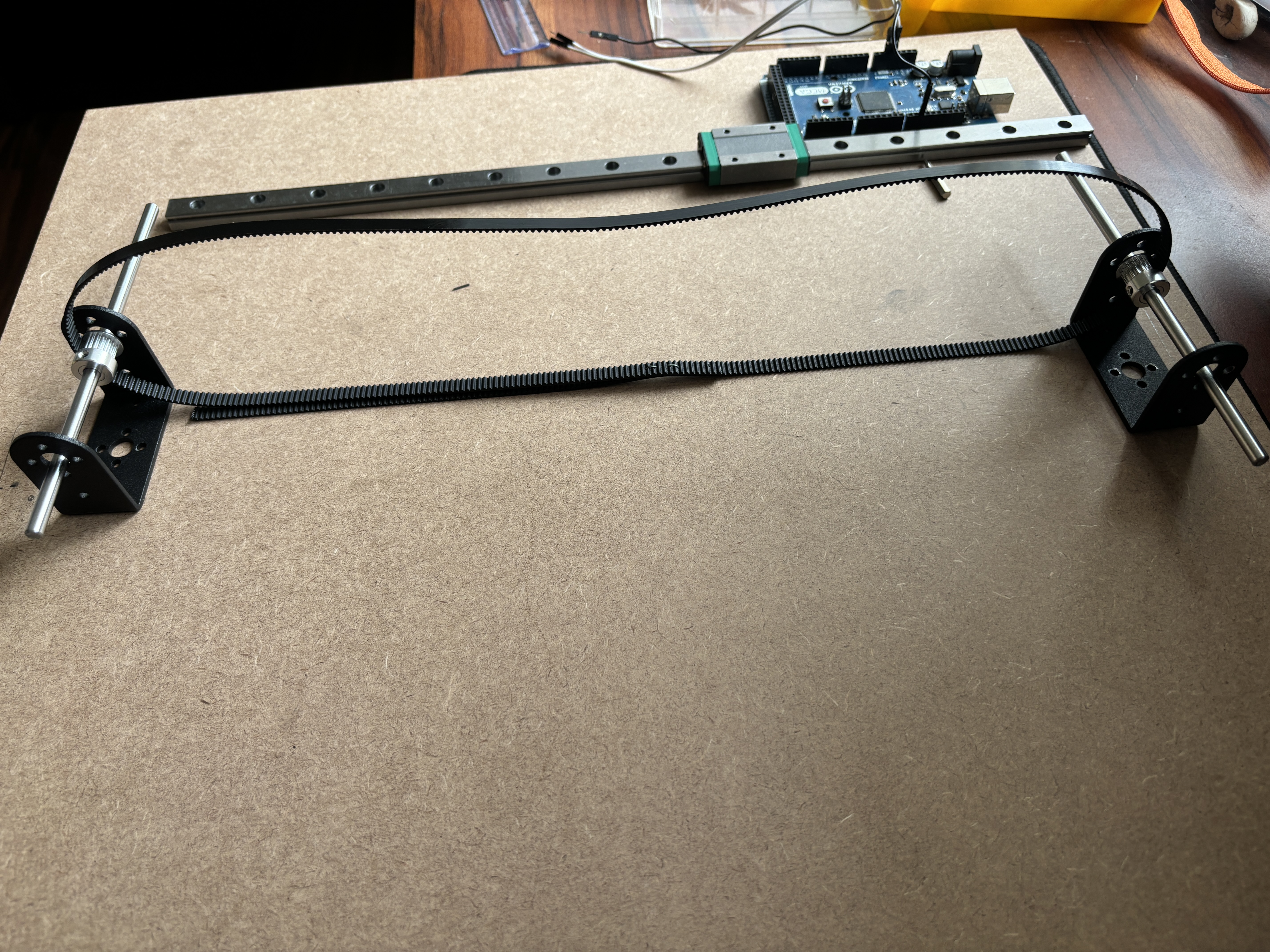
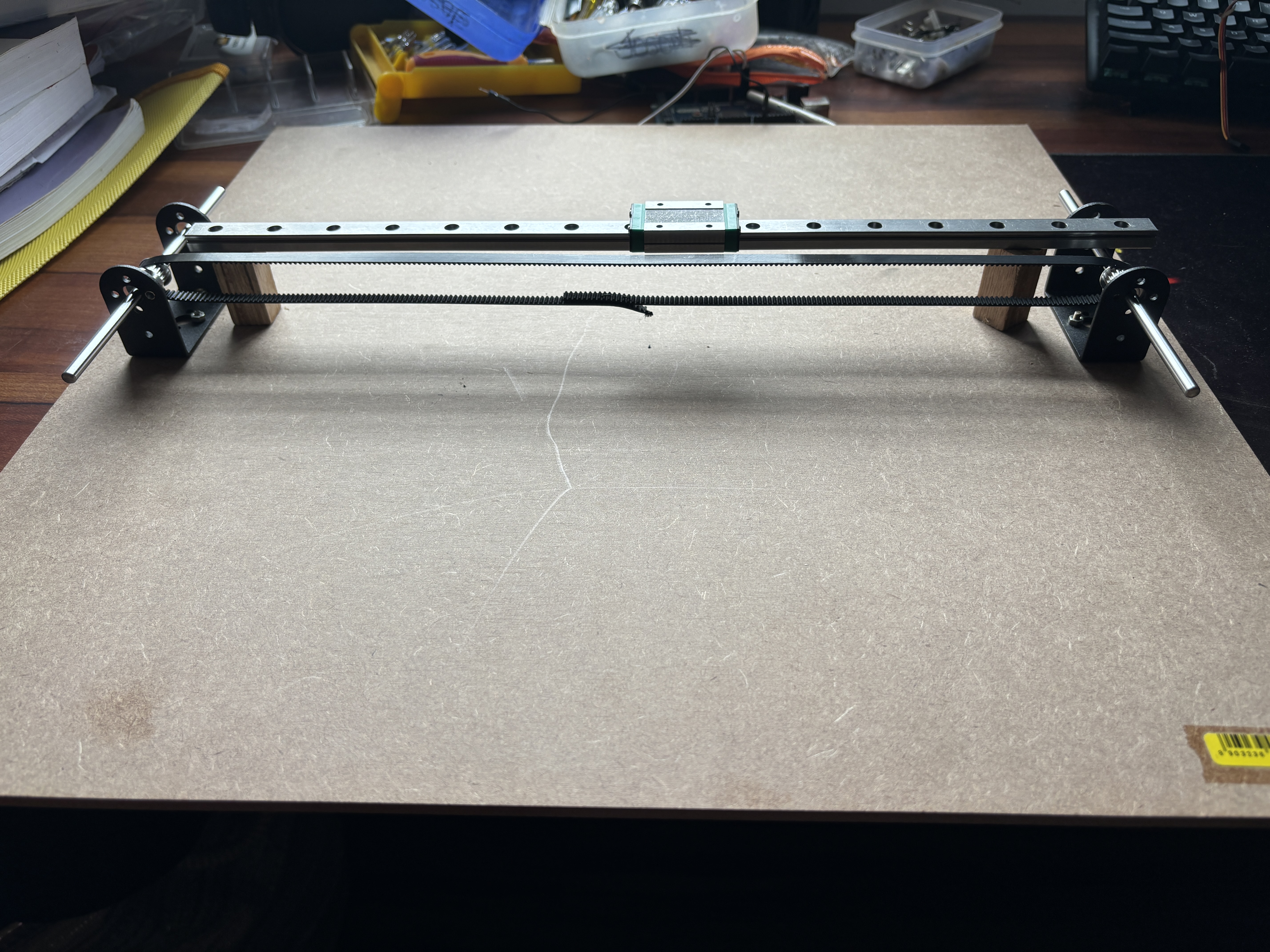
เจ้า Sliding Rail ตัวนี้ สร้างมาจาก Linear Rail พร้อม Slider (ชุดสำเร็จที่เอาไปทำเครื่อง CNC ได้เลย) กับพูลเลย์แบบมีเฟืองสองตัวที่ติดอยู่บนเพลาพูลเลย์ แล้วขับเคลื่อนด้วยสายพาน พูลเลย์แต่ละตัวก็มีแขนยึดสองข้างคอยพยุง แล้วยึดแขนยึดนั้นเข้ากับแผ่นฐานด้วยสกรู ตามที่เห็นในรูปข้างล่างนี้แหละ ตัวแขนกลหุ่นยนต์ก็จะถูกติดตั้งลงบน Slider ตัวนี้ในที่สุด
