I want to build a smart coop, which could open/close door, clean the floor, count and weight the poultry, to reduce my mom's diligent labor.When I was a child, she built a small coop to feed some chickens beside our house, released them every morning, attracted them back to coop every evening by yelling and spreading the rices, then grounded them into the coop...All of these's left a deep impression on me.
However there's fewer and fewer people living in village now because of urbanization, I've moved into city but never met a delicious chicken feast maybe because of high-density feeding. Anyway I think the previous free-range feeding model is great, and we can copy and expand this model by building smart coops.
The basic tasks are open/close the door, clean the floor, others will be developed later, also we need schedule tasks at specific time by sending command from iot cloud.
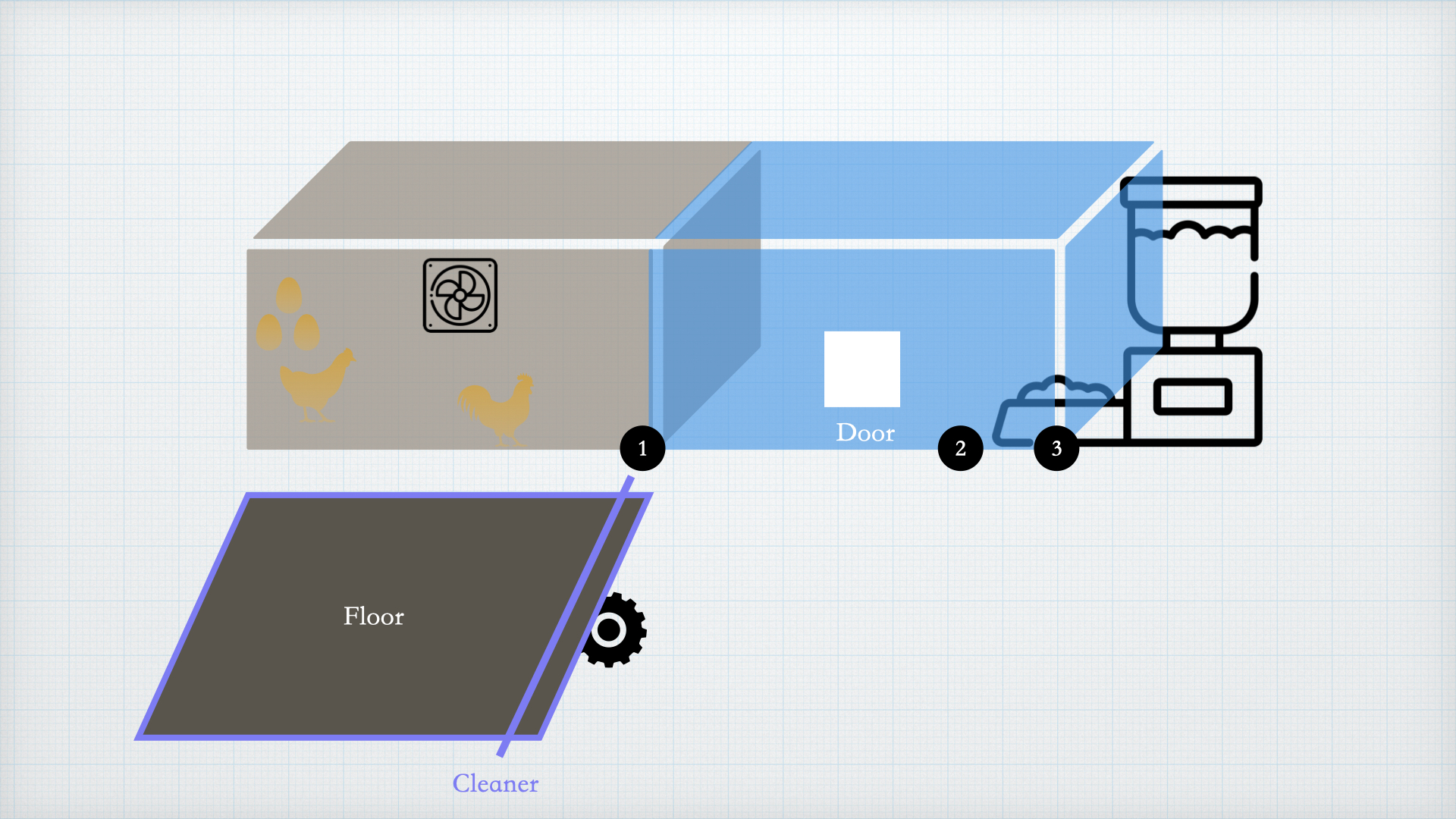
the blue box is cage actually, poultries could go there when the floor's moved to end, then they can enjoy food and go out freely when the door is open.
