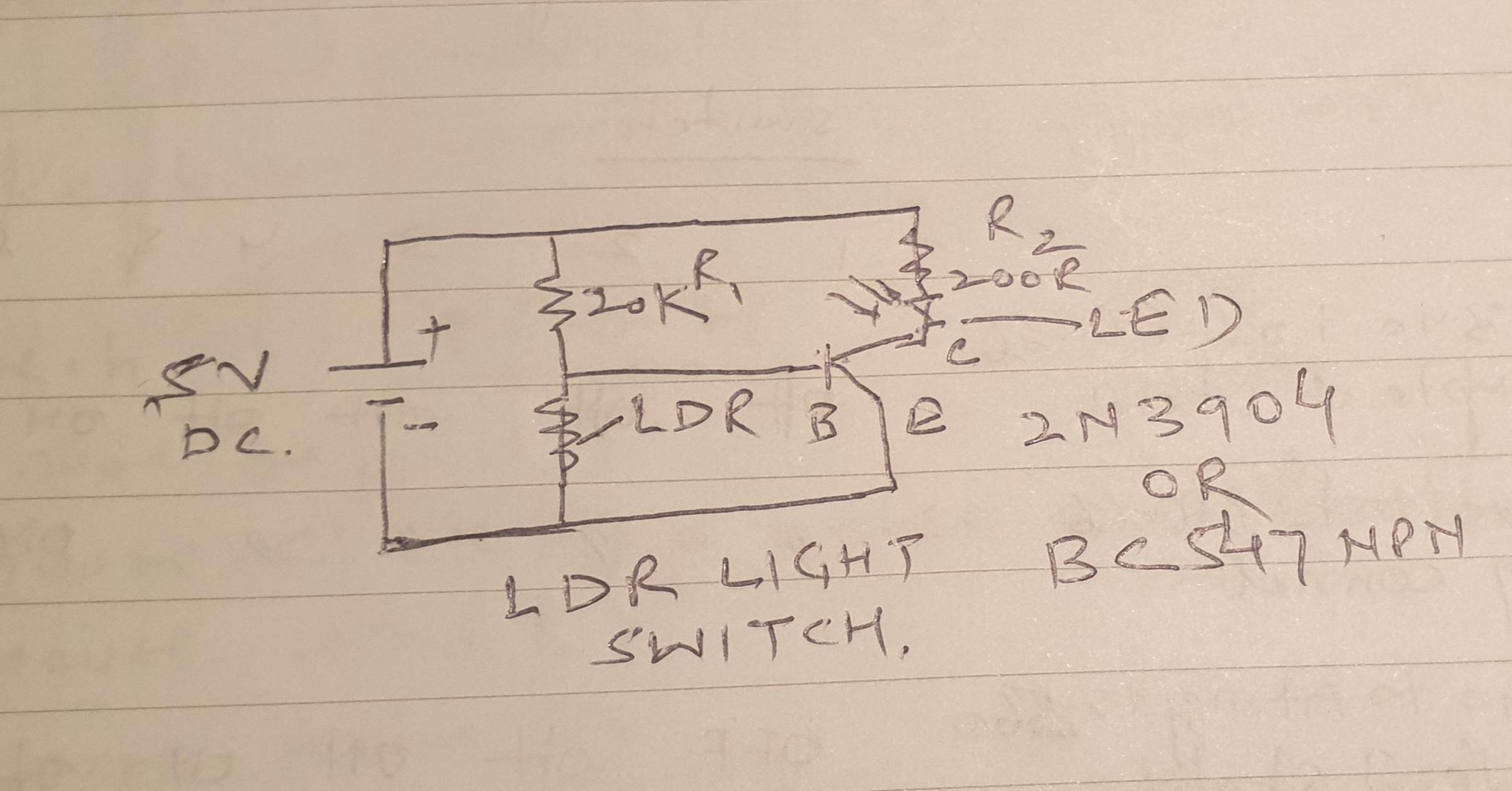
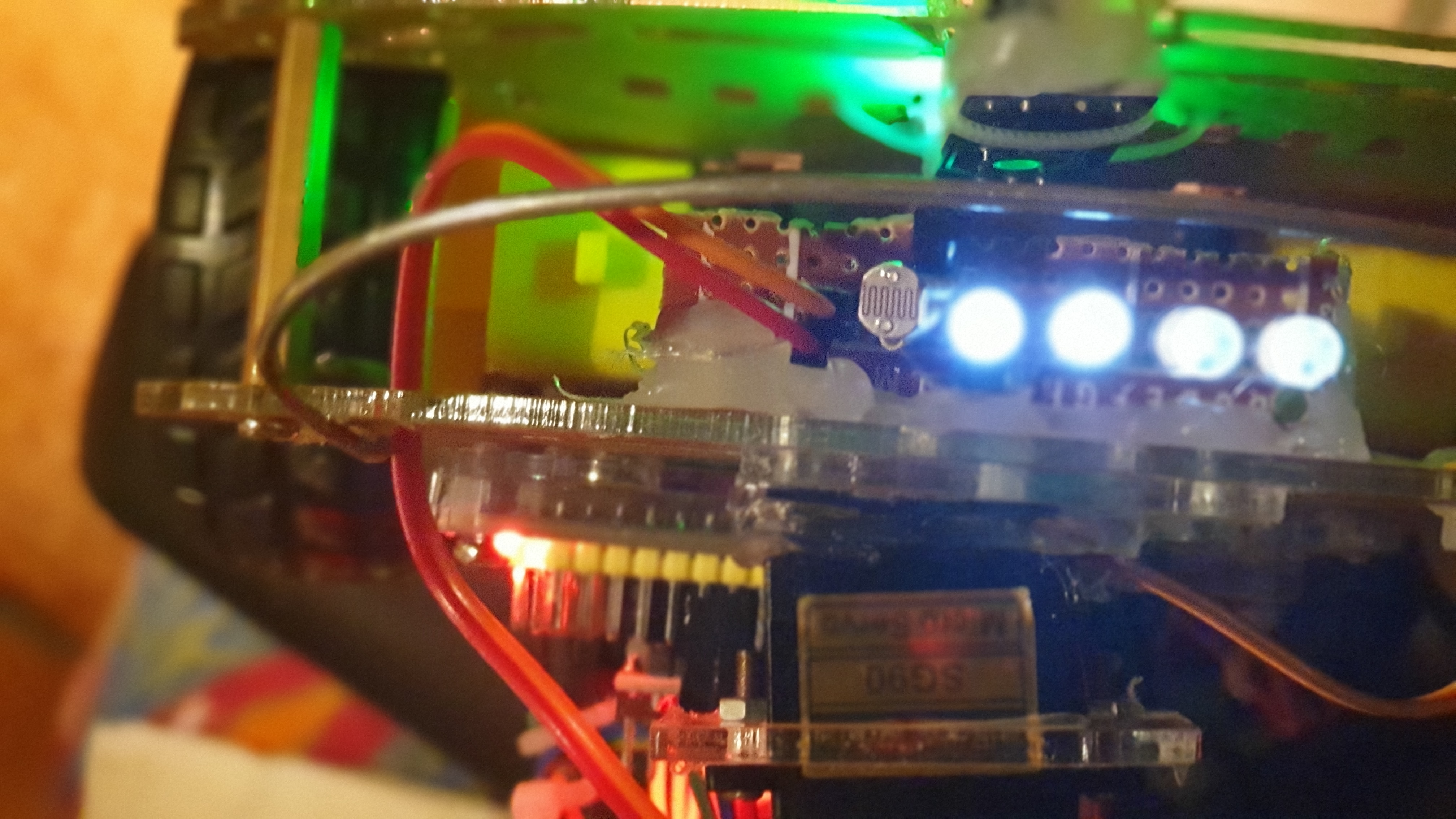
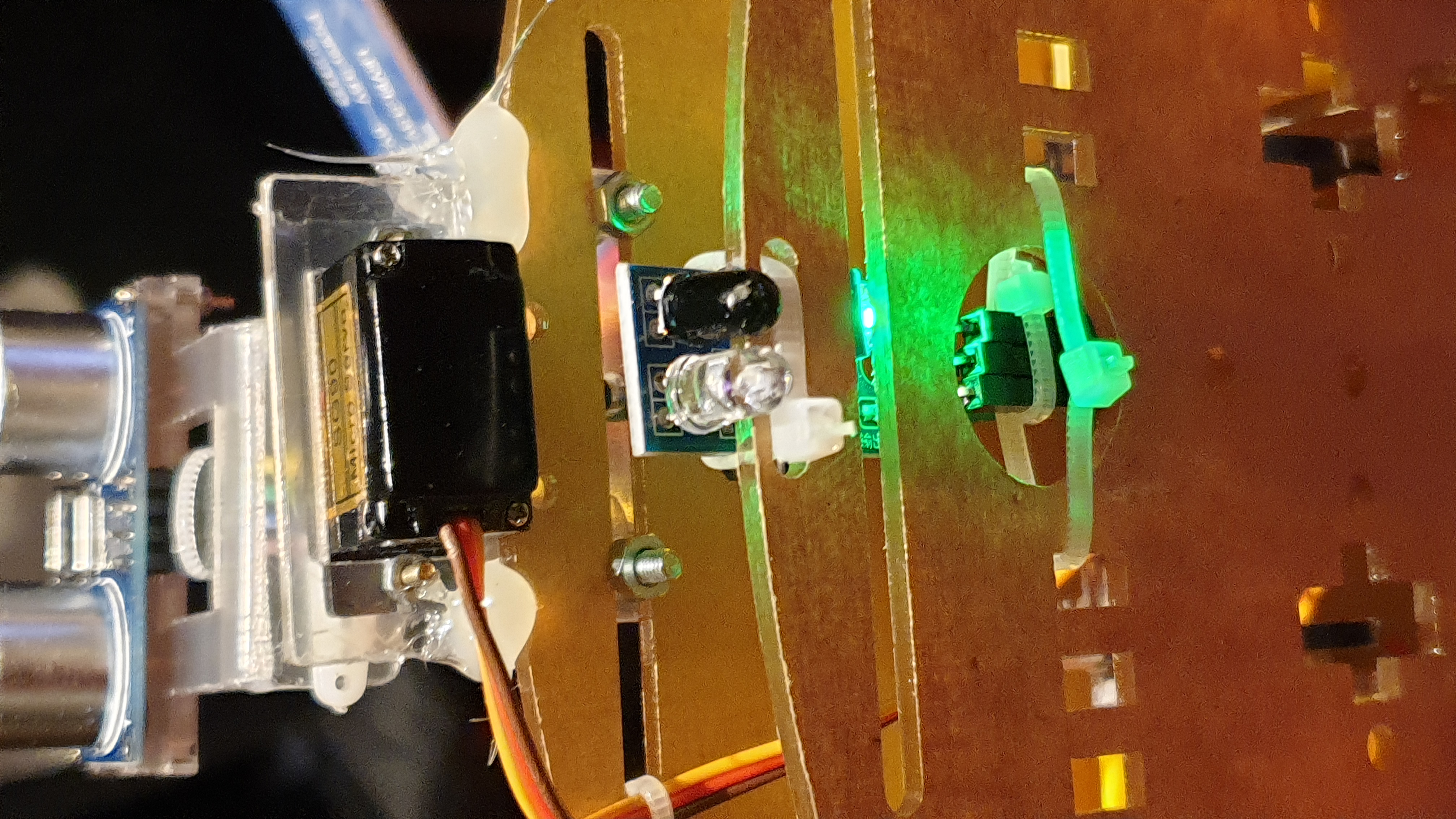
**ตัวเลือกเสริม:** วงจร LDR นี้จะสั่งให้ไฟติดเมื่อมืด และดับเมื่อมีแสง เอาไปทำเป็นบอร์ดควบคุมหลอดไฟอัตโนมัติก็ได้นะ งานนี้จัดไปวัยรุ่น!
