ชื่อโปรเจกต์: การเข้าถึงและแสดงผลภาพจาก Portenta Vision Shield - LoRa
ความสำคัญของ Remote Sensing และ Distributed Processing
ปัจจุบัน แอปพลิเคชันที่ต้องการเซ็นเซอร์ในพื้นที่ห่างไกลมีความจำเป็นอย่างยิ่งในการเข้าถึงข้อมูลโดยไม่ต้องเดินทางไปยังสถานที่จริง ซึ่งเป็นหัวใจสำคัญของการเติบโตของเทคโนโลยี Remote Sensing การจับคู่บอร์ดไมโครคอนโทรลเลอร์ประสิทธิภาพสูงอย่าง Arduino Portenta H7 เข้ากับ Vision Shield – LoRa ช่วยให้นักพัฒนาสามารถสร้างระบบสร้างภาพระยะไกลและส่งข้อมูลผ่านคลื่นวิทยุ LoRa ได้อย่างง่ายดาย
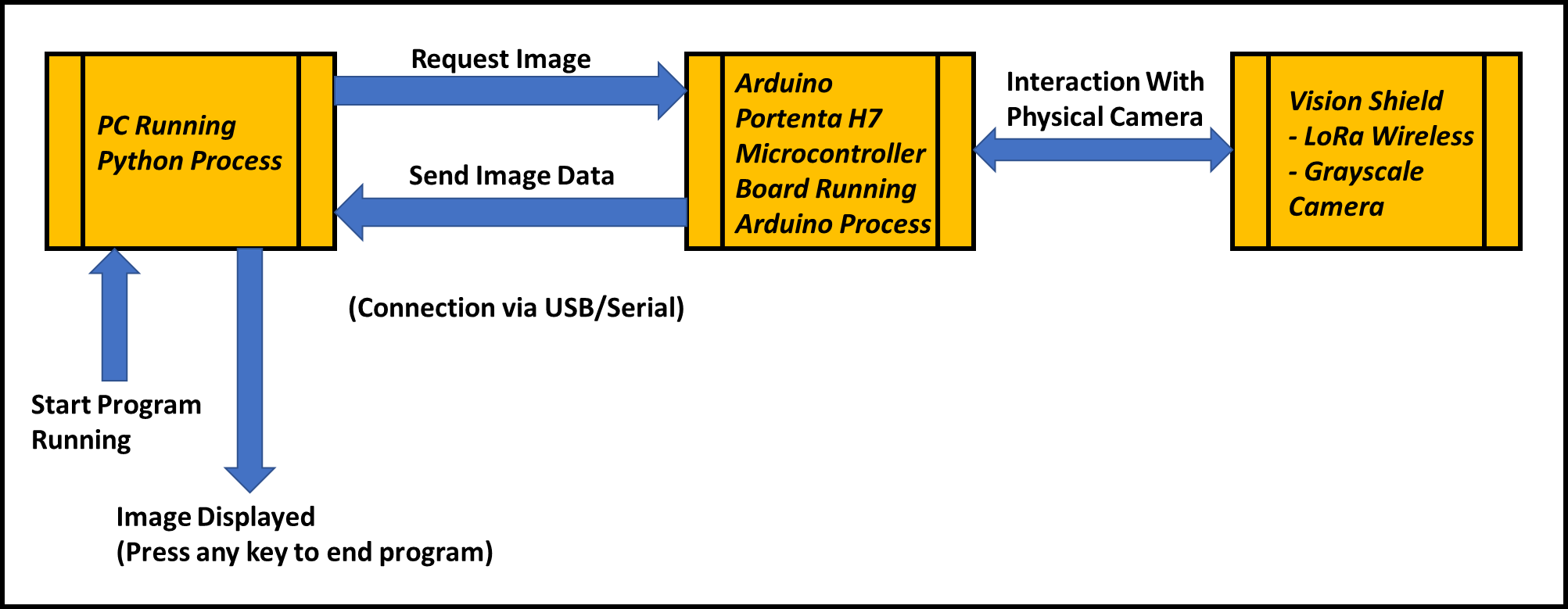
หัวใจสำคัญของโปรเจกต์นี้คือ Distributed Processing ในรูปแบบ Query/Response โดยที่ Arduino ทำหน้าที่เป็น endpoint Node รอคำสั่ง (Requests) เพื่อจับภาพและส่งข้อมูลกลับ ขณะเดียวกัน อีก Process หนึ่งที่ทำงานบนคอมพิวเตอร์ผ่าน Python v3.10 ทำหน้าที่เป็นผู้สั่งการ รับ Raw Data และประมวลผลเพื่อแสดงภาพบนหน้าจอ การเลือกใช้ Python ร่วมกับ IDE เช่น PyCharm Community Edition ในสภาพแวดล้อม Windows 11 (หรือ OSs อื่นๆ) ช่วยให้การจัดการข้อมูลขนาดใหญ่จาก camera sensor รวดเร็วและยืดหยุ่นกว่าการเขียนโปรแกรมบนไมโครคอนโทรลเลอร์เพียงอย่างเดียว