Technical Deep-Dive: 4-Way Gate & Servo Harmonic Orchestration
- Open/Close Mechanism
Using two servo motors to achieve the four-way door, which could close, enter but can't exit, exit but can't enter, both enter and exit, when servo motor change degree to 0 means close, 90 means open, two motors form the four ways, such as 00, 01... I think it's easier to clean when there's no poultries and it's more convenient if they can only enter the coop but can't go outside any more when dark.
- The Quad-State Logic Diagnostics: The gate system utilizes dual 9g servos to achieve four distinct operational modes. Forensics involve mapping $(S_1, S_2)$ angular states:
00(Full-Lock),01(In-Only),10(Out-Only), and11(Free-Range). This orchestration allows for automated evening lockdowns while permitting late-returning poultry to enter the biological-security perimeter. - Servo-Kinematic Heuristics: Diagnostics monitor the pulse-width modulation $(PWM)$ signals sent to the Feetech servos, ensuring that the $(0-90)$ degree transitions are executed with sufficient torque to overcome mechanical friction without stalling the Nano ESP32's logic-rail.
- The Quad-State Logic Diagnostics: The gate system utilizes dual 9g servos to achieve four distinct operational modes. Forensics involve mapping $(S_1, S_2)$ angular states:
Technical Deep-Dive: Position Feedback & Floor-Cleaning Forensics
- Clean Mechanism
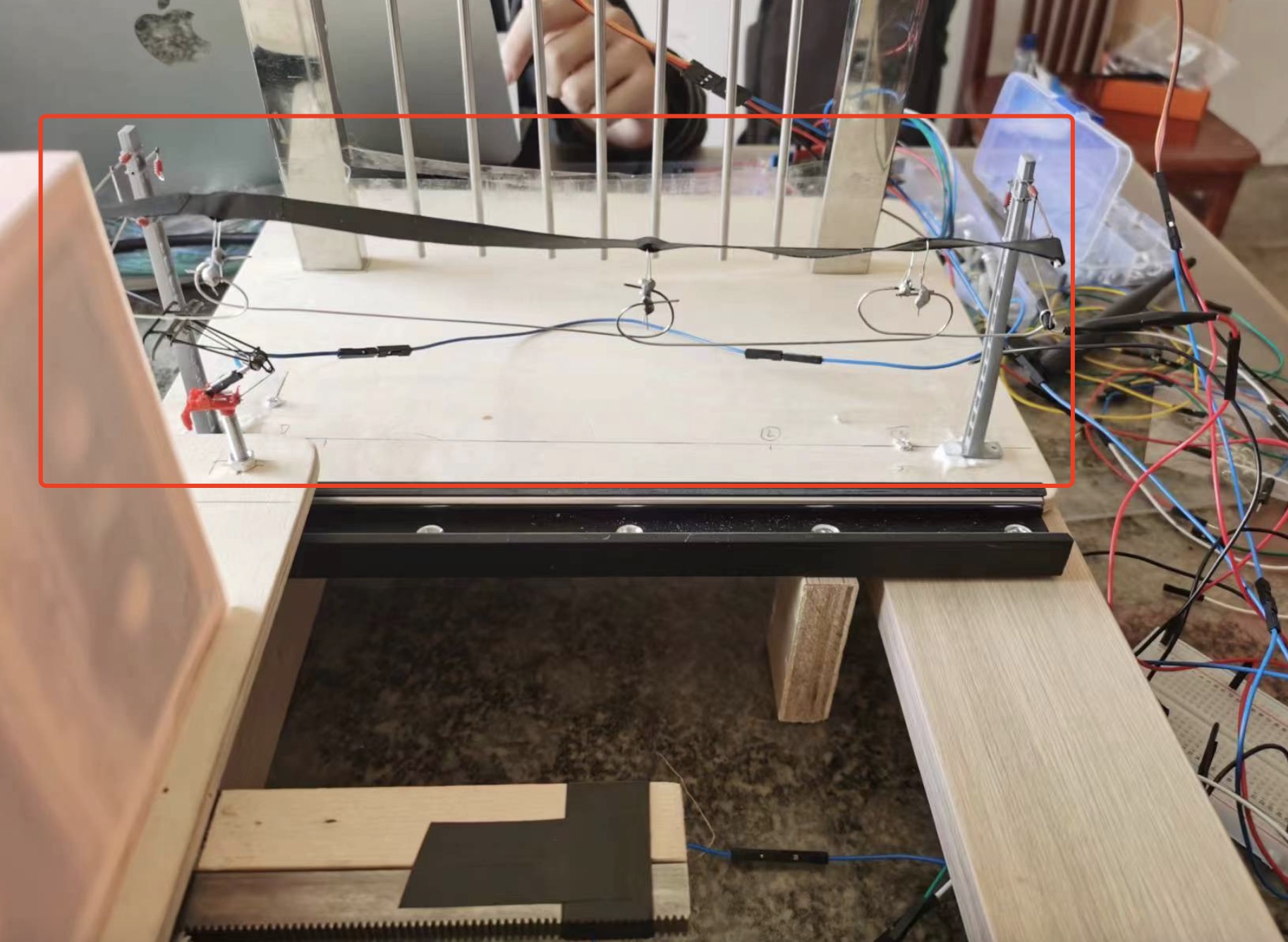
Using a dc motor to move the floor from left(position 1) to right(position 3), maybe you've notice the middle position 2. when the floor is moved to position 2, poultries could't get the food and have to go out for foraging, such as eating pests, so I diy a simple potentiometer only using single pin.