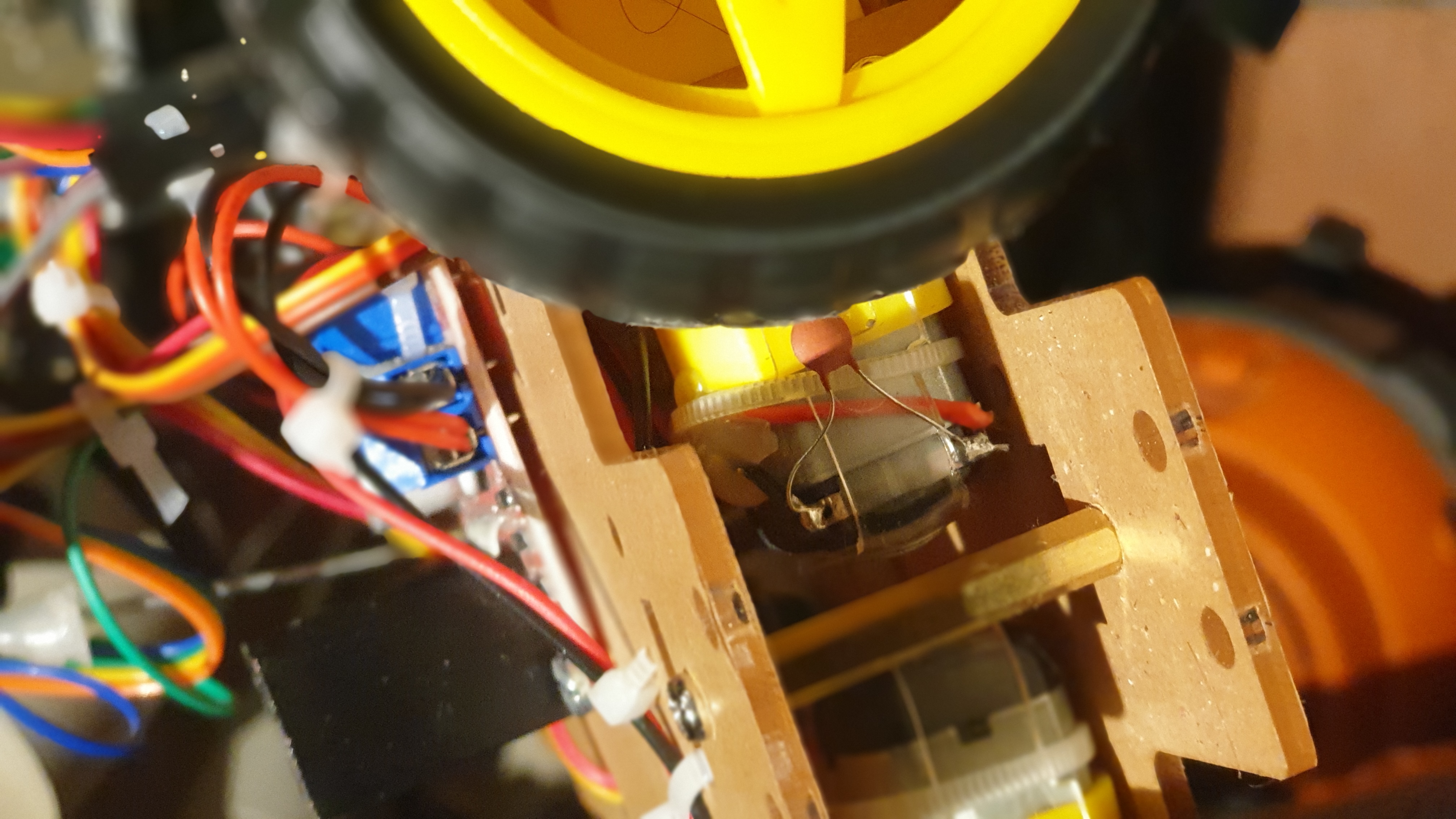
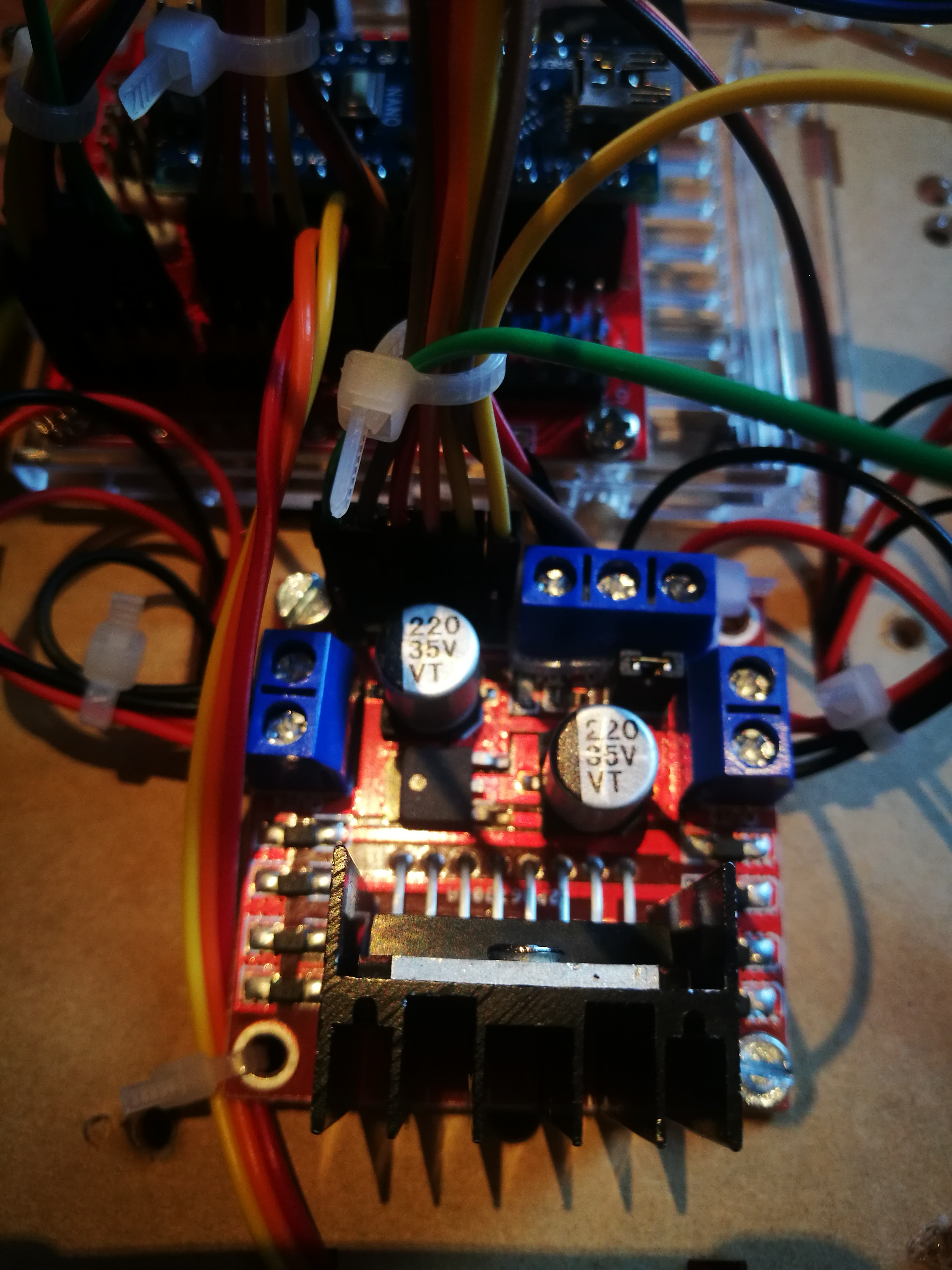
**แนะนำให้ใช้:** ใส่ตัวเก็บประจุเซรามิก 104 (.1uF) ขนานกับมอเตอร์ด้วยนะ จะได้ลดสัญญาณรบกวน มอเตอร์เดินนุ่มขึ้น ไม่กระตุก ห้ามช็อตนะตัวนี้!
**จุดสำคัญ!** หน้า IR LED สำหรับตรวจจับสิ่งกีดขวาง ต้องหันลงพื้น (Facing to Ground) นะครับพี่น้อง วางผิดทางมันไม่เห็นของ!
VIDEO
โหมดอัตโนมัติ.... พร้อมระบบหลบหลีกสิ่งกีดขวาง ดูมันวิ่งเองเลย!
VIDEO โหมดควบคุมด้วยมือ ผ่านการเชื่อมต่อ Bluetooth สั่งได้ตามใจเลย
VIDEO แอปพลิเคชันบน Android สำหรับควบคุมผ่าน Bluetooth เอาเลย สู้งานนะน้อง!
Hybrid Mechatronics: สมาร์ท 4WD โรเวอร์
Smart Obstacle / Bluetooth 4WD Car ตัวนี้คืออีโวชั่นสุดท้ายของชุดหุ่นยนต์พื้นฐานละ เป็นโปรเจกต์ "Hybrid" แบบเต็มๆ คือมันไม่ใช่รถอัตโนมัติล้วนๆ และก็ไม่ใช่รถบังคับล้วนๆ มันคือเทคโนโลยี Drive-by-Wire สมัยใหม่เลย—น้องขับผ่านแอปได้ แต่รถมันจะโอเวอร์ไรด์คำสั่งอันตรายจากน้องเพื่อความปลอดภัย