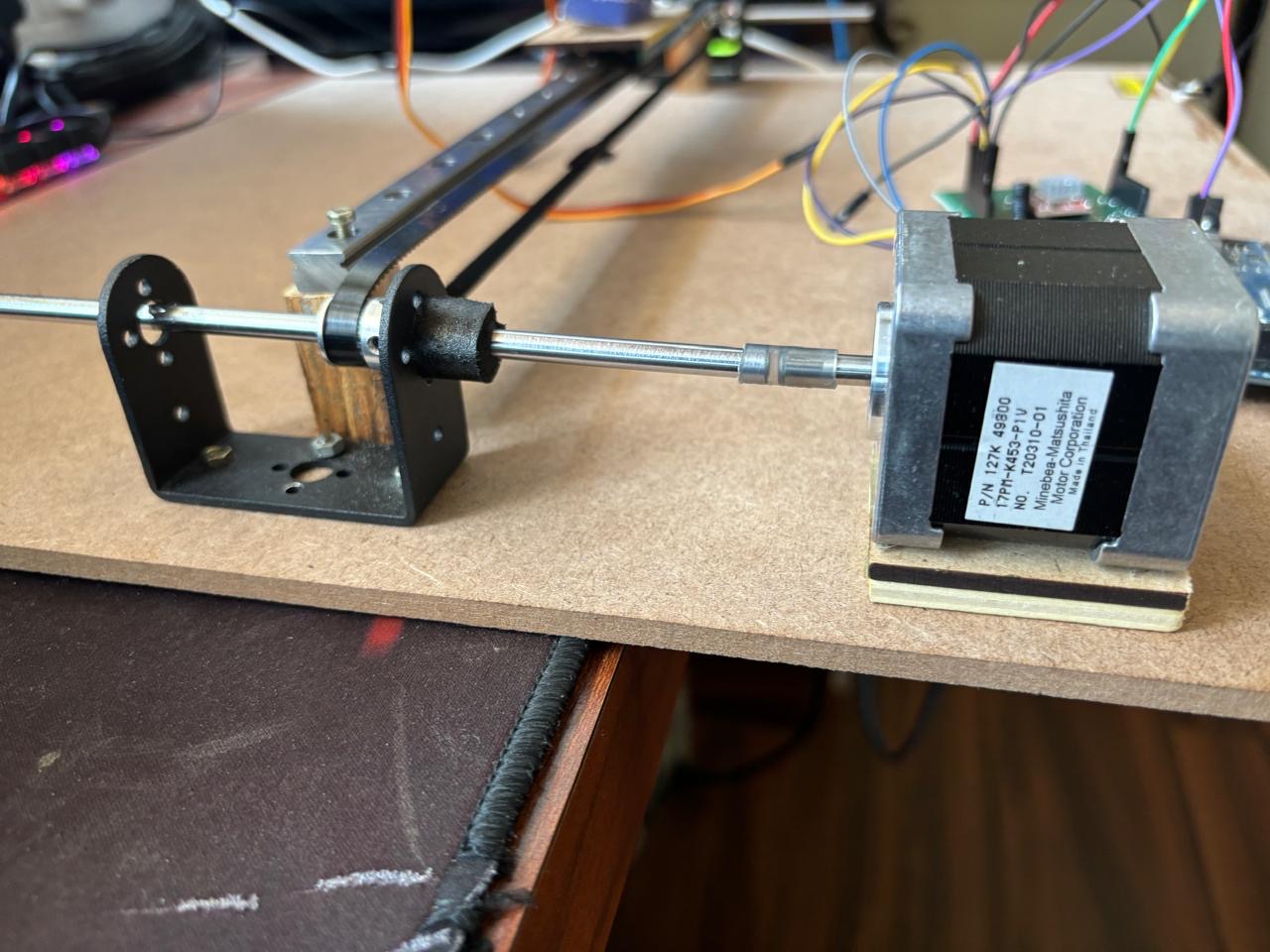
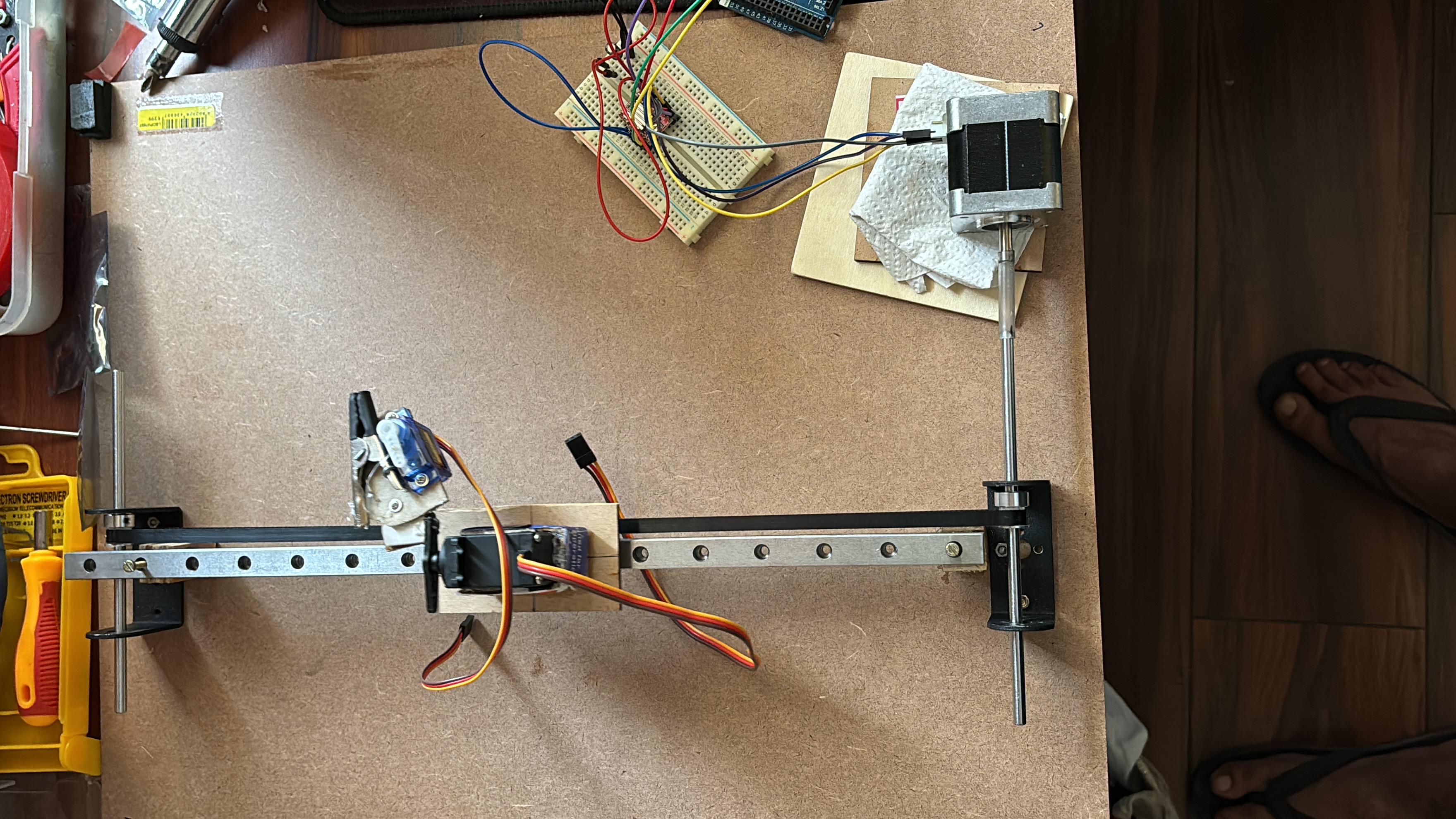
เชื่อมต่อมอเตอร์ Bipolar กับเพลาพูลเลย์ด้วยท่อพลาสติก
ตำแหน่งการติดตั้งพูลเลย์บนแผ่นฐาน
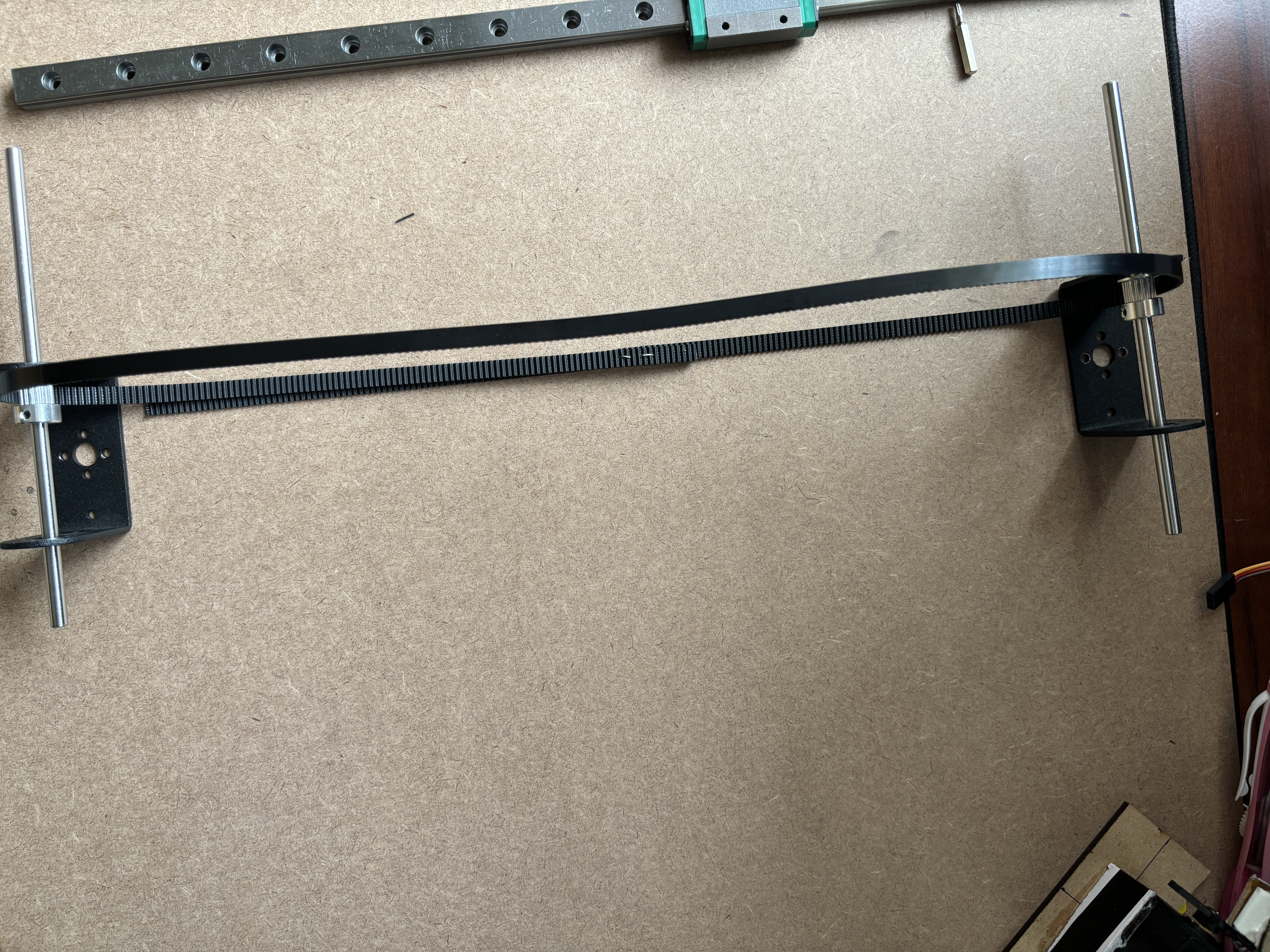
ภาพมุมมองจากด้านบนของระบบพูลเลย์ที่ประกอบเสร็จแล้ว
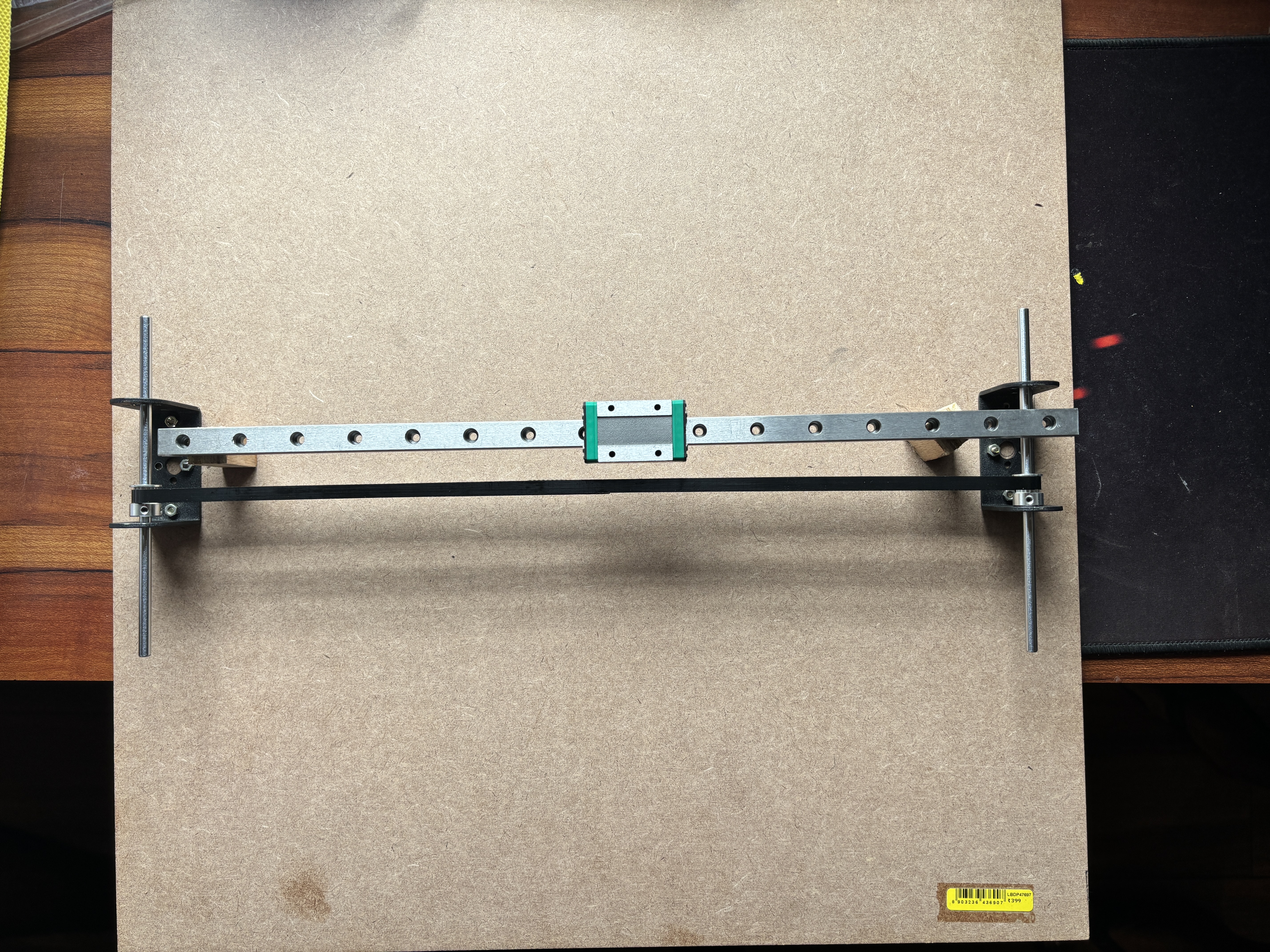
ภาพมุมมองจากด้านข้างของระบบพูลเลย์ที่ประกอบเสร็จแล้ว
