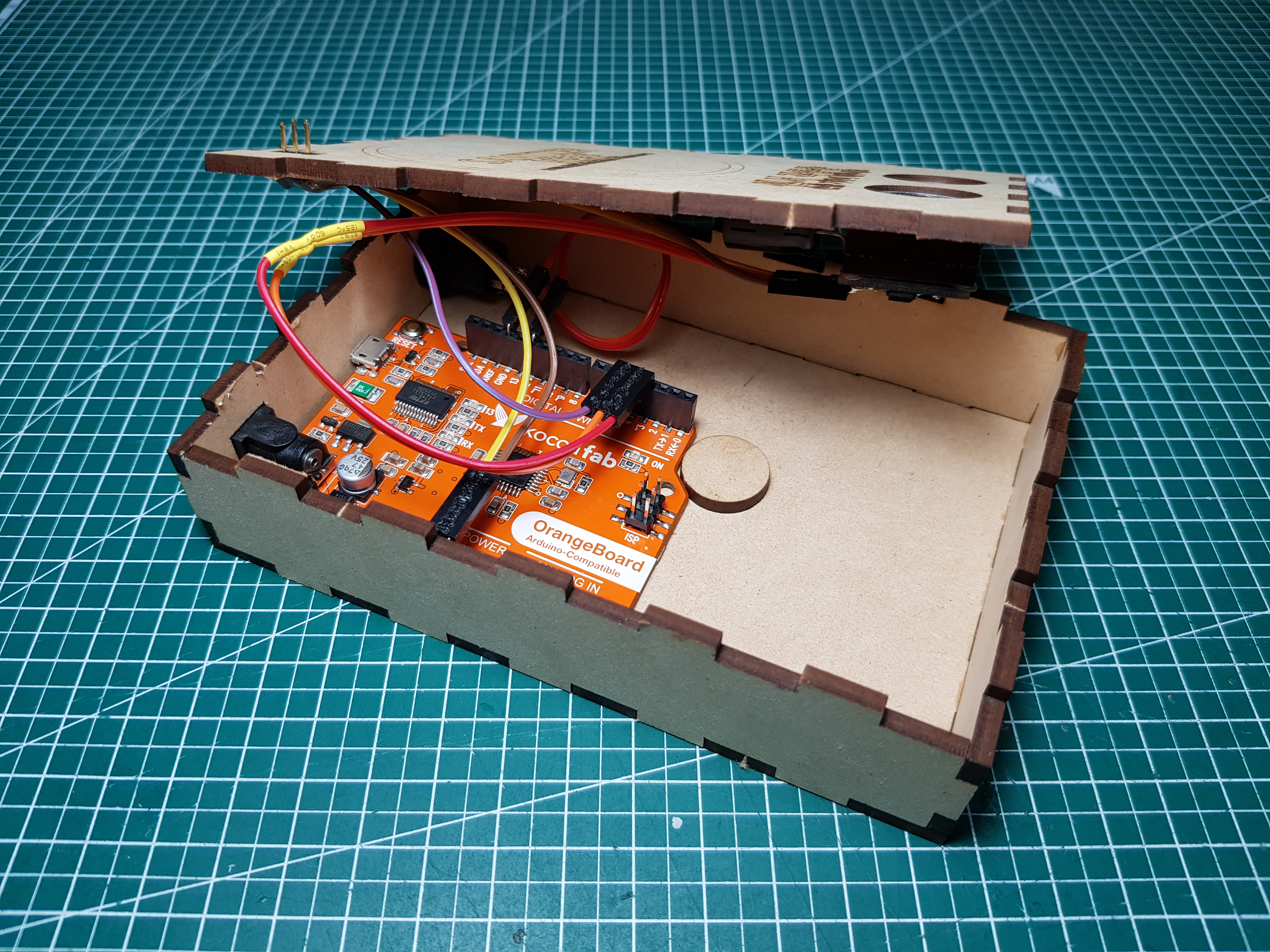
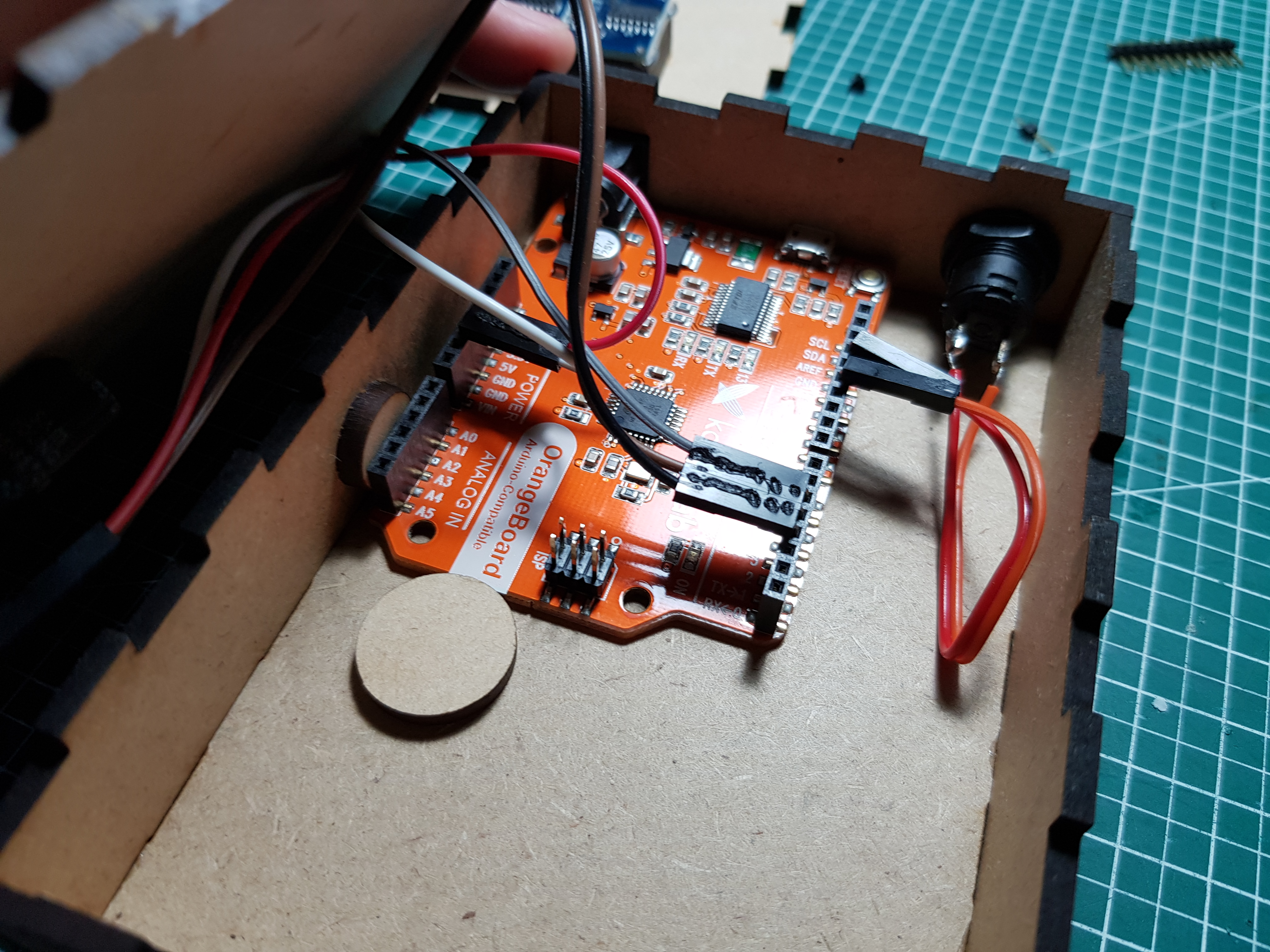
The "Sanit-Bot Actuator" is a mechanical automation project designed to retrofit standard manual pump bottles with hands-free electronic control. By using an MG996R high-torque servo, the system provides the physical force required to depress industrial-strength sanitizer pumps, while an HC-SR04 ultrasonic sensor handles user detection. This project is an excellent study in high-current power decoupling, lever-arm mechanics, and robotic enclosure design, combining laser-cut structural elements with 3D-printed mounting brackets.
Technical Deep-Dive
- High-Torque Actuation (MG996R):
- Torque vs. Force: Standard sanitizer pumps require a considerable amount of force ($F$) to overcome internal spring tension. The MG996R motor provides up to 11.0 kg-cm of torque—nearly 10 times that of the common SG90 servo—allowing it to easily depress even large bulk-sanitizer containers.