พี่ทำรถคันนี้เพราะเห็นว่าตามท้องตลาดมันมีแค่สองแบบ คือแบบหลบหลีกอัตโนมัติ กับแบบบังคับบลูทูธ ถ้าอยากแทรกบังคับเองตอนขับอัตโนมัติก็ทำไม่ได้ (หรืออาจจะมีแต่พี่ยังหาไม่เจอ :))
รถคันนี้ขับอัตโนมัติได้ด้วยเซนเซอร์วัดระยะ ถ้าน้องเชื่อมต่อบลูทูธมันจะสลับมาเป็นโหมดบังคับเอง แล้วน้องก็บังคับได้ พอตัดการเชื่อมต่อบลูทูธ มันก็จะกลับมาขับอัตโนมัติเองอีกรอบ
ตรรกะการผสานคำสั่งกับคณิตศาสตร์เซนเซอร์
โครงสร้างใน loop() ต้องไทม์ให้เป๊ะ
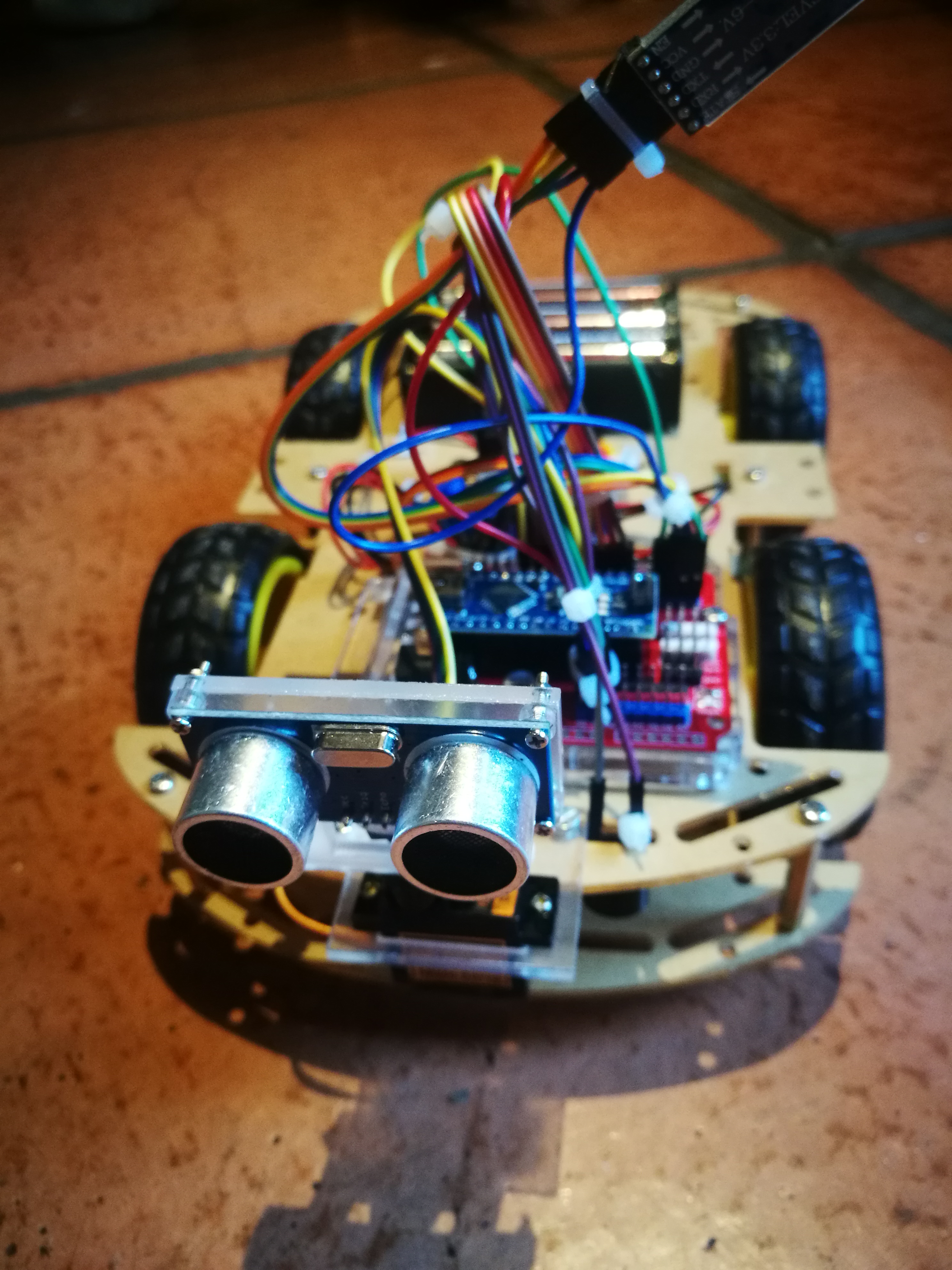
The Radar Check : เริ่มแรก เซนเซอร์ HC-SR04 ที่ติดอยู่กันชนหน้าจะตรวจวัดระยะThe Override Check : ถ้าระยะน้อยกว่า < 20cm Arduino จะยิงอินเตอร์รัพท์ มันจะสั่ง speed = 0 ให้มอเตอร์ทั้งสี่ตัวทันที, เปิดเสียงออดเตือน, และ เมิน คำสั่ง "เดินหน้า" จากมือถือน้องซะงั้น!The Listening Phase : ถ้าทางโล่ง (> 20cm) มันจะตรวจ Serial.read() เพื่อหาข้อมูลจากบลูทูธThe Execution : ถ้ามือถือส่งคำสั่ง "Forward" มาที่ L298N มันจะจ่ายกระแสให้มอเตอร์ทั้งสี่ตัวพร้อมกัน
