ชื่อโปรเจกต์: 2-Axis driver สำหรับ Stepper Motor ด้วย FlySky RC
โปรเจกต์ควบคุม Camera Crane นี้แสดงให้เห็นถึงวิวัฒนาการในการพัฒนาระบบ Precision Motion Control โดยใช้ Stepper Motor เป็น Actuator หลัก การพัฒนาแบ่งออกเป็น 5 เฟส เพื่อเพิ่มขีดความสามารถตั้งแต่ระบบ analog พื้นฐาน ไปจนถึงระบบไร้สายที่มี Telemetry feedback และการรักษาเสถียรภาพอัตโนมัติ
ภาพรวมของระบบและส่วนประกอบหลัก
หัวใจหลักของระบบนี้คือการเลือกใช้ Stepper Motor ร่วมกับ Driver กำลังสูงรุ่น D8060H (6A) ซึ่งสามารถจ่ายกระแสได้สูงสุดถึง 6 แอมป์ และรองรับช่วงแรงดันไฟฟ้าที่กว้าง สิ่งนี้ทำให้สามารถขับเคลื่อน Crane และกล้องที่มีน้ำหนักมากได้อย่างเสถียรด้วย Torque ที่สม่ำเสมอ
เฟสที่ 1: ระบบควบคุมพื้นฐานและการจัดการพลังงาน
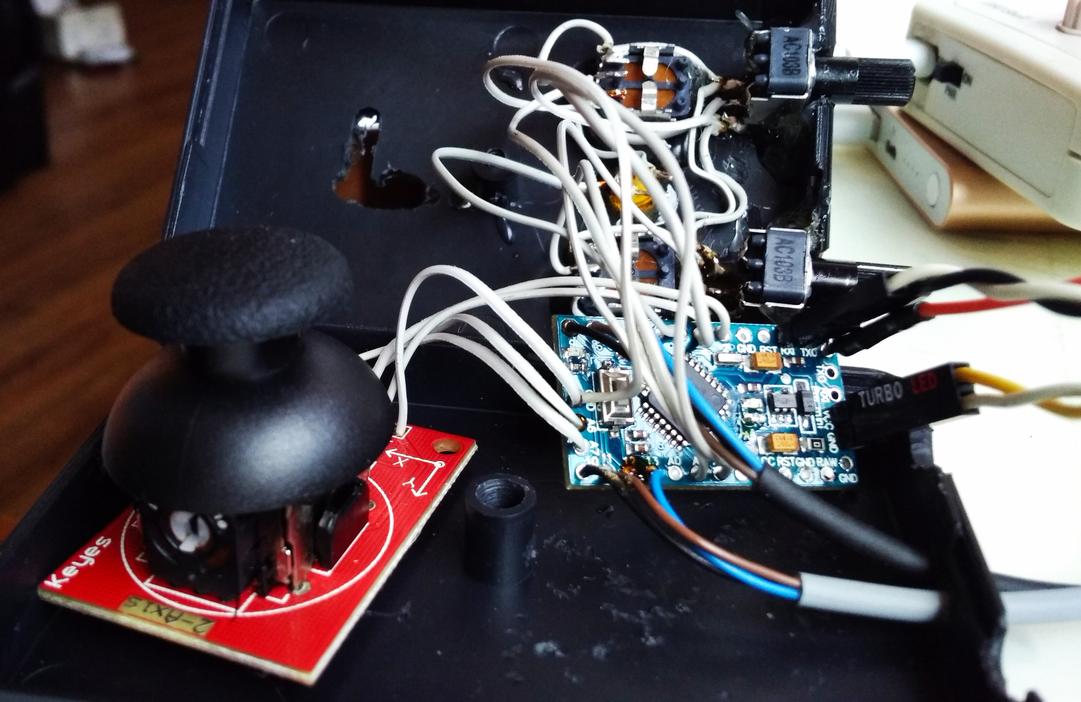
ในเฟสเริ่มต้น การควบคุมถูกออกแบบมาให้เรียบง่ายโดยใช้ 2-axis Joystick สำหรับการควบคุม Pan และ Tilt พร้อมคุณสมบัติหลักดังต่อไปนี้:
- Real-time Adjustment (การปรับแบบเรียลไทม์): มีการติดตั้ง Potentiometer แยกกันสองตัวต่อมอเตอร์หนึ่งชุด เพื่อตั้งค่า Maximum Speed และ Acceleration สิ่งนี้ช่วยให้ผู้ควบคุมสามารถปรับความราบรื่นของการเคลื่อนที่กล้องได้อย่างละเอียดตามความต้องการของงาน
- Low Power Design (การออกแบบพลังงานต่ำ): เพื่อยืดอายุการใช้งานแบตเตอรี่ ความเร็ว Clock ของ Microcontroller ถูกลดลงเหลือ 8MHz และทำงานที่ 4.5V นอกจากนี้ยังมีฟังก์ชัน Automatic Shutdown ที่ตัดการจ่ายไฟหากไม่มีการเคลื่อนไหวเกิน 5 นาที
- Limitations (ข้อจำกัด): ในเฟสนี้ ความถี่ของ Pulse สูงสุดคือ 200Hz ซึ่งเหมาะสำหรับการเคลื่อนไหวด้วยความเร็วต่ำถึงปานกลางเท่านั้น


เฟสที่ 2: การพัฒนา Drive Logic ด้วย CTC Mode
เพื่อให้ได้การเคลื่อนไหวที่ราบรื่นระดับ "Cinematic" หรือระดับมืออาชีพ Logic ในการสร้าง Pulse จึงถูกเขียนขึ้นใหม่ทั้งหมด:
- Hardware Timers: เลือกใช้โหมด CTC (Clear Timer on Compare Match) ของ Timer 1 และ Timer 2 ใน Processor เพื่อสร้างสัญญาณความถี่ที่แม่นยำในระดับ Hardware ซึ่งช่วยลด Jitter ที่เกิดจากการประมวลผลด้วย Software
