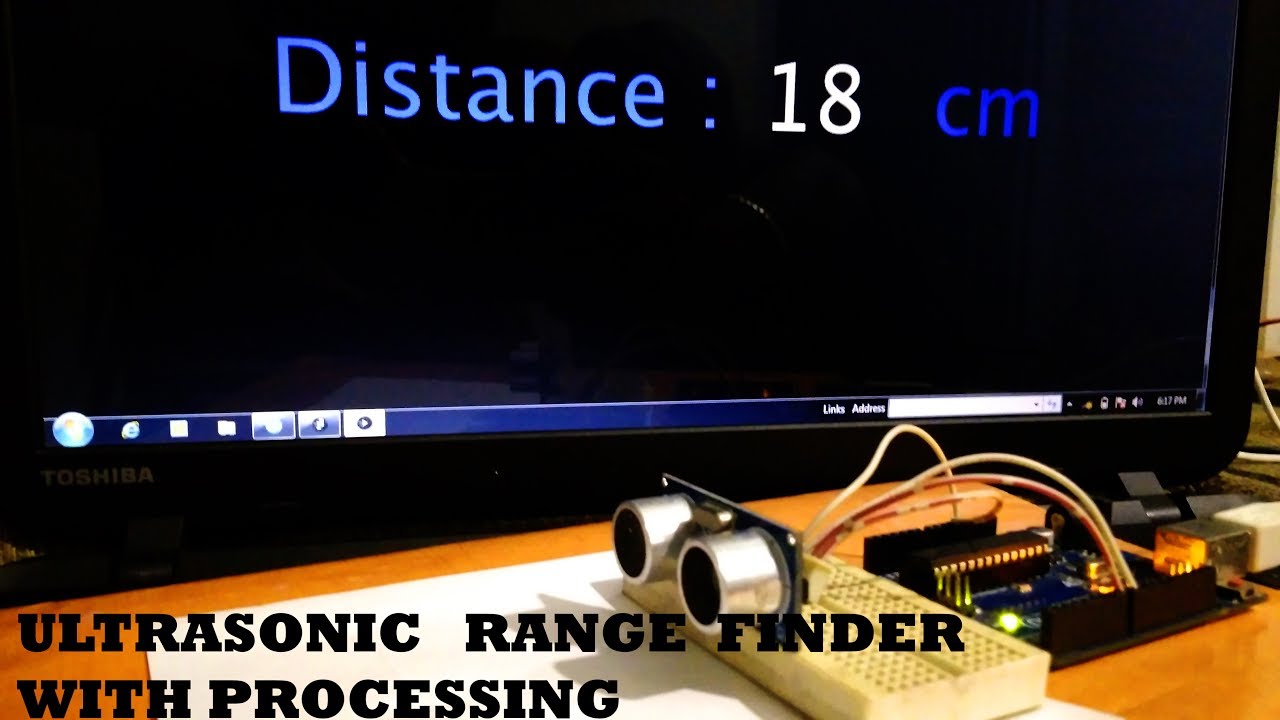
This project is used to measure the distance of obstacles using an ultrasonic range module. The video contains a complete tutorial.
Project Perspective
Ultrasonic Rangefinder with Processing is a fundamental and innovative "Digital Radar" bridge for modern electronics developers. By focusing on the essential building blocks—the HC-SR04 acoustic-echo logic and the Processing-based coordinate-mapping system—you'll learn how to orient yourself and automate your range visualization using specialized software logic and a robust basic setup.