มีเซนเซอร์ตรวจจับวัตถุสามตัว ตัวแรกคืออัลตราโซนิกที่จะทำงานทั้งในโหมดอัตโนมัติและโหมดบังคับเพื่อกันรถชนของข้างหน้า ด้านหลังเป็นเซนเซอร์ IR Obstacle จะทำงานเฉพาะตอนถอยหลังเพื่อกันชนของด้านหลัง และเซนเซอร์ IR Obstacle ด้านหน้าจะช่วยกันรถตกจากที่สูง ถ้าพื้นด้านหน้าไม่มีหรืออยู่ห่างเกินระยะที่เซนเซอร์ตั้งไว้ (แนะนำให้ติด LED ของเซนเซอร์ชี้ลงพื้น)
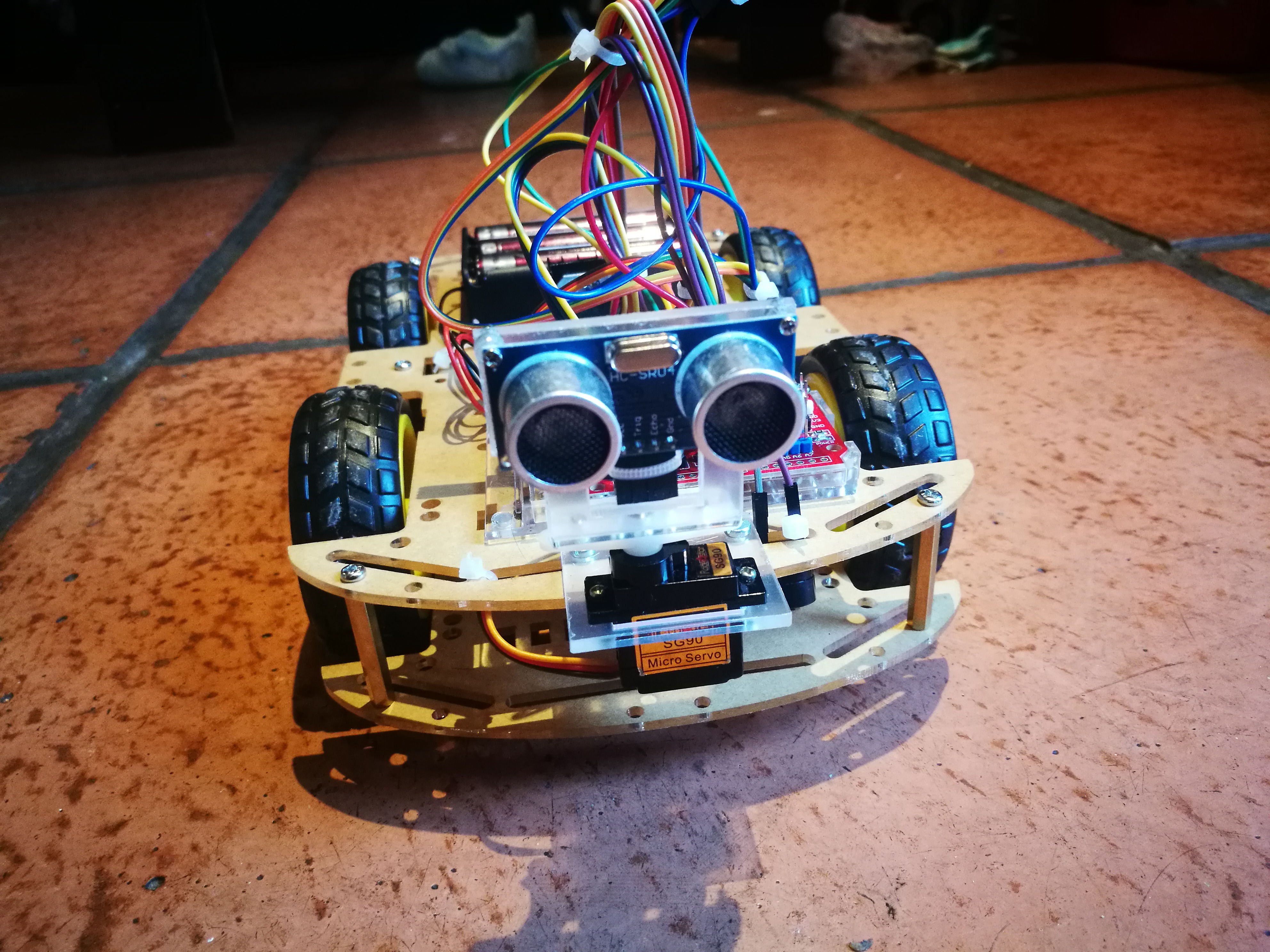
Pan/Tilt Scanning (อัพเกรดเสริม)
ถ้าอยากให้รถฉลาดสมชื่อ ให้ติดเซนเซอร์อัลตราโซนิกบน Micro Servo (SG90)
เวลารถหยุดอัตโนมัติเพราะเจอกำแพง มันจะ:
หันเซอร์โวไปทางซ้ายแล้ววัดระยะ (โล่ง 60cm)
หันเซอร์โวไปทางขวาแล้ววัดระยะ (มีสิ่งกีดขวาง 10cm)
Arduino จะตัดสินใจว่าทางซ้ายปลอดภัยที่สุด แล้วก็หมุนล้อเพื่อเดินหน้าต่อในโหมดอัตโนมัติ!
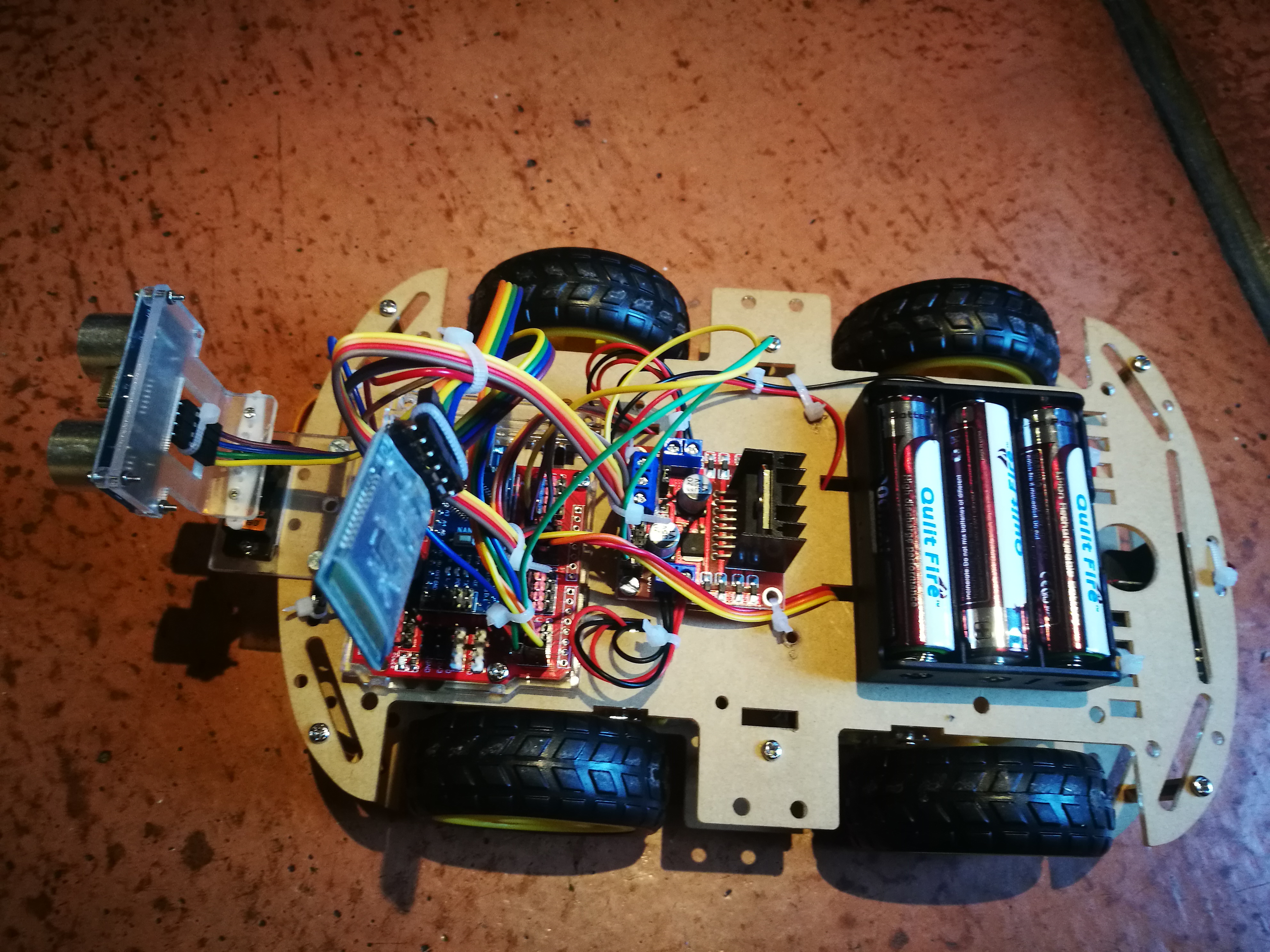
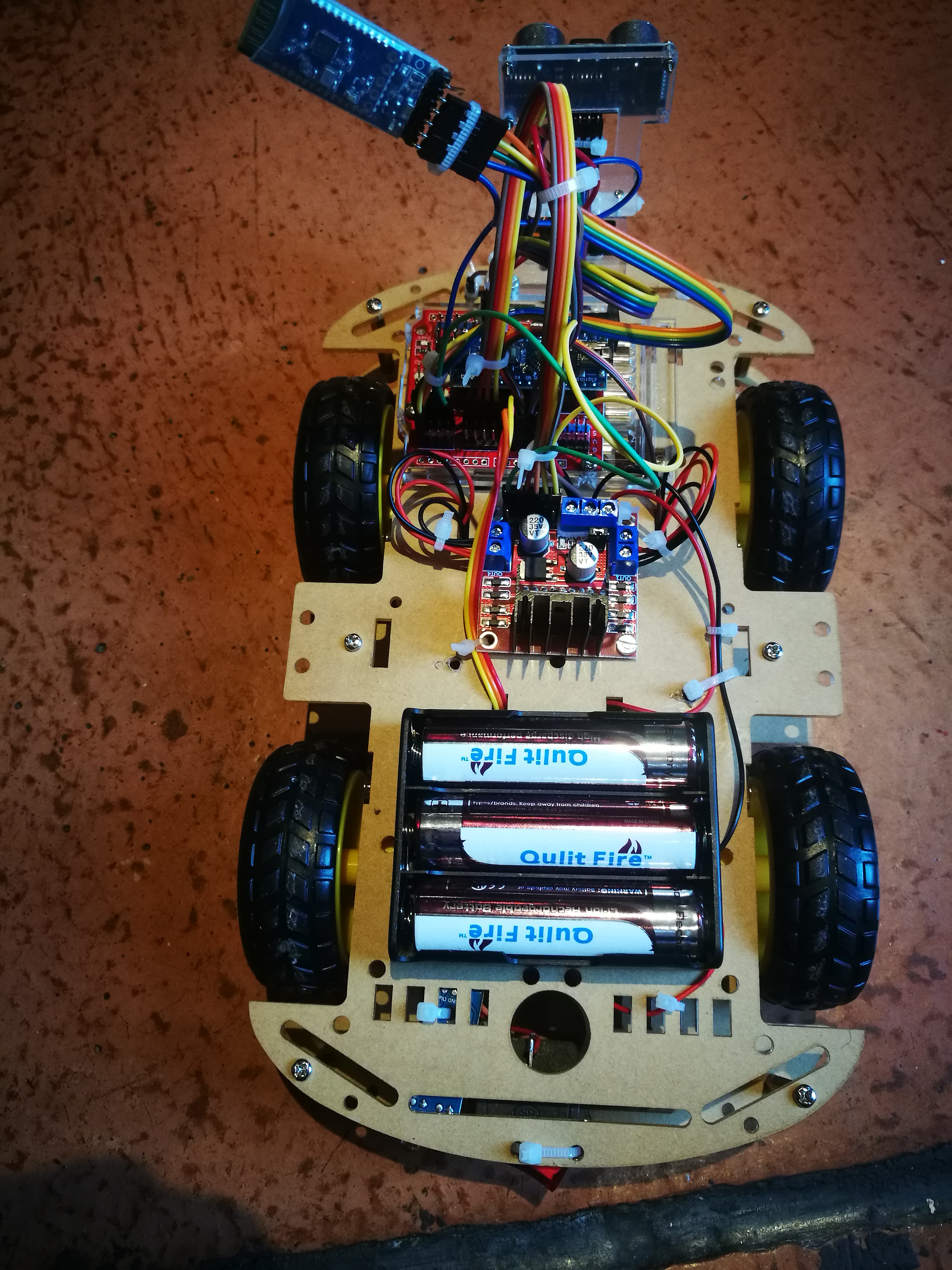
รายการฮาร์ดแวร์หลัก
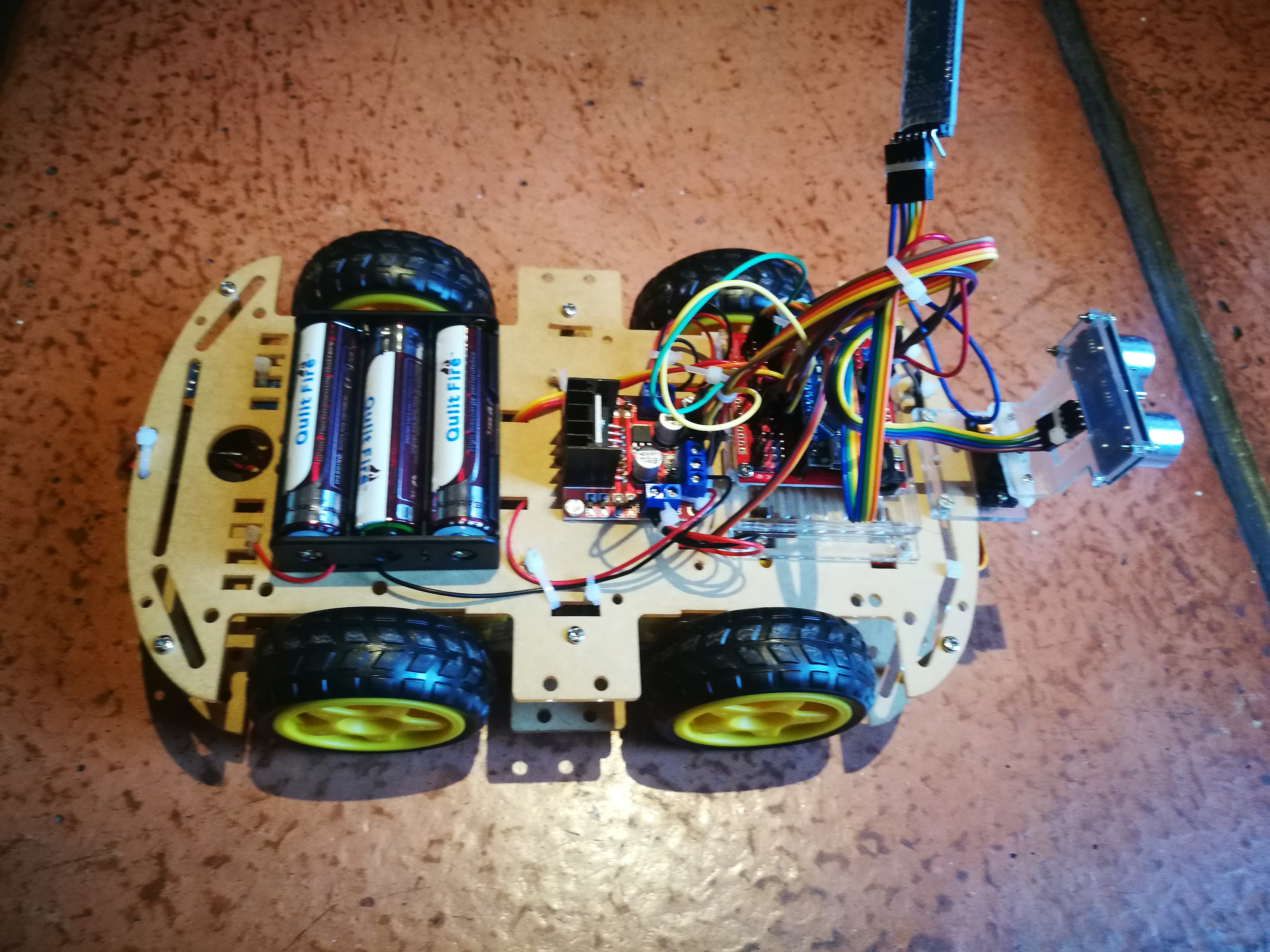