แม้ว่าโปรเจกต์นี้จะมุ่งเน้นที่การส่งข้อมูลผ่าน USB/Serial เพื่อการ Debugging และความเสถียรในเบื้องต้น แต่โครงสร้างพื้นฐานนี้ได้รับการออกแบบมาเพื่อรองรับการสื่อสารด้วย LoRa ในอนาคต ซึ่งจะทำให้สามารถส่งภาพแบบ Low Frame Rate ได้ในระยะทางหลายกิโลเมตรโดยไม่ต้องพึ่งพา LoRaWAN หรือ Third-party services ใดๆ
เจาะลึกฝั่ง Arduino (Embedded System Process)
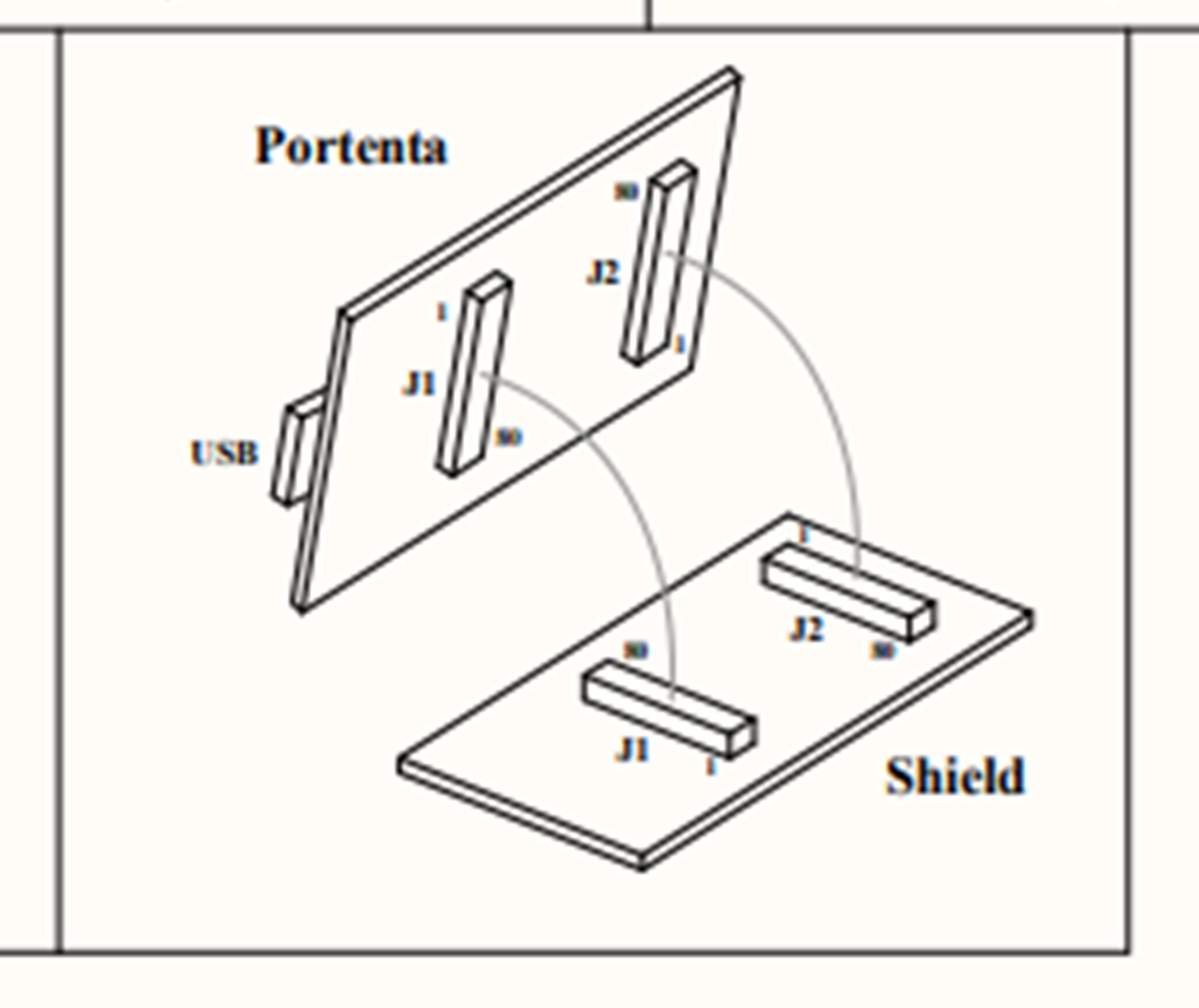
การประกอบ Hardware เริ่มต้นด้วยการเชื่อมต่อ Vision Shield เข้ากับบอร์ด Portenta H7 ผ่าน High-density Connectors หากคุณใช้เวอร์ชัน LoRa พื้นที่ทางด้านซ้ายของ connector J1 จะมีลักษณะเป็นรูปเกือกม้า ในขณะที่เวอร์ชัน Ethernet จะมี RJ45 port ติดตั้งอยู่แทน การเชื่อมต่อนี้ต้องใช้ความระมัดระวังเป็นพิเศษ เนื่องจาก pins มีความบอบบางสูง ควรออกแรงกดเบาๆ จนกว่าจะได้ยินเสียง "คลิก" ซึ่งแสดงว่า connector เข้าที่สมบูรณ์แล้ว
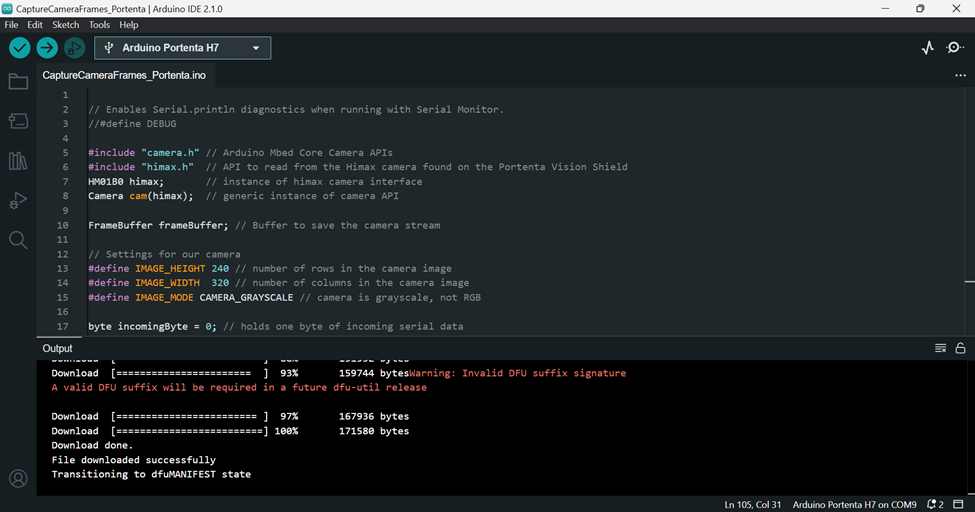
สำหรับการพัฒนา Software เราเลือกใช้ Arduino IDE v2.1 โดยติดตั้ง Portenta Core เวอร์ชันล่าสุด กล้องบน Vision Shield คือ Himax HM01B0 sensor ซึ่งเป็น Ultra-low Power Grayscale camera ที่ออกแบบมาโดยเฉพาะสำหรับแอปพลิเคชัน Computer Vision
Arduino Code Logic:
- Initialization: Code จะรัน