Technical Implementation: Acoustic Waves and Polar Visualization
The project reveals the hidden layers of simple sensing-to-data interaction:
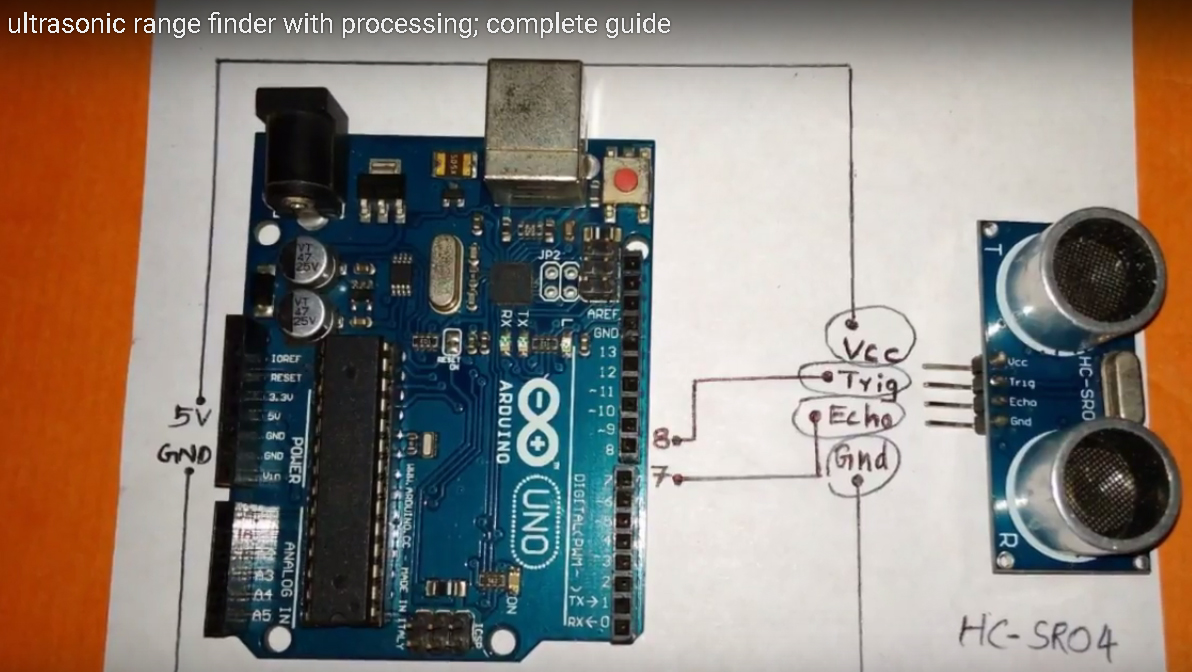
- Identification layer: The HC-SR04 Sensor acts as a high-resolution acoustic eye, measuring the distances to objects via microsecond echo timing.
- Conversion layer: The system uses 2 digital Pins to receive high-speed PWM pulses for mission-critical sensing tasks.
- Actuation Interface layer: An SG90 Micro Servo provides high-resolution visual and mechanical feedback for your radar scan angle (e.g., 0-180 degrees).
- Communication Interface layer: A high-speed Serial Bridge provides manual data-dispatch or automated status checks during initial calibration.
- Processing Logic: The Processing code follows a "polar-mapping" (or radar-dispatch) strategy: it interprets serial distance-angle pairs and matches them to graphical arcs to provide safe and rhythmic range plotting on your monitor.
- Communication Dialogue Loop: Distance codes are sent rhythmically to the Serial Monitor during initial calibration.
Hardware-Software Infrastructure
- Arduino Uno: The "brain" of the project, managing multi-directional sensor sampling and coordinating servo and serial sync.
- HC-SR04 Ultrasonic Sensor: Providing a clear and reliable "Measuring Link" for the rangefinder.
- SG90 Micro-Servo: Providing a high-capacity and reliable physical interface for your first successful "Radar Mission."
- Breadboard: A convenient way to prototype the radar-electronics circuit and connect all components without soldering.
- Processing (on PC): Essential for providing clear and energy-efficient 2D/3D visualization for your first software logic mission.
- Micro-USB Cable: Used to program your Arduino and provides the primary interface for the system controller.
[!IMPORTANT] The Serial Communication requires an accurate Baud Rate mapping (usually 9600) between the Arduino and the Processing code; always ensure you have an appropriate Fail-Safe flag if the servo overloads!
Future Expansion
- OLED Identity Dashboard Integration: Add a small OLED display on the back of your prototype to show "Closest Object distance" or "Battery (%)".
- Multi-sensor Climate Sync Synchronization: Connect a specialized "PIR Motion Sensor" to perform higher-precision "Human Alert" wirelessly via the cloud.
- Cloud Interface Registration Support Synchronization: Add a specialized web-dashboard on a smartphone over WiFi/BT to precisely track and log the total radar history.
- Advanced Velocity Profile Customization Support: Add specialized "Machine Learning (vCore)" to the code to allow triggers to be changed automatically based on the user height!
Ultrasonic Rangefinder with Processing is a perfect project for any science enthusiast looking for a more interactive and engaging visualization tool!