Arduino Uno/Mega : หัวใจหลักของระบบ HybridL298N Motor Driver Module : จำเป็นสำหรับจ่ายกระแสสูงๆ4WD Chassis Kit (มอเตอร์ 4 ตัว, ล้อ 4 ล้อ) HC-SR04 Ultrasonic Sensor HC-05 Bluetooth Module Dual 18650 Battery Pack : ต้องใช้ไฟอย่างน้อย 7.4 โวลต์ ถึงจะสู้กับสตอลล์เคอร์เรนต์ของมอเตอร์ทั้งสี่ตัวที่ทำงานพร้อมกันได้
หมายเหตุ: ปรับ Potentiometer บนเซนเซอร์ IR Obstacle เพื่อตั้งค่าระยะตรวจจับตามต้องการ และลองสลับสายไฟจาก D4-D7 ถ้ามอเตอร์ไม่เดินหน้าแต่ถอยหลังแทน
ข้อมูล Frontmatter ดั้งเดิม
apps:
- "1x Bluetooth RC Controller (Custom Android UI)"
- "1x Arduino IDE 2.0"
author: "adhome"
category: "Cars"
components:
- "1x Arduino Nano R3 (Robot Intelligence)"
- "1x Arduino Nano I/O Shield (Signal Distribution)"
- "1x HC-SR04 Ultrasonic Sensor (Spatial Perception)"
- "1x HC-05 Bluetooth Module (RF Command Link)"
- "1x Dual H-Bridge L298N Motor Driver (Power Stage)"
- "1x SG90 Micro-Servo (Articulated Scanning)"
- "2x IR Obstacle Sensors (Ground & Rear Safety)"
- "4x High-Torque DC Micro-Motors (Propulsion)"