[ความพยายามที่ล้มเหลว] กว่าจะได้กลไกนี้มา ก็ผ่านการล้มเหลวมาสองสามรอบแล้ว รอบแรกพยายามใช้แท่นวางสี่ล้อเพื่อติดตั้งแขนกล แต่ล้อมันไม่ยอมวิ่งตรงซะที ซึ่งเป็นเรื่องสำคัญมากสำหรับงานนี้ แม้แต่การบังคับให้ล้อวิ่งตามรางนำทางก็ยังล้มเหลวไม่เป็นท่า ความแม่นยำก็หายไปเลย
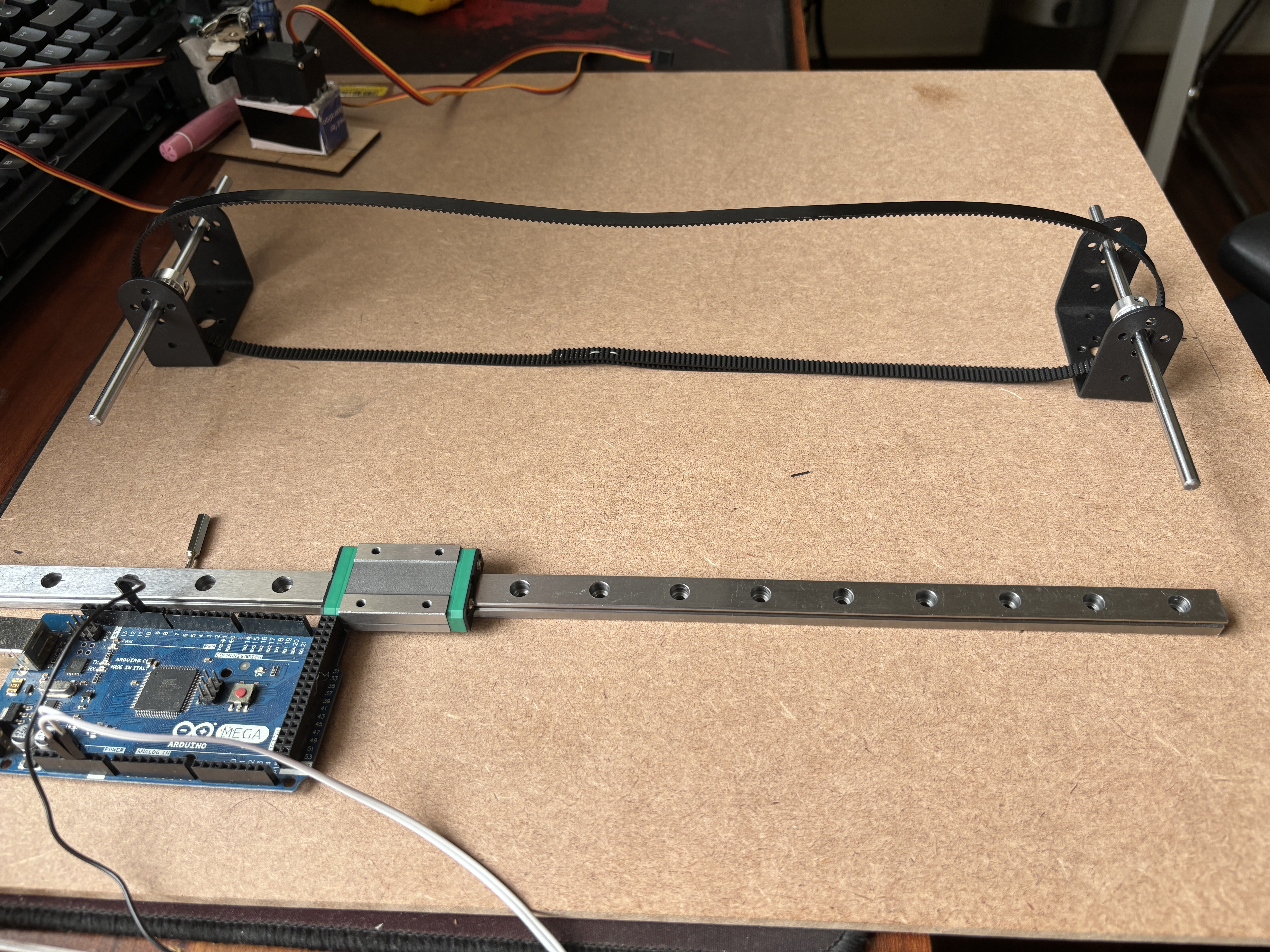
พอจัดวาง Linear Slide ให้ขนานกับสายพานได้แล้ว ก็ถึงเวลาติดตั้งแขนกลลงบน