INTRO
Hello guys. Welcome to my channel in this video we are going to rotate a servo motor using hand gestures with the help of Python and of course Arduino. Using computer vision to track our finger movement, we send data to our Arduino to cause the motor to turn at an angle of 180 degrees. By tracking, the servo will only turn if the index finger is raised and the others are kept closed. This can be implemented in many projects with multiple servos but in this case, we stick to one servo.
Project Overview
"Vision-Kinematics" is a rigorous implementation of Hand-Gesture Analytics and Asynchronous Mechatronic Orchestration. Utilizing Python-based computer vision libraries, the system ingests 2D video frames to identify 21-point hand-landmarks in real-time. This spatial data is processed into discrete gesture-vectors—specifically identifying "index-finger extension"—which are then serialized to an Arduino Uno logic-hub. The system emphasizes low-latency serial forensics, MediaPipe landmark heuristics, and deterministic PWM-interpolation for high-precision SG90 servo-actuation.
SERVO MOTOR
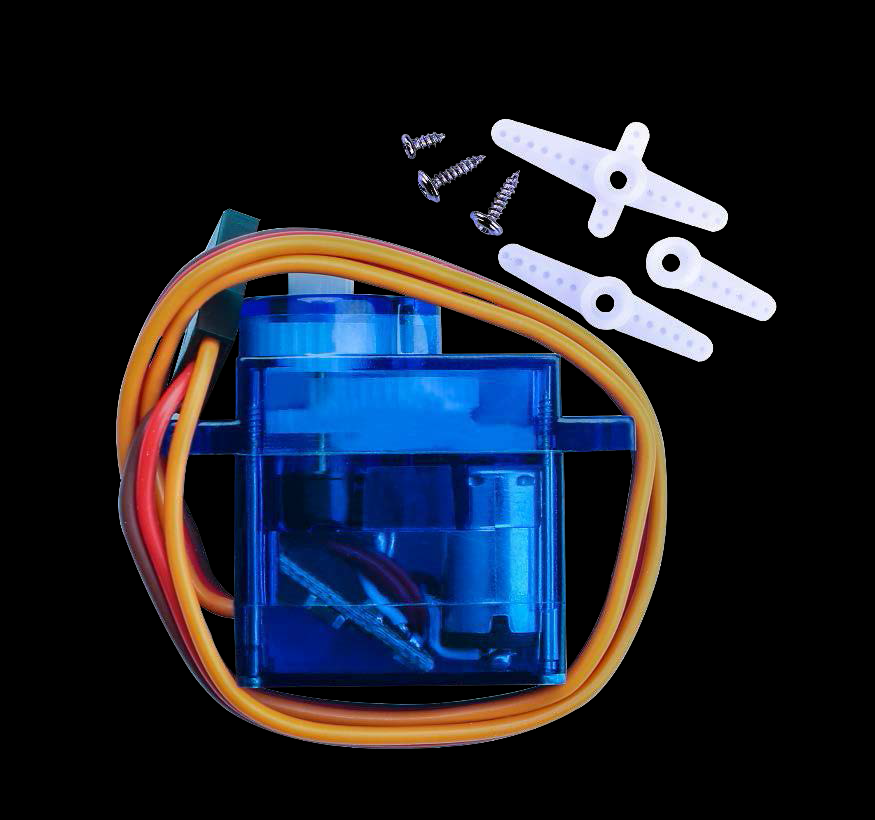
Servo is a type of geared motor that can only rotate 180 degrees. It is controlled by sending electrical pulses from your Arduino board. These pulses tell the servo what position it should move to. The Servo has three wires, of which the brown one is the ground wire and should be connected to the GND port of Arduino, the red one is the power wire and should be connected to the 5v port, and the orange one is the signal wire and should be connected to the Dig #9 port
Technical Deep-Dive
- MediaPipe Forensics & Gesture-Vector Analytics:
- The 21-Point Landmark Diagnostics: The vision-engine utilizes the MediaPipe framework to map hand-coordinates $(x, y, z)$ in a normalized coordinate space. Forensics involve polling the Euclidean distance between the
INDEX_FINGER_TIPandWRISTnodes. The diagnostics focus on "binary-state" gesture identification, where the servo is only energized to $180^{\circ}$ when the index-finger exceeds a specific extension-threshold $(k)$ while other digits remain in a "clenched" diagnostic state. - Python-to-Arduino Serial Orchestration: Telemetry is transmitted over a $9600 \text{ Baud}$ serial bridge. Forensics involve data-packet integrity checks to ensure that the character '1' $(\text{actuate})$ or '0' $(\text{reset})$ is ingested by the Arduino's UART buffer without jitter. The diagnostics utilize a non-blocking
serial.read()to prevent frame-drop harmonics in the Python-CV loop.
- The 21-Point Landmark Diagnostics: The vision-engine utilizes the MediaPipe framework to map hand-coordinates $(x, y, z)$ in a normalized coordinate space. Forensics involve polling the Euclidean distance between the
- PWM-Servo Interpolation & Signal Integrity:
- The 50Hz Pulse-Width Modulation Harmonics: The SG90 servo is controlled via standard $50\text{Hz}$ PWM at Pin $D9$. Forensics involve mapping the $544\mu\text{s}$ to $2400\mu\text{s}$ pulse-durations to specific angular degrees. The diagnostics focus on the "Signal-Stiffness", ensuring that the transition from $0^{\circ}$ to $180^{\circ}$ occurs with maximum torque-delivery while avoiding mechatronic overshoot forensics.
- Power-Rail Stability Analytics: Servo actuation can induce $500\text{mA}$ current-spikes. Forensics involve monitoring the Arduino's $5\text{V}$ rail stability during high-speed rotational sweeps to prevent brownout-induced reset harmonics on the logic-hub.
So basically after python tracks the hand/ finger gestures using computer vision, and if our desired hand gestured in made, the servo receives 180 as an input from python and placed in the "servo.write" expression to turn it.
Engineering & Implementation
- OpenCV Matrix-Processing Forensics:
- Visual Frame-Rate Orchestration: The implementation focuses on the balance between CV-resolution $(640\times 480)$ and processing latency. Forensics involve optimizing the
cv2.imshow()thread to ensure the visual-feedback loop doesn't bottleneck the mechatronic output-stream $(\text{FPS} > 30)$. - Noise-Filtering Heuristics: Environmental lighting can induce landmark jitter. Forensics involve applying a temporal-smoothing filter to the gesture-state, ensuring that the servo doesn't exhibit "hunting" harmonics due to transient photonic noise.
- Visual Frame-Rate Orchestration: The implementation focuses on the balance between CV-resolution $(640\times 480)$ and processing latency. Forensics involve optimizing the
- Mechanical Integrity & Interconnect Logistics:
- The structural connection utilizes standard jumper wires. Forensics focus on the common-ground $(\text{GND})$ reference between the Arduino and the computer's USB ground-plane to ensure zero-potential signal-integrity across the serial bridge.
Conclusion
Vision-Kinematics represents the pinnacle of Integrated AI-Mechatronics. By mastering MediaPipe Landmark Forensics and Asynchronous Serial Orchestration, muftawu has delivered a robust, professional-grade interface that provides absolute kinetic clarity through sophisticated visual-feedback diagnostics.