- The Lever Principle: The 3D-printed actuator arm acts as a simple machine. By adjusting the length of the arm, the project manages the trade-off between the depth of the "press" and the speed of the actuation.
- Power Rail Decoupling (The 1000µF Capacitor):
- Inductive Inrush Current: High-torque servos can draw over 1.5 Amps during stall or initial startup. This sudden demand can cause the Arduino's 5V rail to "sag," leading to processor brownouts and random resets.
- Charge Reservoir: This project utilizes a 1000µF Electrolytic Capacitor placed across the VCC and GND lines. This acts as a high-speed energy reservoir, providing the necessary "burst" of current to the motor and smoothing out voltage spikes to keep the logic circuit stable.
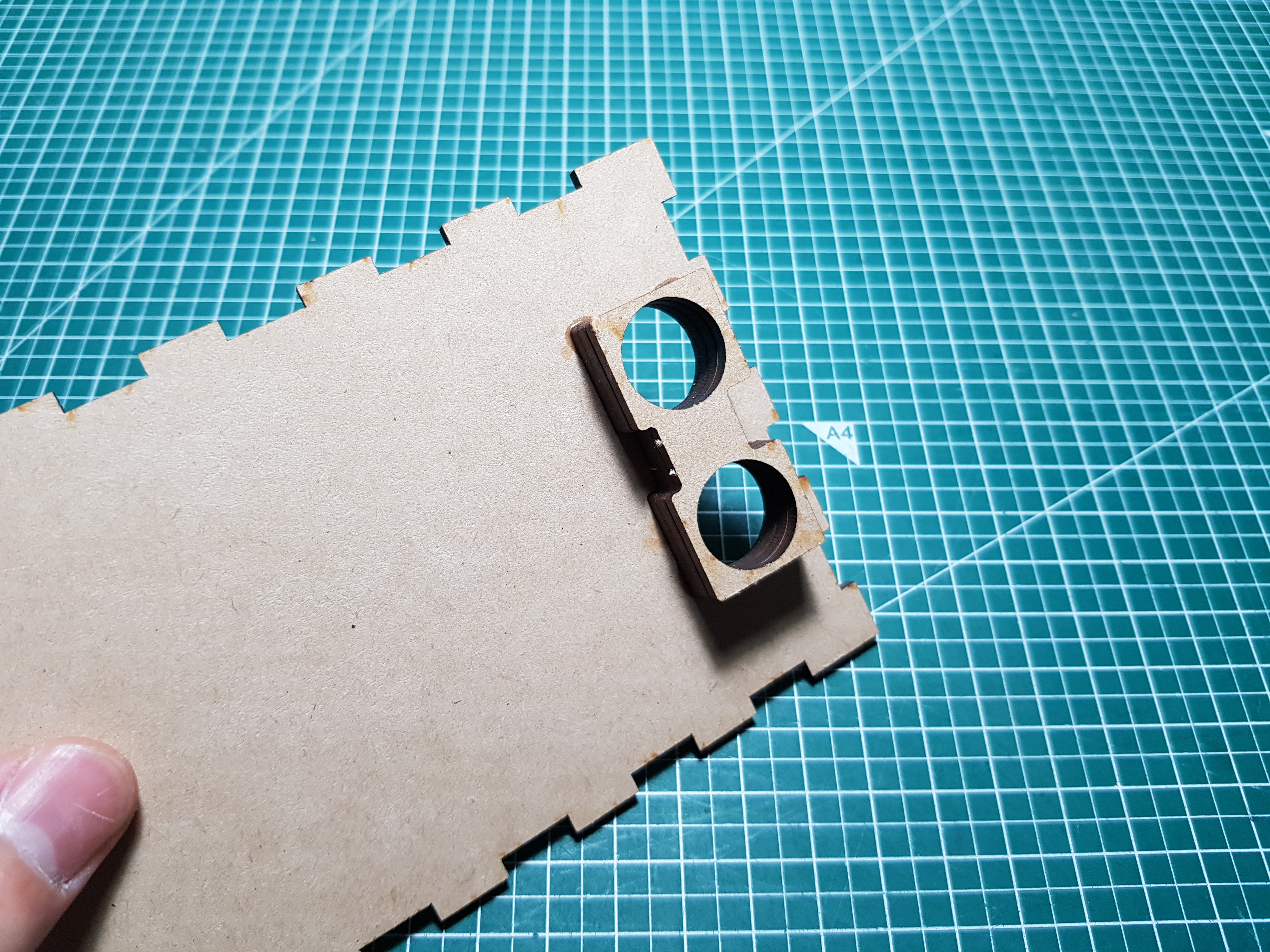
- Ultrasonic Noise Filtering:
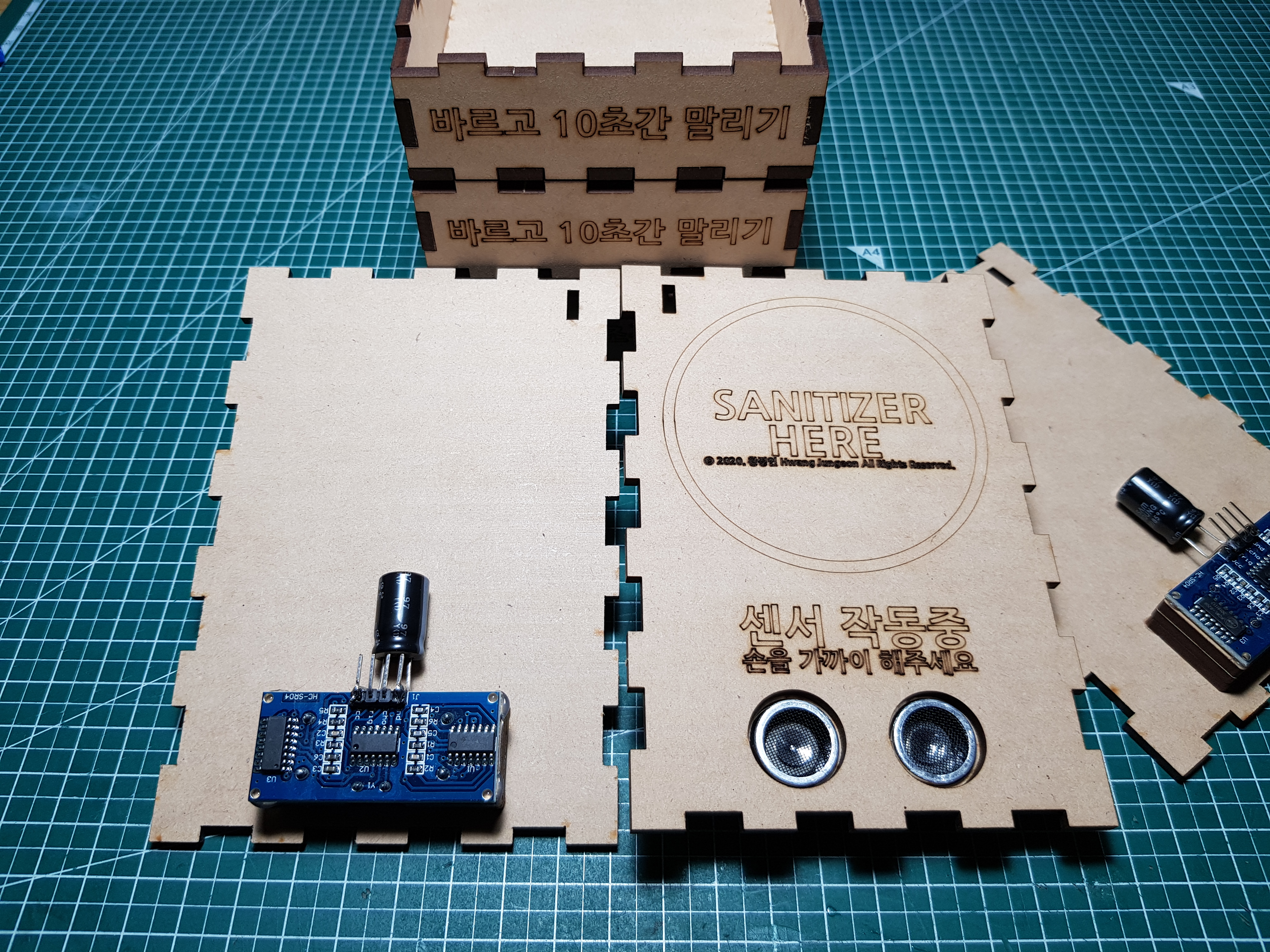
- Environmental noise can cause ultrasonic sensors to occasionally report a "0" or a false "Far" distance. The firmware implements a Rolling Average or a simple threshold check (e.g., only trigger if distance is < 15cm for 3 consecutive cycles) to ensure the pump only activates when a hand is intentionally placed in the dispenser area.