- "4x Grippy Rubber Wheels (Traction)"
- "1x 4WD/2WD Robotic Chassis (Structural Hub)"
- "2x 18650 Li-ion Batteries (High-Discharge Power)"
- "1x Battery Holder, 18650 x 2"
- "1x Active Piezo Buzzer (Audio Telemetry)"
- "1x LED Status Indicator (Visual Feedback)"
description: "งานนี้คือรถ 4 ล้อเทพๆ ที่ใช้ Arduino เป็นสมอง วิ่งเองได้แบบอัตโนมัติด้วยเซนเซอร์หลบหลีก หรือจะคว้าโทรศัพท์มาบังคับเองแบบ Manual ผ่าน Bluetooth ก็ได้ งานง่ายแต่หล่อมาก วัยรุ่นต้องลอง!"
difficulty: "Intermediate"
documentationLinks: []
downloadableFiles:
- "https://projects.arduinocontent.cc/24280abd-e3d5-4278-b610-40f304cf9e47.ino"
- "https://projects.arduinocontent.cc/24280abd-e3d5-4278-b610-40f304cf9e47.ino"
encryptedPayload: "U2FsdGVkX1/jxPCS9iEDPeJnzu0yK0EIZEkPWQi2ISyFoERNS0enwCiJWcXCsWiJ0xc42m8A7M3+vDpcICFZKrnfz2NdYv2BpWpu+kx3TUmBfchf7fWRjVBzbSe5Gm6k"
heroImage: "https://cdn.jsdelivr.net/gh/bigboxthailand/arduino-assets@main/images/projects/4-wd2wd-auto-obstacle-avoidance-car-bluetooth-control-car-6acc89_cover.jpg"
lang: "en"
likes: 0
passwordHash: "babae62e12fba17c41cad7b72e05086bdd242b66b7c64b16cc76c2a9accdb472"
price: 2450
seoDescription: "An official guide to building the Arduino 4WD Obstacle Avoidance and Bluetooth Car. Learn to merge autonomous AI with manual RF control using Arduino Nano and L298N motor drivers."
tags:
- "obstacleavoidecar"
- "obstacle avoidance car"
- "auto pilot car"
- "obstacle avoidance car bluetoo"
- "arduino nano car"
- "2wd"
- "cars"
- "4wd"
- "bluetooth car"
title: "4 WD/2WD auto obstacle avoidance car / Bluetooth control car"
tools:
- "1x Logic-Grade Soldering Station"
- "1x Precision Screwdriver Set"
videoLinks:
- "https://www.youtube.com/embed/SbG4yOk0GMs"
- "https://www.youtube.com/embed/mruq8QJLWoo"
- "https://www.youtube.com/embed/QXNRWZF3dbw"
views: 7318