Slide ตัวนั้น จากนั้นก็ใช้ท่อพลาสติกเชื่อมต่อมอเตอร์สเต็ปเปอร์แบบ Bipolar เข้ากับเพลาพูลเลย์ด้านหนึ่ง พลังงานจากมอเตอร์ Bipolar ก็จะถูกส่งผ่านไปยังเพลาพูลเลย์เพื่อควบคุมให้สายพานเคลื่อนที่ไปข้างหน้าหรือถอยหลัง ส่งผลให้แขนกลเคลื่อนที่ไปมาอย่างลื่นไหล ตามที่เห็นในรูปข้างล่างนี้เลย
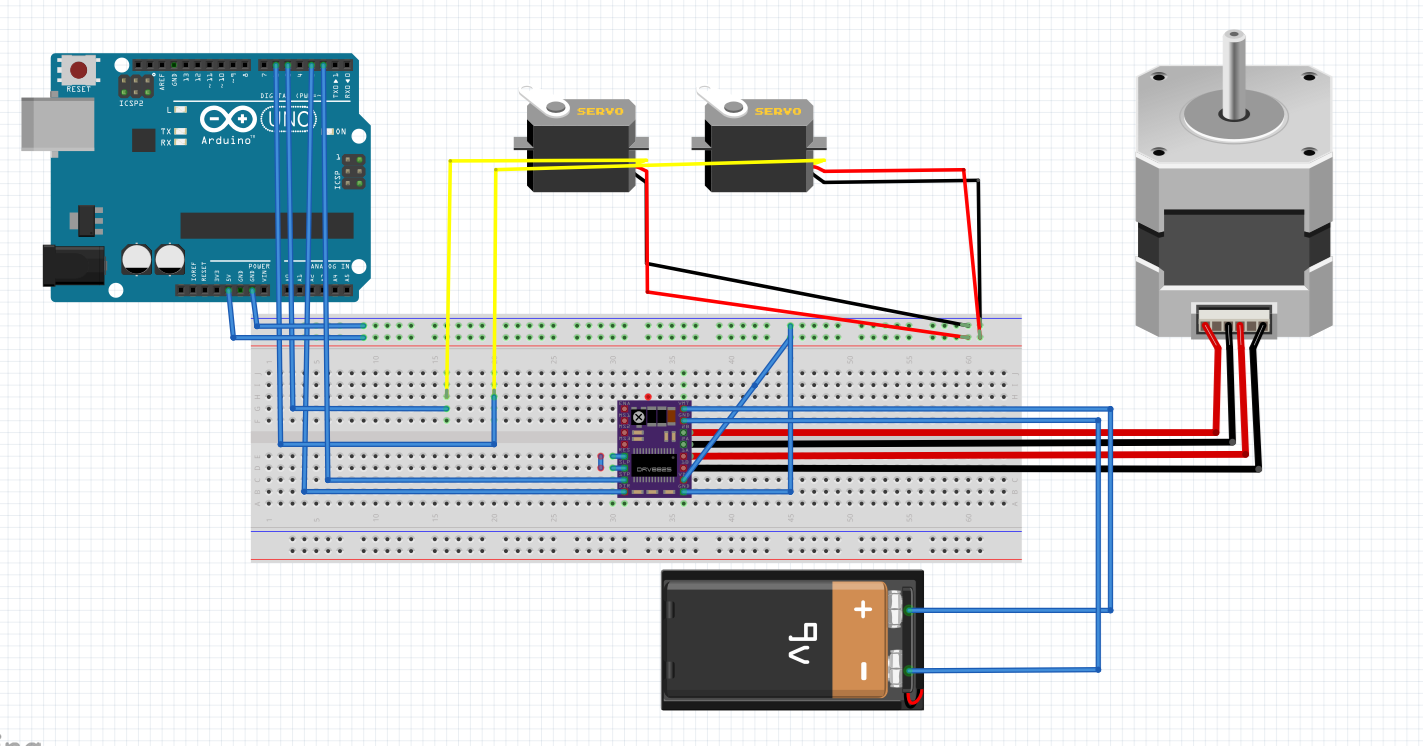
