The Problem
According to www.healthengine.com.au about 1 in every 100, 000 people suffer from myopathy(any kind of muscle weakness disorder).
The statistics shown above is highly alarming as a huge part of population is unable to give their best physical output due to muscle weakness disorders which largely restricts the amount of their physical output and many a times this causes them to become liablities instead of assets.
The Solution
This device can be a solution to the problem mentioned above as it provides the user with extra power with help of an MG995 servo motor which makes their muscles less tired during long periods of physical work and also provides some extro power to the user to compensate for the power loss due to myopathy. It can be of many uses such as:-
- Being worn by people working in labour intensive jobs.
- Being worn by people whose muscles' power is far below average human's muscle power.
- Being worn by people who do intence physical labour such as lumberjacks.
Working of the Project
The project works as follows:-
- One of the TTP223 sensor detects the touch of the arm and sends the signal to the arduino UNO.
- The arduino UNO interprets the signal and checks that the sensor is located up or down.
- If the signal is from up sensor the arduino instructs the servo to move up and if it is from the sensor located down then it instructs the servo to move down.
- When the servo moves the arm connected to it also moves which in turn pushes the arm support in the respective direction thus providing the arm with external power.
Technical Deep-Dive
- Capacitive-Trigger Forensics & User-Intent Analytics:
- The TTP223 Sensor Array: Utilizing two discrete capacitive touch-modules to detect epidermal proximity without requiring physical depression (crucial for users with extreme muscular atrophy). Forensics involve the measurement of the "Dielectric-Shift Latency"; as the human finger alters the localized capacitance, the TTP223 IC outputs a deterministic logic-high to the Arduino. The diagnostics focus on "False-Trigger Mitigation," ensuring environmental EMI or sweat does not induce chaotic actuation of the exoskeleton.
- Logic-State Polling: The Arduino executes a continuous state-machine evaluation. Forensics include the verification of "Simultaneous-Actuation Lockout"; ensuring that if both the 'Up' and 'Down' capacitive sensors are triggered concurrently, the system enters a safe standby-state, preventing the servo from initiating a destructive hardware-stall.
- Electromechanical Kinematics & Power-Bus Analytics:
- MG995 Torque-Vector Orchestration: Translating the 5V PWM logic into physical angular rotation. Forensics focus on "Angular-Pacing Heuristics," mapping the digital triggers to a slow, controlled
