Simple antenna UHF rotator
Electronic parts:
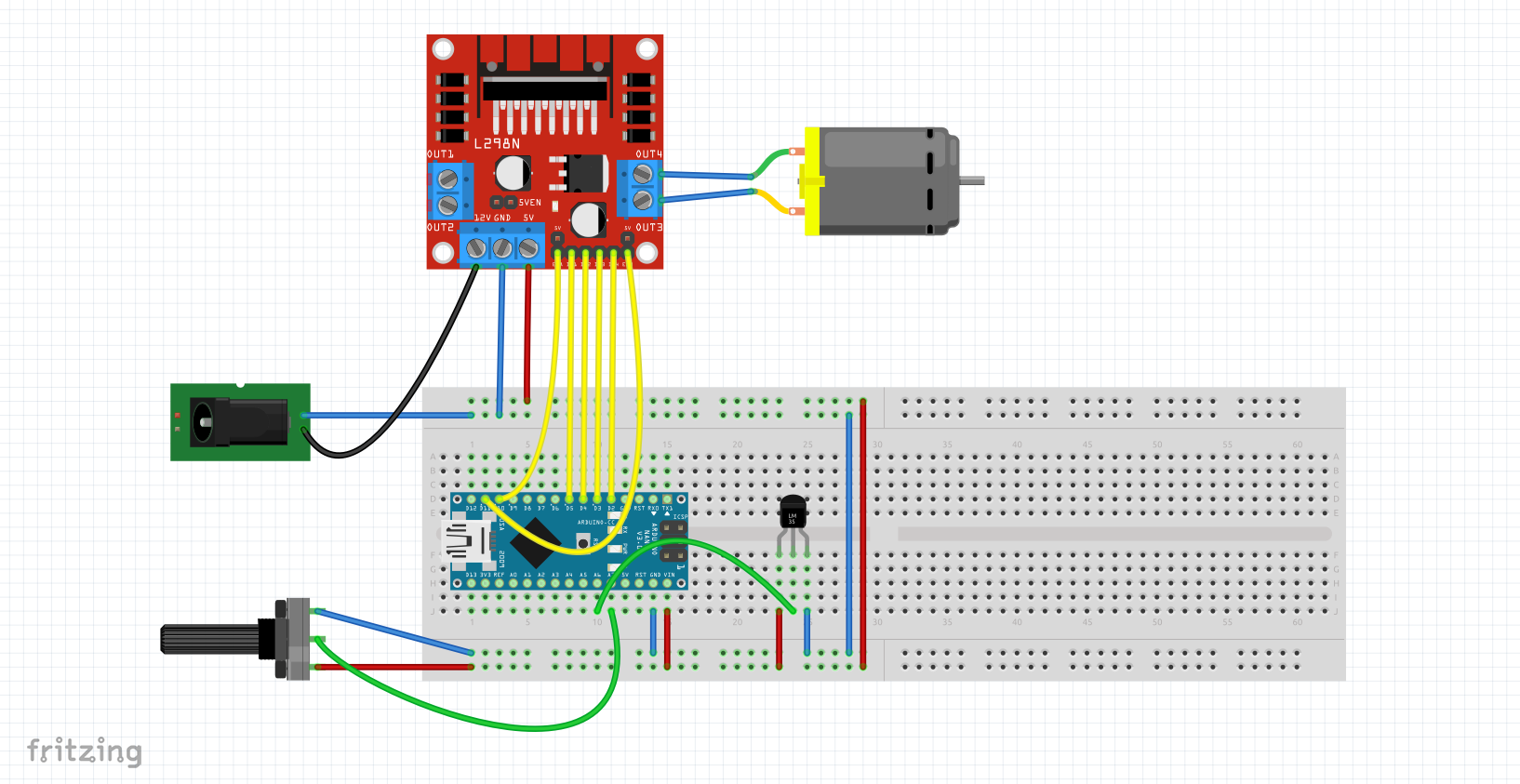
1x Arduino NANO V3,
1x L298N,
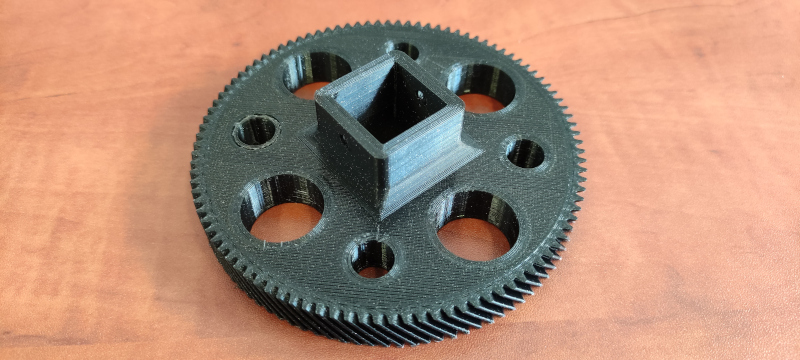
1x Motor 12 V DC whit gear,
1x Linear Multi Rotation Potentiometer (1 to 10 kOhm),
1x LM35 optional,
USB Cable to Arduino Nano or RS232 to TTL Converter.