Camera.begin()เพื่อกำหนดค่า camera sensor โดยตั้งค่า Resolution และ pixel format ให้เหมาะสมกับ memory ของ Portenta H7 - Waiting for Command: โปรแกรมจะเข้าสู่สถานะ Idle รอรับสัญญาณ Byte พิเศษผ่าน Serial Port (USB) จากคอมพิวเตอร์
- Frame Capture: เมื่อได้รับคำสั่ง controller จะสั่งให้ Himax sensor จับภาพและจัดเก็บลงใน Frame Buffer
- Data Transmission: ข้อมูลภาพจะถูกส่งตรงในรูปแบบ Byte Stream ผ่าน
Serial.write()วิธีนี้มีประสิทธิภาพมากกว่าการแปลงเป็น String เนื่องจากช่วยลด Overhead และรักษาความเร็วในการส่งข้อมูล
เมื่ออัปโหลด code เสร็จสิ้น Portenta H7 ก็พร้อมที่จะทำงานได้ทันที โดยจะรอรับคำสั่ง Request จาก Python script ที่เราจะรันบน Host machine
Image Processing ด้วย Python (Host Process)
ในฝั่งคอมพิวเตอร์ (PC) เราใช้ Python ทำหน้าที่เป็น "สมองส่วนหน้า" สำหรับรับและแสดงผลข้อมูล Process นี้เริ่มต้นด้วยการเปิด Serial Port ที่ตรงกับตำแหน่งที่ Portenta H7 เชื่อมต่ออยู่ จากนั้นจึงส่งสัญญาณ trigger ไปยังบอร์ด
Python Script Logic:
- Serial Communication: ใช้
pyseriallibrary เพื่อสร้าง connection pipe ข้อมูลที่ไหลมาจาก Arduino จะเป็น Byte series ยาวๆ โดยไม่มี image structure - Data Reconstruction: เนื่องจากข้อมูลที่ได้รับเป็น Raw Bytes script จะใช้