- The Linear-Potentiometer Position Diagnostics: To manage the sliding floor cleaner, the build features a custom DIY linear potentiometer, as shown in the image below. Forensics involve capturing the high-resolution analog voltage-gradient across the slider's travel-path. The diagnostics identify three discrete spatial coordinates $(P_1: \text{Active-Food}, P_2: \text{Restricted}, P_3: \text{Cleaning-Flush})$, enabling precise DC-motor termination heuristics.
- Brushless-DC (BLDC) Torque Orchestration: The floor-sliding mechanism is driven by a BLDC motor. Diagnostics focus on managing the high-current transients required to move the floor-mass, utilizing the ESP32's high-velocity logic-engine to prevent mechanical-binding events.
Engineering & Implementation: IoT-Cloud Telemetry & Scheduling Heuristics
- Schedule Tasks
We need open the door at 7 o'clock, clean the floor at 8 o'clcok...so we need a system to schedule tasks runing at specific time and repeat these tasks day by day, I create some commands as shown in the following image:
- Remote-Command Serialization Forensics: The system receives complex timestamped command-strings via the IoT Cloud $(\text{e.g., } \text{2023-12-01.../101-06:30...})$. Forensics involves parsing these strings into a nested array of mechatronic triggers, allowing the coop to execute a 24-hour cycle of automated "Chores" without human intervention.
- RTC-Synchronized Logic Integrity: By utilizing the ESP32's internal Real-Time Clock $(RTC)$ synchronized with NTP servers, the system ensures that poultry-gate transitions occur with sub-second temporal accuracy, critical for morning release and evening predator-prey mitigation.