หลังจากนี้ ก็ถึงขั้นตอนการเชื่อมต่อมอเตอร์สเต็ปเปอร์ทั้งสามตัวเข้ากับ Arduino พร้อมกับ Driver สำหรับมอเตอร์ Bipolar ตัวนั้น ดูรายละเอียดการต่อวงจรทั้งหมดได้จากแผนภาพ Fritzing ด้านล่างเลยจ้า
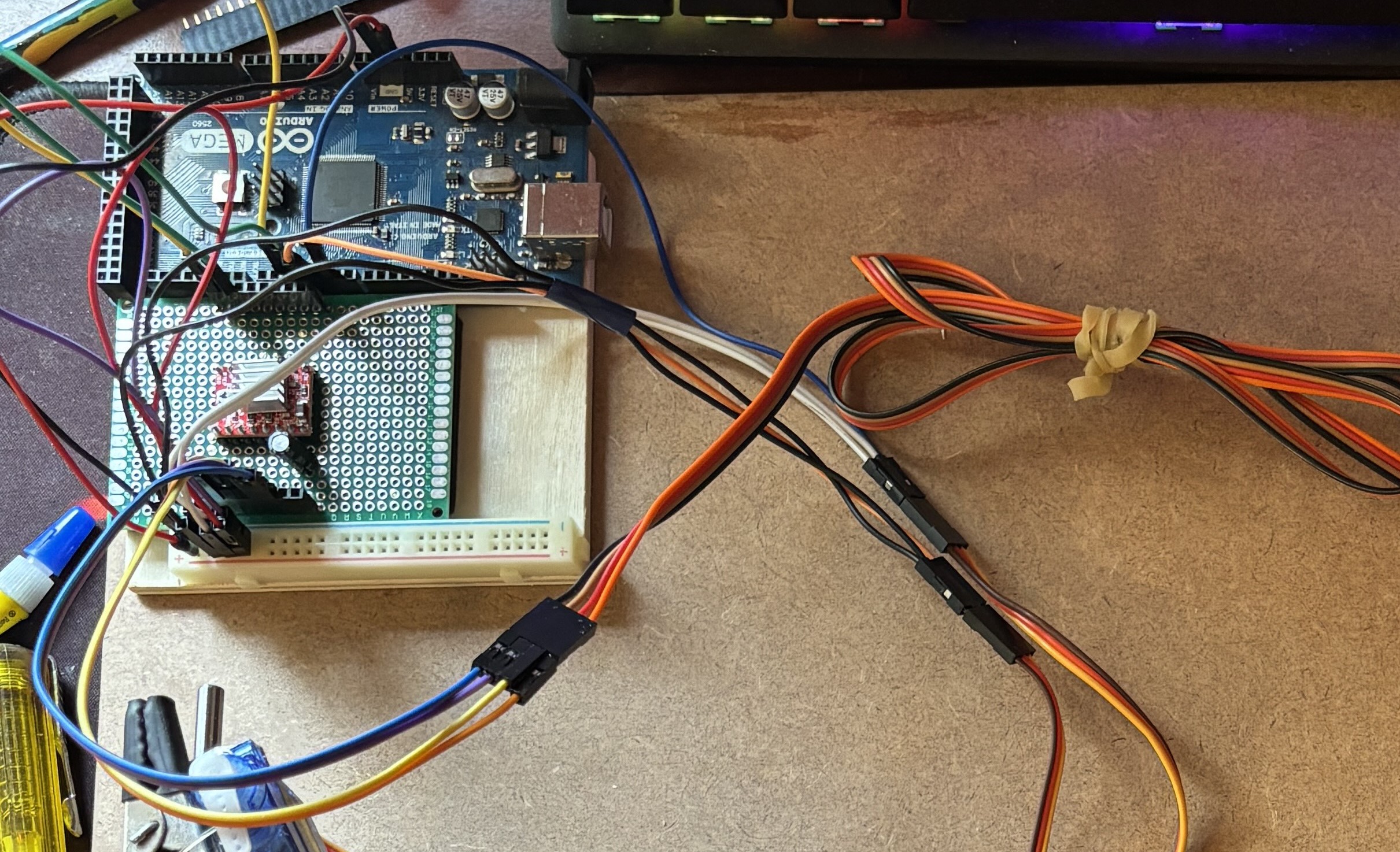
นี่คือแผนผังการต่อวงจรทั้งหมด:
Industrial Security QA
โปรเจกต์นี้สร้าง "Badging Bot" หรือหุ่นยนต์ทดสอบการแตะบัตร ขึ้นมาเพื่อจำลองการแตะบัตรนับพันๆ ครั้ง เพื่อทดสอบความน่าเชื่อถือของระบบควบคุมการเข้าออกในเชิงพาณิชย์