numpyเพื่อ "Reshape" หรือจัดเรียง array แบบ 1-dimensional ที่ได้รับ ให้กลับไปเป็น array แบบ 2-dimensional (Width x Height) ตาม Resolution ที่ตั้งค่าไว้ของกล้อง - Image Rendering: เมื่อได้ pixel Matrix แล้ว เราจะใช้ OpenCV (
cv2) library เพื่อแสดงภาพใน Windows window วิธีนี้ช่วยให้เราสามารถประยุกต์ใช้ filters หรือ AI algorithms อื่นๆ ได้ทันทีในอนาคต
อย่าลืมติดตั้ง libraries ที่จำเป็นผ่าน requirements.txt file (เช่น pyserial, numpy, opencv-python) ใน Virtual Environment ของคุณ เพื่อการทำงานของระบบที่ราบรื่น
สรุปและมุมมองด้านวิศวกรรม
โปรเจกต์นี้แสดงให้เห็นถึงก้าวสำคัญในการทำความเข้าใจการทำงานร่วมกันระหว่าง Hardware ระดับสูงอย่าง Arduino Portenta H7 และการจัดการข้อมูลภาพ เราประสบความสำเร็จในการเข้าถึง camera sensor ควบคุม image Orientation และส่งข้อมูลได้อย่างแม่นยำผ่าน Serial Connection
การทำความเข้าใจ Data Structure ของ raw images จาก Himax camera ถือเป็นรากฐานที่สำคัญ หากเราต้องการขยายไปสู่การส่งข้อมูลผ่าน LoRa ซึ่งมี Bandwidth จำกัด เราอาจต้องพิจารณา Image Compression หรือ Edge AI analysis ก่อนส่งเฉพาะข้อมูลที่จำเป็น การเข้าถึง Header files อย่างละเอียด เช่น camera.h และ himax.h จะช่วยให้นักพัฒนาสามารถดึงประสิทธิภาพสูงสุดของ sensor ออกมาได้ ซึ่งจะเป็นหัวใจสำคัญของโปรเจกต์ถัดไปของเราในการสร้างระบบ Remote Vision ที่สมบูรณ์