in this video I show you how to work with mpu6050, what is mpu6050, how to set it up. at all every thing I know just share with you guys and hope its be usefull for you, don't forget like, subscribe and share this video. peace :)
full tutorial on my youtube channel
what is mpu6050 :
The MPU-6050 is the world’s first and only 6-axis motion tracking devices designed for the low power, low cost, and high performance requirements of smartphones, tablets and wearable sensors.
Introduction to MPU6050 :
- MPU6050 is a Micro Electro-mechanical system (MEMS), it consists of three-axis accelerometer and three-axis gyroscope. It helps us to measure velocity, orientation, acceleration, displacement and other motion like features.
- MPU6050 consists of Digital Motion Processor (DMP), which has property to solve complex calculations.
- MPU6050 consists of a 16-bit analog to digital converter hardware. Due to this feature, it captures three-dimension motion at the same time.
- This module has some famous features which are easily accessible, due to its easy availability it can be used with a famous microcontroller like Arduino. Friend if you are looking for a sensor to control a motion of your Drone, Self Balancing Robot, RC Cars and something like this, then MPU6050 will be a good choice for you.
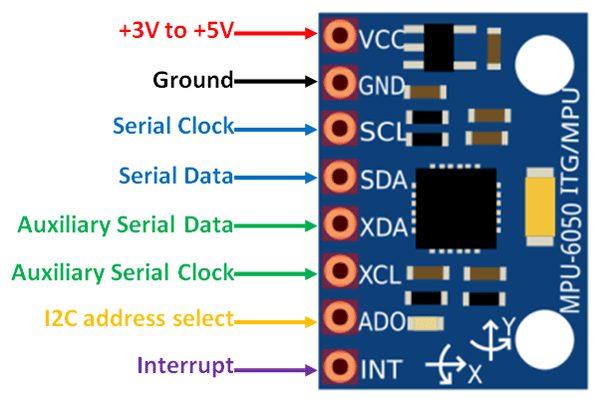
- This module uses the I2C module for interfacing with Arduino.
- MPU6050 is less expensive, Its main feature is that it can easily combine with accelerometer and gyro.
Subscribe to my youtube channel
Follow me on instagram

Subscribe to my youtube channel
Follow me on instagram
references :
https://www.youtube.com/c/pmgoharian
https://www.theengineeringprojects.com
EXPANDED TECHNICAL DETAILS
Inertial Measurement Unit (IMU) Theory
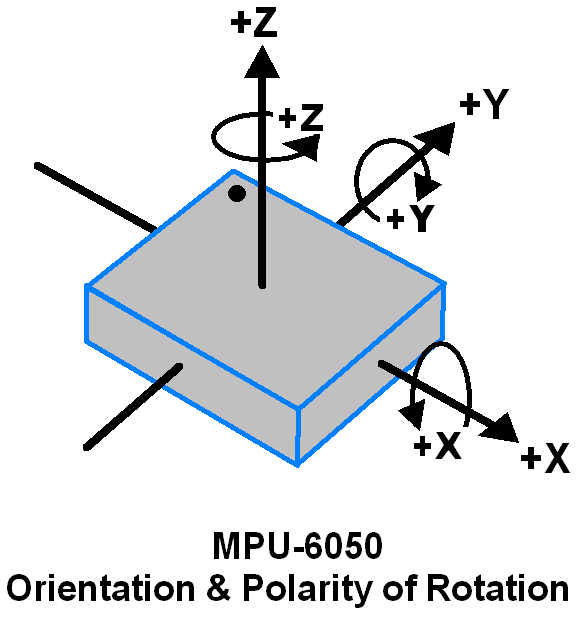
The MPU6050 is a 6-axis MotionTracking device that combines a 3-axis gyroscope and a 3-axis accelerometer.
- Sensing Technology: It uses MEMS (Micro-Electro-Mechanical Systems) to detect rotation and acceleration. The internal Digital Motion Processor (DMP) can offload complex calculations like sensor fusion (merging gyro and accel data) from the host Arduino.
- Communication: Interfaces via the I2C bus (SDA and SCL pins).
Practical Implementation
- Data Visualization: Typically paired with a Processing sketch to show a real-time 3D model of the board's orientation.
- Applications: This sensor is the "brain" behind self-balancing robots, drone stabilization (gimbals), and gesture-based controllers, making it one of the most essential components in modern hobbyist robotics.