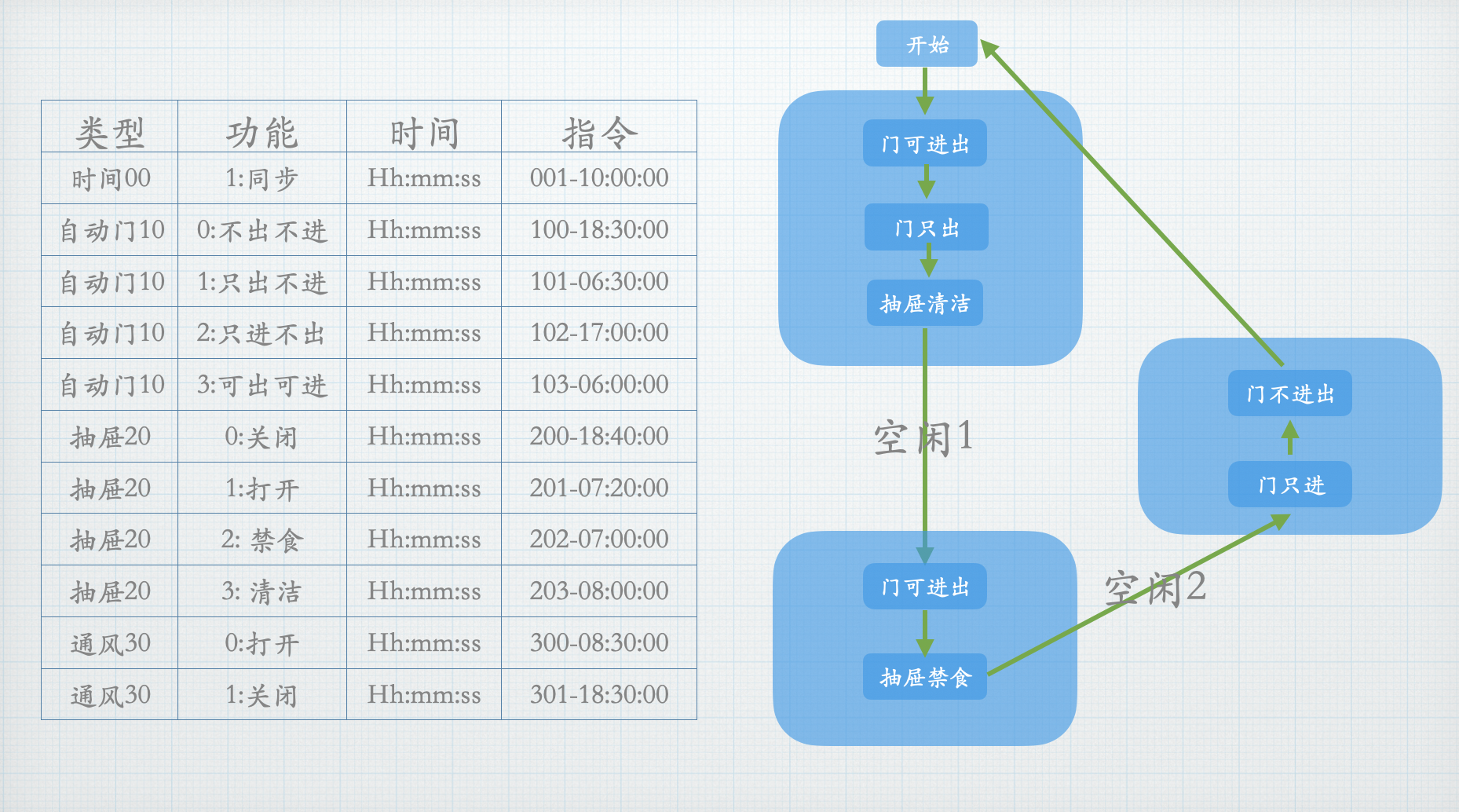
For example, a command with version is:
2023-12-01-01-0:103-06:00:00/101-06:30:00/202-07:00:00/203-07:20:00/103-07:30:00/102-17:00:00/100-18:00:00;
Structural Mechatronic Hardening
- The build utilizes a 12V power rail stepped down for logic-level diagnostics. Forensics into the cable-routing and soldering-joint integrity ensure that the agricultural node remains operational in dusty, high-vibration environment typical of active poultry-enclosures.
Conclusion
So you can see it's just a simple prototype which can't really work, there's a lot of work to do, I'll improve the coop ASAP. Coop-IoT represents the pinnacle of Smart-Farm Instrumentation. By mastering Mechatronic Gate Forensics and Cloud-Synchronized Scheduling Diagnostics, this project delivers a scalable, professional-grade agricultural tool that honors legacy farming models through modern IoT precision.
Autonomous Aviary: Mastering agricultural telemetry through mechatronic forensics.