AGRITECH: ลดภาระแรงงานคนในภาคเกษตร…
แรงจูงใจ:
เกษตรกรรมเป็นกระดูกสันหลังของประเทศเรา และมีความจำเป็นเร่งด่วนที่จะต้องยกระดับกระดูกสันหลังของเรา เรากำลังทำให้ภาคเกษตรกรรมแบบดั้งเดิมเป็นระบบอัตโนมัติโดยใช้เทคโนโลยีโดรนที่ทันสมัย โซลูชันทางเทคโนโลยีที่ออกแบบมาเพื่อป้องกันไม่ให้เกษตรกรสัมผัสโดยตรงกับสารกำจัดศัตรูพืช
โปรเจกต์นี้เป็นโซลูชันที่สมบูรณ์แบบสำหรับเทคนิคการทำฟาร์ม ซึ่งประกอบด้วยระบบตรวจสอบพืชผลอัจฉริยะ และ Agricopter (โดรนประเภท quad copter) เพื่อลดแรงงานในเทคนิคการทำฟาร์ม
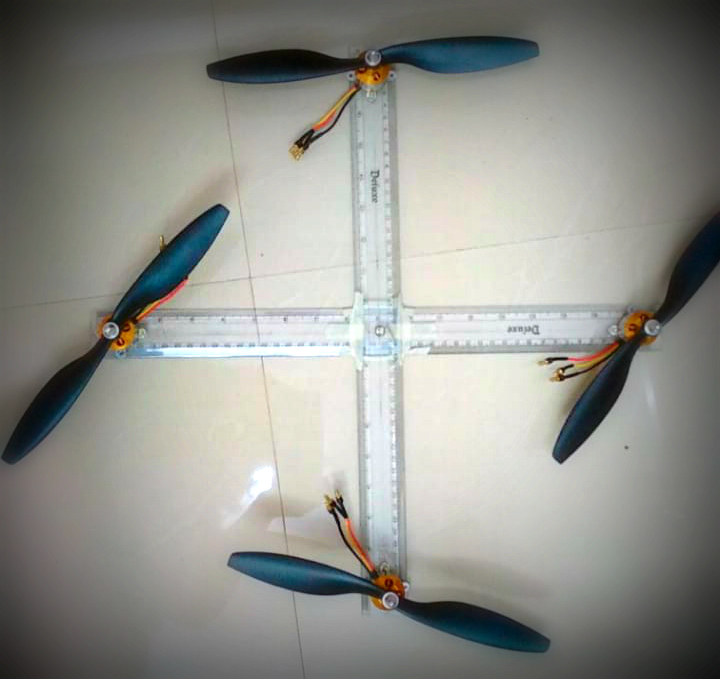
Smart Agricopter เป็นโดรน quad copter ที่สามารถบรรทุกน้ำและสารกำจัดศัตรูพืชได้ Agricopter มีเป้าหมายที่จะพ่นสารกำจัดศัตรูพืชได้เร็วกว่า 10 เท่า และมีความแม่นยำ 100% ด้วยต้นทุนที่เท่ากับการพ่นด้วยมือ
โปรเจกต์นี้ยังรวมถึงการวิเคราะห์สุขภาพพืชผลอย่างชาญฉลาด และรับรองว่ากระบวนการพ่นทั้งหมดเป็นระบบอัตโนมัติอย่างสมบูรณ์ และเกษตรกรจะไม่สัมผัสกับสารกำจัดศัตรูพืชเลย สุขภาพพืชผลจะถูกตรวจสอบ และเกษตรกรจะได้รับการแจ้งเตือนเมื่อใดก็ตามที่มีความจำเป็นต้องรดน้ำพืชผล และยังแจ้งการเปลี่ยนแปลงสภาพอากาศ ข้อมูลทั้งหมดนี้จะส่งไปยังโทรศัพท์ของเกษตรกร เพื่อลดแรงงานและนำเทคนิคการทำฟาร์มอัจฉริยะมาใช้
หลักการทำงาน:
โปรเจกต์นี้แบ่งออกเป็นสองส่วน – ส่วนแรกรับผิดชอบการตรวจสอบพืชผล ในส่วนนี้ เราใช้ temperature sensor, humidity sensor, methane sensor เพื่อทราบสภาพแวดล้อมของดิน นอกจากนี้เรายังใช้ soil moisture sensor เพื่อตรวจจับความจำเป็นในการรดน้ำพืชผลให้ตรงเวลา และส่งข้อมูลแบบ real time ไปยังผู้ใช้บนแพลตฟอร์มแอปพลิเคชัน ส่วนที่สองของโปรเจกต์จะจัดการกับสภาพเมื่อมีความจำเป็นต้องรดน้ำพืชผล ด้วยเหตุนี้เราจึงสร้าง Agricopter ซึ่งเป็นโดรน quad-copter ที่จะทำให้ระบบการรดน้ำด้วยมือเป็นแบบอัตโนมัติ โดยจะบรรทุกน้ำหรือสารกำจัดศัตรูพืชเพื่อฉีดพ่นบนพืชผลเมื่อจำเป็นและลดแรงงานลง ในตอนท้ายเรากำลังสร้างระบบจัดเก็บอัจฉริยะเพื่อจัดเก็บธัญพืชอย่างปลอดภัยและปกป้องธัญพืชจากสภาพอุณหภูมิที่รุนแรงโดยการตรวจสอบอุณหภูมิของโรงเก็บ และระบบยังรวมถึงระบบ anti-theft ด้วย
ขั้นตอนที่ 1:
ขั้นตอนที่ 2:

ขั้นตอนที่ 3:

ขั้นตอนที่ 4:

รายละเอียดทางเทคนิคเพิ่มเติม
ความแม่นยำในการทำฟาร์มอัตโนมัติ
โปรเจกต์นี้พัฒนาแพลตฟอร์มหุ่นยนต์เคลื่อนที่ที่ออกแบบมาเพื่อทำให้งานเกษตรกรรมซ้ำๆ เป็นระบบอัตโนมัติ เช่น การหว่านเมล็ด การกำจัดวัชพืช หรือการตรวจสอบพืชผล
- Chassis & Drive: สร้างบน chassis แบบ tracked หรือ 4WD ที่มี high-torque โดยใช้ L298N motor drivers เป็นตัวขับเคลื่อน
- Navigation Feedback: ใช้การรวมกันของ Ultrasonic sensors สำหรับการหลีกเลี่ยงสิ่งกีดขวาง และบางครั้งใช้ GPS module สำหรับการนำทางแบบ waypoint ในพื้นที่ขนาดใหญ่
การตรวจสอบเกษตรกรรมด้วย IoT
- Soil & Environment Nodes: ผสานรวม Soil Moisture และ Temperature/Humidity sensors
- Blynk Integration: ข้อมูลถูกส่งผ่าน WiFi ไปยัง smartphone dashboard ทำให้เกษตรกรสามารถตรวจสอบสุขภาพพืชผลและควบคุมการเคลื่อนที่ของหุ่นยนต์จากระยะไกลได้จากทุกที่