- High-Frequency Control (การควบคุมความถี่สูง): สามารถทำความถี่ได้ตั้งแต่ 2kHz ถึง 16kHz เมื่อรวมกับการตั้งค่า Microstepping สูงๆ บน Driver D8060H สิ่งนี้ทำให้มอเตอร์หมุนได้อย่างราบรื่น เงียบ และลดการสั่นสะเทือนที่ส่งไปยังกล้อง
เฟสที่ 3: การเปลี่ยนไปสู่ระบบไร้สาย (RC Integration)
เพื่อเพิ่มอิสระในการทำงานของช่างภาพ จึงได้นำระบบควบคุมระยะไกล FlySky RC (radio control) มาใช้งานเพื่อทดแทนสายเคเบิล ทำให้สามารถควบคุม Crane จากระยะไกลได้โดยไม่มีข้อจำกัดด้านสถานที่


เฟสที่ 4: ระบบป้องกันและ Telemetry Feedback
เมื่อมีการควบคุมระยะไกล ความปลอดภัยจึงเป็นสิ่งสำคัญที่สุด ในเฟสนี้ได้มีการเพิ่มระบบ Feedback Control เข้ามา:
- Multi-turn Potentiometer: ติดตั้งบนแกนหมุนของมอเตอร์เพื่อตรวจจับตำแหน่งที่แท้จริง ทำให้ระบบสามารถตั้งค่า Soft Limits เพื่อหยุดมอเตอร์ก่อนที่จะเกิด Mechanical Crash
- Smart Telemetry Hack: คุณสมบัติที่โดดเด่นคือการส่งค่า Position กลับไปแสดงผลบนหน้าจอของรีโมท FlySky โดยการ Map ค่าจาก Analog Input ของ Arduino ไปยัง Telemetry channel แม้ว่าข้อจำกัดของรีโมทจะทำให้ต้องแสดงผลหน่วยเป็น "temperature" หรือ "RPM (Revolutions Per Minute)" แต่ผู้ใช้สามารถอ่านค่าดังกล่าวเป็นเปอร์เซ็นต์ (%) เพื่อประเมินตำแหน่งของ Crane ได้ทันที
เฟสที่ 5: ทิศทางในอนาคตสู่ Active Stabilization System
ในขั้นสุดท้าย ทีมพัฒนาวางแผนที่จะติดตั้งเซ็นเซอร์ Accelerometer/Gyroscope เพื่อสร้างระบบรักษาเสถียรภาพอัตโนมัติ (Gimbal Functionality) สิ่งนี้จะช่วยให้กล้องคงอยู่ในแนว Level ได้ตลอดเวลา แม้ว่า Crane จะเคลื่อนที่อย่างรวดเร็วหรือประสบกับการสั่นสะเทือนจากภายนอก
โปรเจกต์นี้เป็นตัวอย่างที่ยอดเยี่ยมของการประยุกต์ใช้ความรู้ด้าน Embedded Engineering เพื่อแก้ปัญหาในโลกแห่งความเป็นจริง ตั้งแต่การจัดการพลังงานและ Hardware Timers ขั้นสูง ไปจนถึงการสื่อสารข้อมูลไร้สายและ Closed-loop Feedback เพื่อสร้างเครื่องมือสำหรับงาน Production ระดับมืออาชีพ