Bearings:
2x 608Z (8x22x7 mm),
2x GE 30 ES 2RS (30x47x22 mm).
Aluminium profiles: 40x40 and 20x20 mm
Watch the video on how the rotor was made and subscribe to my YTchannel.
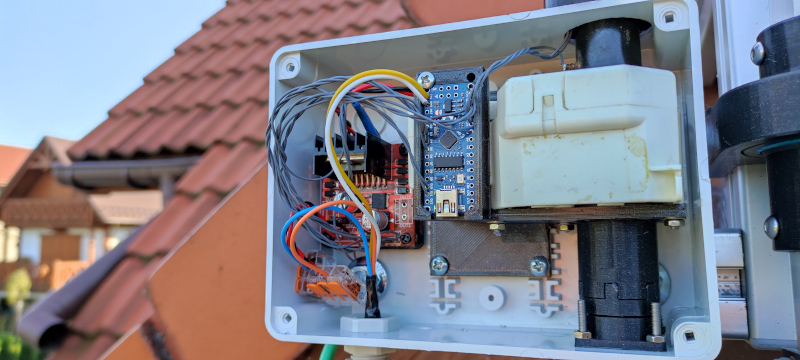
A few photos from the assembly:


Electromagnetic Telemetry: UHF Antenna Rotator
A basic Wi-Fi antenna is omnidirectional (it beams everywhere weakly). High-gain UHF (Ultra High Frequency) radio antennas are highly directional (they beam intensely over miles but only in a tight circle). The Simple UHF Antenna Rotator dynamically aims a giant physical aluminum antenna matrix perfectly at a moving target (like the ISS or a drone) using complex servo kinematics.
Absolute Planetary Positioning
If you tell a cheap SG90 servo to aim at "90 degrees," the antenna turns exactly 90 degrees relative to its own baseline. But what if the drone is physically moving north?
- The Telemetry Stream: The Arduino acts as the tracking computer. A laptop running orbital tracking software (like Gpredict for amateur satellites) dictates: "The satellite is currently at Azimuth 270 (West) and Elevation 45."
- It serializes this data and blasts it to the Arduino.
- The Arduino commands the motor via the L298N driver to grind the horizontal turntable base around to face exactly 270 degrees.
- The Linear Multi Rotation Potentiometer provides absolute positional feedback to the Arduino, ensuring the antenna stops at the precise commanded angle.
Combating Wind Load
You cannot use tiny plastic parts. A large antenna acts as a giant metal kite in a 20mph wind.
- The Motor Driver: The Arduino utilizes the L298N H-Bridge Driver to control the powerful 12V DC gear motor.
- You must program the motor control logic to maintain a holding torque when the antenna is stationary, locking the antenna physically against the wind. The gearing system, as seen in the assembly photos, provides the necessary mechanical advantage to resist these forces.
Specialized Mechanical Hardware
The robust mechanical construction is critical for stability:
- Arduino Nano: The central controller.
- L298N Motor Driver: Controls the high-torque DC gear motor.
- Linear Multi Rotation Potentiometer: Provides absolute position sensing.
- Heavy-Duty Bearings (608Z & GE 30 ES): Ensure smooth rotation under load, as shown in the spherical bearing and clutch photos.
- Aluminium Profiles (40x40 and 20x20 mm): Form the rigid frame and housing structure.
You can download all project files from HERE.
An LPDA antenna for the 2m / 70 cm bands was mounted on the rotor.
Control application running on a Linux computer. You can easily run it on a Windows computer, but remember to change the communication port settings.
VY73 de SP9MX!