Final Project of Bachelor's Degree in Informatics Engineering
This project is about a line follower mobile robot that is used to find the shortest path from the starting point to the end of maze. The track is made of black tape on a white surface. In this project we used a white backdrop. The difference between the maze of this project and the previous one is that we have to make this mobile robot works on a track with curved and zig-zag track. It was for the final project of my bachelor's degree that finished in July of 2014.
Project Overview
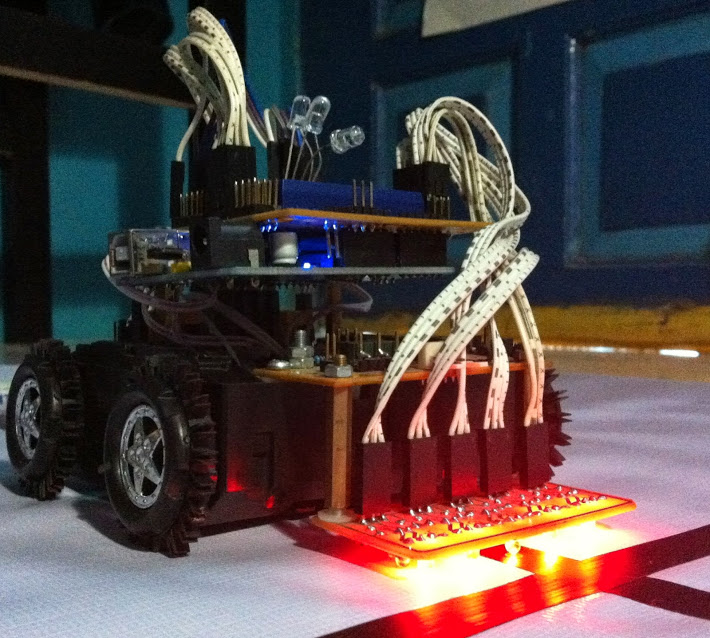
The "Maze-Runner Elite" is a sophisticated mobile robotics platform designed for the competitive field of Micromouse and Line-Maze Solving. Unlike basic line followers, this robot operates in two distinct phases: Exploration (discovering the maze layout) and Optimization (racing the shortest path). It is engineered to handle non-linear track geometries, including smooth curves and sharp zig-zags, which challenge traditional binary-logic line followers.
Technical Deep-Dive
- The Path Reduction Algorithm:
- String Manipulation Logic: During the exploration phase, the robot records every turn in a data string (e.g., L = Left, R = Right, S = Straight, B = Back/U-Turn).
- Optimization Forensics: The firmware analyzes the string for "Dead Ends" (B). Any sequence ending in a U-turn can be simplified. For example, a
Left + Back + Leftsequence is logically identical to aStraightmove. The solver continuously reduces the string (e.g.,LBL = S,LBS = R) until only the primary route remains.
- PID Control for Curve Smoothing:
- Analog Error Tracking: To maintain high velocity on Curved and Zig-zag tracks, the robot utilizes a Proportional-Integral-Derivative (PID) control loop.
- The Control Loop: The 8-channel sensor array returns a weighted value representing the line's position relative to the robot's center. The PID algorithm calculates the precise differential speed required for the motors to "hug" the line, minimizing overshoot and preventing the robot from "derailing" during high-speed zig-zags.
- Sensor Fusion & Intersection Logic:
- State Machine Management: The robot must distinguish between a simple curve and a T-Junction or Crossroad. By monitoring all 8 sensors simultaneously, the firmware identifies "All-Black" or "All-White" states to trigger intersection-handling routines, such as the Left-Hand-on-Wall priority rule.
Engineering & Implementation
- Differential Dynamics:
- Power-to-Weight Ratio: Utilizing high-torque micro-gearmotors and a lightweight Li-Po battery allows for rapid acceleration and braking, which is critical when approaching sharp 90-degree corners after a long straightaway.
- Hardware Efficiency:
- TB6612FNG Driver: This MOSFET-based driver is chosen over the older L298N for its higher efficiency and smaller footprint, providing cool operation even during extended maze-solving sessions.
- Calibration & Thresholding:
- Dynamic Surface Adaptation: The robot includes an auto-calibration routine that sweeps the sensors across the black tape and white background at startup. This ensures the PID loop receives raw data that is normalized against the specific ambient lighting conditions of the room.
These are the videos that I have uploaded to YouTube:
A paper about this project has been published in 2018 Seventh ICT International Student Project Conference (ICT-ISPC).
Date of Conference: 11-13 July 2018
Date Added to IEEE Xplore: 08 November 2018
DOI: 10.1109/ICT-ISPC.2018.8523975
Publisher: IEEE
Conference Location: Nakhonpathom, Thailand, Thailand
Link: https://ieeexplore.ieee.org/abstract/document/8523975
Conclusion
As a peer-reviewed project presented at the IEEE ICT-ISPC, the Maze-Runner Elite serves as a benchmark for student-led innovation in autonomous pathfinding and high-speed motion control.