- Servo-Driven Swipe Arm: Arduino ควบคุม เซอร์โว MG995 แรงบิดสูง เพื่อกวาดแท็ก RFID ผ่านเครื่องอ่านบัตรจริงๆ Firmware จะทำการบันทึกจำนวนครั้งที่อ่านได้สำเร็จ ("Reads") เทียบกับที่อ่านไม่ได้ ("Timeouts")
- Variable Speed Stress-Test: ผู้ใช้สามารถกำหนดค่าความเร็วในการกวาดบัตร ("Swipe Speed") และช่วงเวลาหยุด ("Interval") ผ่าน Serial Monitor (โดยใช้ Arduino IDE 2.0) ได้ ช่วยให้นักวิศวะหาจุดลิมิตของประสิทธิภาพระบบได้
การรายงานข้อมูล
- การบันทึกความน่าเชื่อถือ: บอทจะบันทึกทุกความล้มเหลวลงในหน่วยความจำภายในของมัน พอครบ 24 ชั่วโมงของการทดสอบ มันจะให้ "เปอร์เซ็นต์ความสำเร็จ" และระบุว่ามีความล่าช้าทางกลไกหรือซอฟต์แวร์ในระบบรักษาความปลอดภัยตรงไหนบ้าง
ต้นแบบสุดท้ายที่ใช้งานได้:
หมายเหตุ: แม้ว่าพี่จะใช้ Arduino Mega ในโปรเจกต์นี้ แต่ Arduino Uno ก็ใช้ได้เหมือนกันนะน้อง อย่าไปช็อต
สิ่งที่ปรับปรุง:
- ใช้ไม้ทำแขนกล ทำให้มันแข็งแรงขึ้น จัดการจับและวางการ์ดได้แม่นยำกว่าเดิมเยอะ
- เพิ่มที่วางการ์ดจากกระดาษแข็งที่ตัดด้านข้างเป็นมุมเฉียง ช่วยให้การ์ดไหลลงช่องที่ถูกต้องได้ แม้ว่าจะวางไม่ตรงเป๊ะก็ตาม (มุกตั๊กๆ: มันคือฟีเจอร์อภัยโทษให้มือใหม่นั่นเอง)
- ใช้ wifi ควบคุมบอทจากที่ไหนก็ได้ สิ่งนี้จะตอบโจทย์จริงๆ คือทดสอบการ์ดได้โดยไม่ต้องอยู่หน้างาน สบายๆ