- Thermal & Mechanical Strain Relief:
- The code includes a specific "Detaching" logic. After the pump is depressed, the servo is returned to its neutral position and the
servo.detach()command can be used to stop the PWM signal, preventing the motor from "humming" or overheating while waiting for the next user.
- The code includes a specific "Detaching" logic. After the pump is depressed, the servo is returned to its neutral position and the
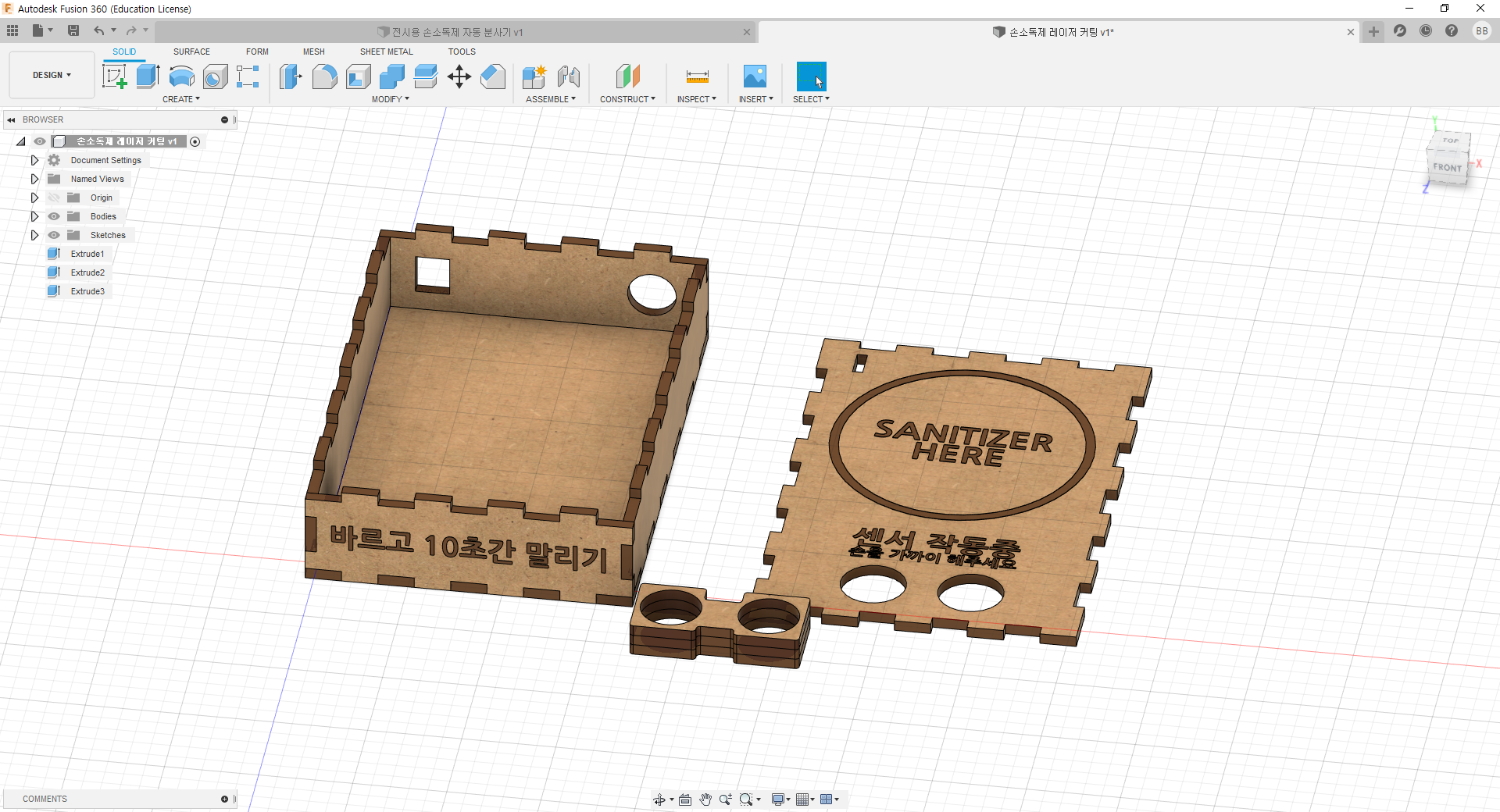
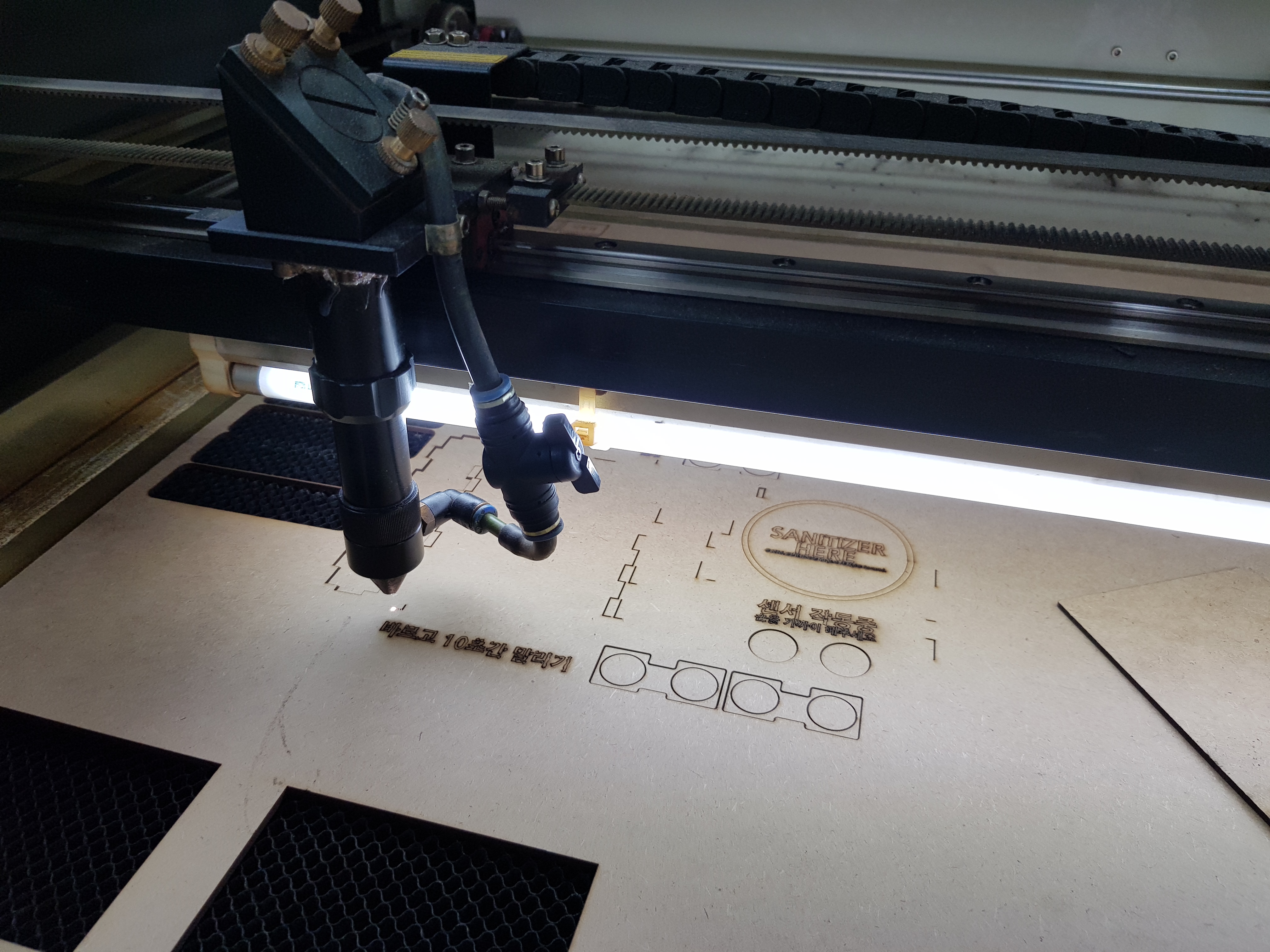
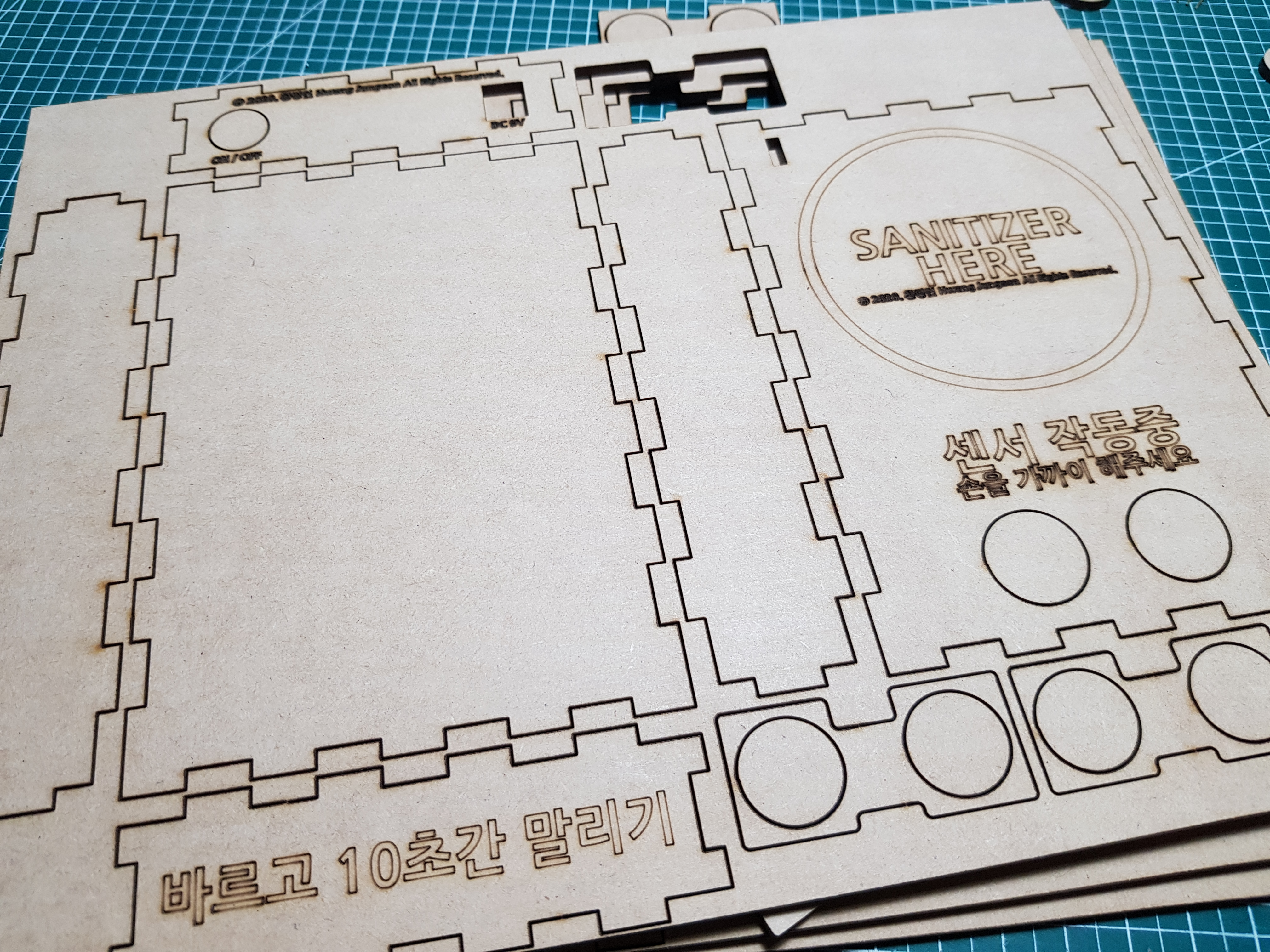
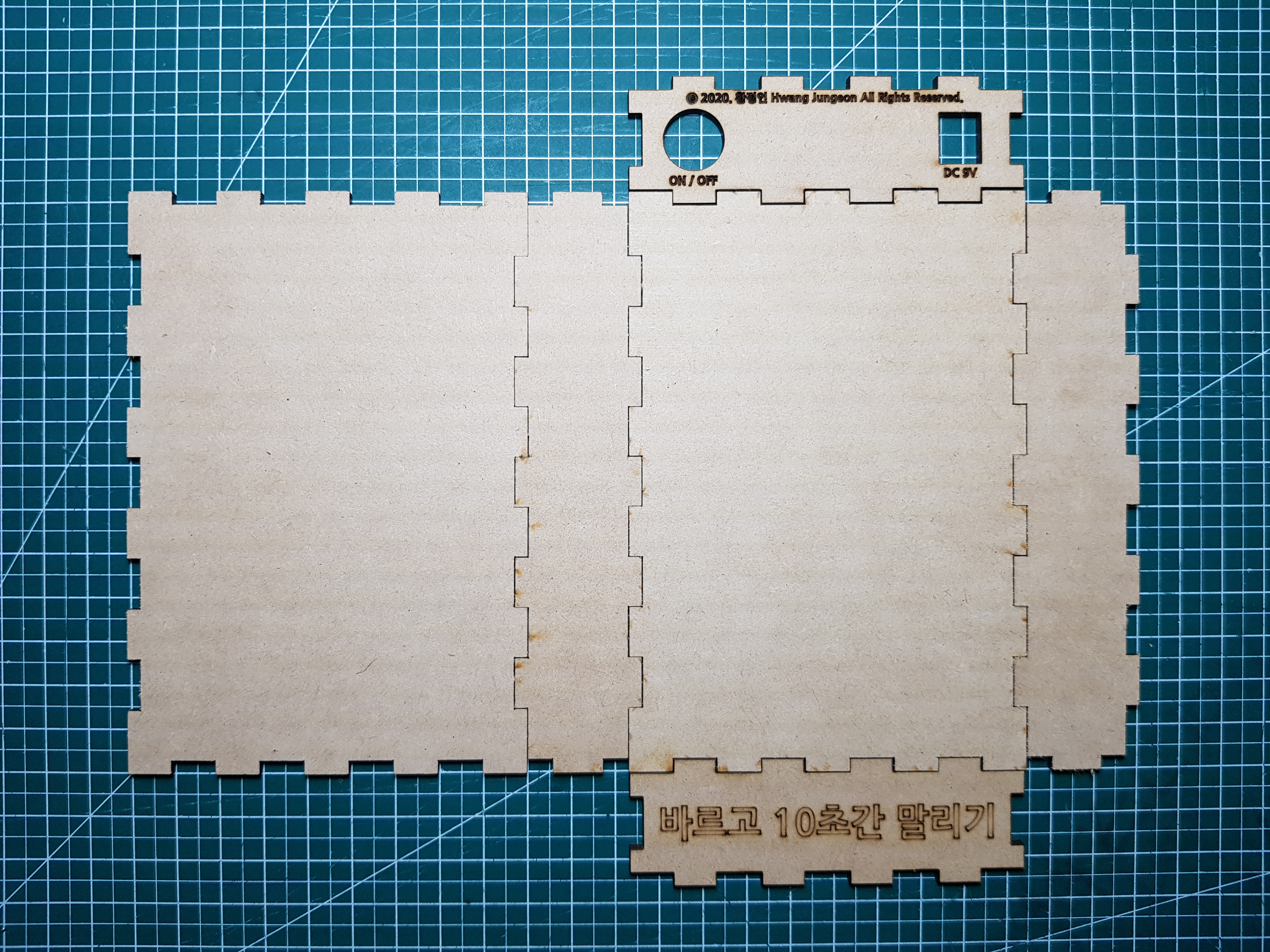
Engineering & Prototyping
- Hybrid Manufacturing: The project utilizes Laser Cutting for the main structural chassis (acrylic or plywood) for rigid load-bearing, while using 3D Printing for the complex geometries like the sensor mounts and the pump-head adapter.
- Calibrated Stroke Length: Every sanitizer bottle has a different "travel distance." The Arduino code is designed with adjustable constant variables, allowing the user to fine-tune the minimum and maximum servo angles to match the specific bottle height and spring resistance.
- Status Indicators: The hardware layout includes a visual path for the ultrasonic LEDs, and future expansions suggest adding an "Empty Bottle" alert based on the number of cumulative pump cycles recorded in the Arduino’s EEPROM.
- Safety & Compliance: By eliminating the "contact point" shared by hundreds of users in public spaces, this device acts as a meaningful hardware-level barrier against cross-contamination, making it a valuable installation for schools and offices.

Automate hygiene with high-torque precision—bringing mechanical intelligence to pandemic prevention.