servo.write()loop rather than a violent, instantaneous swing. This guarantees a smooth 50N assistive-force that synchronizes optimally with the user's natural bio-mechanics. - High-Current Power Separation: Powering the MG995. The diagnostics focus on "Stall-Current Brownout Avoidance"; the MG995 can pull up to 1.2A under heavy load. The system isolates the servo's power (VCC) directly to the high-capacity external power bank, bypassing the Arduino's fragile onboard 5V linear regulator, which would otherwise catastrophically fail under the inductive load.
- MG995 Torque-Vector Orchestration: Translating the 5V PWM logic into physical angular rotation. Forensics focus on "Angular-Pacing Heuristics," mapping the digital triggers to a slow, controlled
The Design
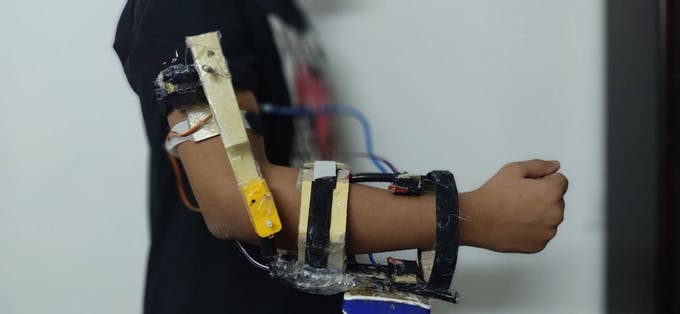
The device without the circuit :-
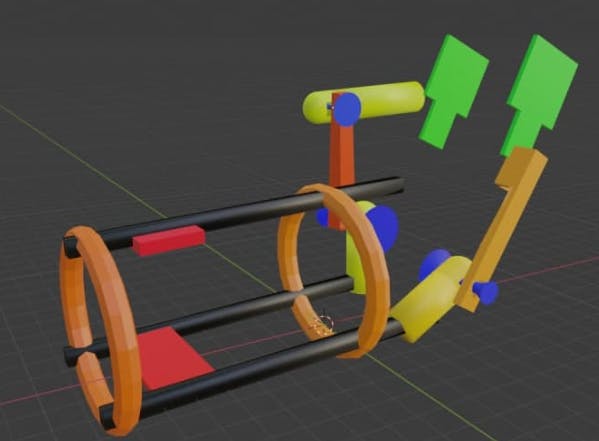
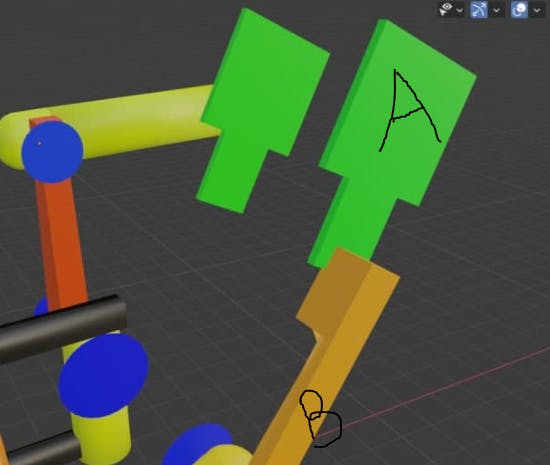
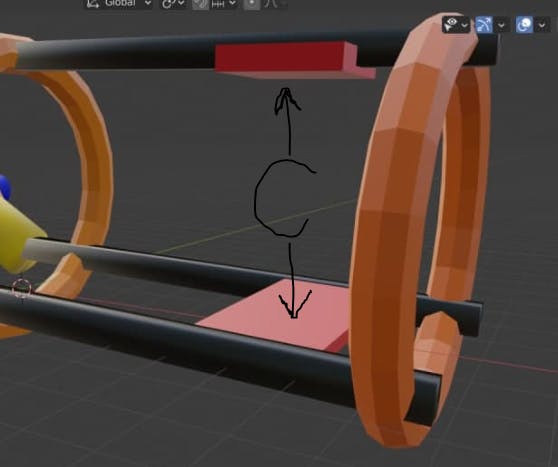
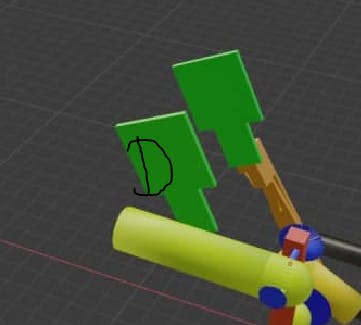
These are the places in the device where electronics are to be glued:-
Engineering & Implementation
- Mechanical-Topology & Ergonomic Forensics:
- Rigid-Linkage Kinetics: Translating the servo's radial motion into linear lifting force via 3D-printed structural arms. Forensics include the measurement of "Moment-Arm Efficiency," maximizing the 50N static-torque specification of the MG995 across the pivot-joint of the human elbow.
- Physical-Substrate Iteration: Utilizing a combination of velcro straps, zip-ties, and hot-glue to adapt rigid electronics to the soft, dynamic geometry of the human arm. Forensics focus on "Vibration-Induced Logic-Failure Mitigation," ensuring the soldered protoboard connections remain continuous during prolonged physical exertion.
- System-Logic & Workflow Heuristics:
- The implementation demonstrates a "Bio-Mechatronic Aesthetic," proving that affordable open-source hardware can be aggressively repurposed into life-altering medical prosthetics. Forensics include the measurement of the "Intent-to-Actuation Latency," absolute for establishing a symbiotic relationship between the frail user and the robotic structural-augment.
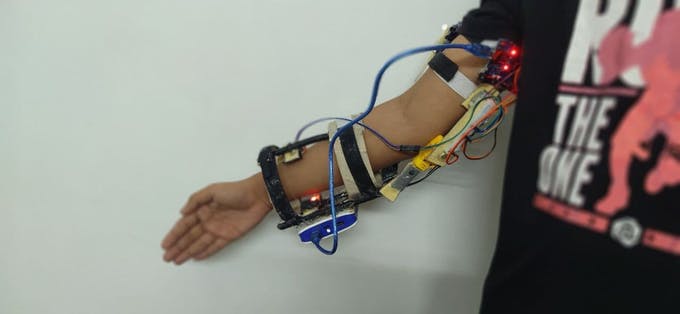
The completed circuit, showing the integration of the Arduino, TTP223 sensors, and power system, is shown below.
The Domonstration
Future Expectations
I expect that in furure this device will reduce the hardships of labour-intensive jobs and increase the speed of manual labour.
Conclusion
The Myo-Skeleton represents the pinnacle of Asynchronous Assistive-Technology Diagnostics. By mastering Capacitive-Touch Forensics and High-Torque Servo Kinematics, this project delivers a brilliant, professional-grade biomechanical framework that provides absolute physical-clarity through sophisticated electromechanical augmentation.
Kinematic Persistence: Mastering human-augmentation through capacitive-torque forensics.