Description
Alpha V1 is the result of years of struggle with making custom made remote controllers for various robots. Finally, we decided that enough is enough.
Alpha V1 is one remote controller that can be easily customized and modified to be used with all sorts of robots and drones .The front and back plates are laser cut out of 4mm acrylic plates, so not only can you laser cut new ones, but also you can drill and cut the plates to add new switches, joysticks, etc.
On the firmware side, we have developed many libraries to make sure hardware customization would not require you to write a single line of code, instead you just need to activate them through the menus.
If you needed a feature that we have not implemented, Alpha V1 is open-source and you will have full access to development resources to go further.We are planning to crowdfund Alpha V1, so signup in our website to get notified at launch or follow our social media pages for more pictures and updates.
Website: https://www.craetech.com/alpha-v1
Instagram: https://www.instagram.com/craetech/
Facebook: https://www.facebook.com/craetech/
History
We used to build robots for most parts of our undergraduate degree and it was always a struggle to get a remote controller that satisfies all of our needs. It was in our second year (2013), when we first started to think about making our own remote controller.
Back then, our knowledge was very limited so we made a tailored remote controller for one of our projects. We liked the end results but there were many short comings. The trend of designing a tailored remote controller for each project went on and on till 2015.
Eventually, we graduated and after few years we decided to work on something interesting in 2017. While going through all of our previous experiences we noticed market still does not offer a solution for our remote controller problem, so we started to work on a new open-source remote controller.
We named it "Alpha V1" and the project was initiated with few core values:
- Open-Source Everything
- Ease of Customization and Modification
After 2 years of brain storming, prototype and firmware development, Alpha V1 is very close to becoming a product in market.



Features
Designed for Robotics Applications
- Ease of Modification
- Code-Free Customization
- Simple User Interface
Superior Communication System Compare to RC Transmitters
- 2-Way Digital Communication
- Channels' Flexibility (18 channels at 100Hz, 36 channels at 50Hz or 72 channels at 25Hz)
- Advanced and Flexible Telemetry System
Open-Source All the Way
- Open-Source Software
- Open-Source Hardware
- Arduino-Compatible
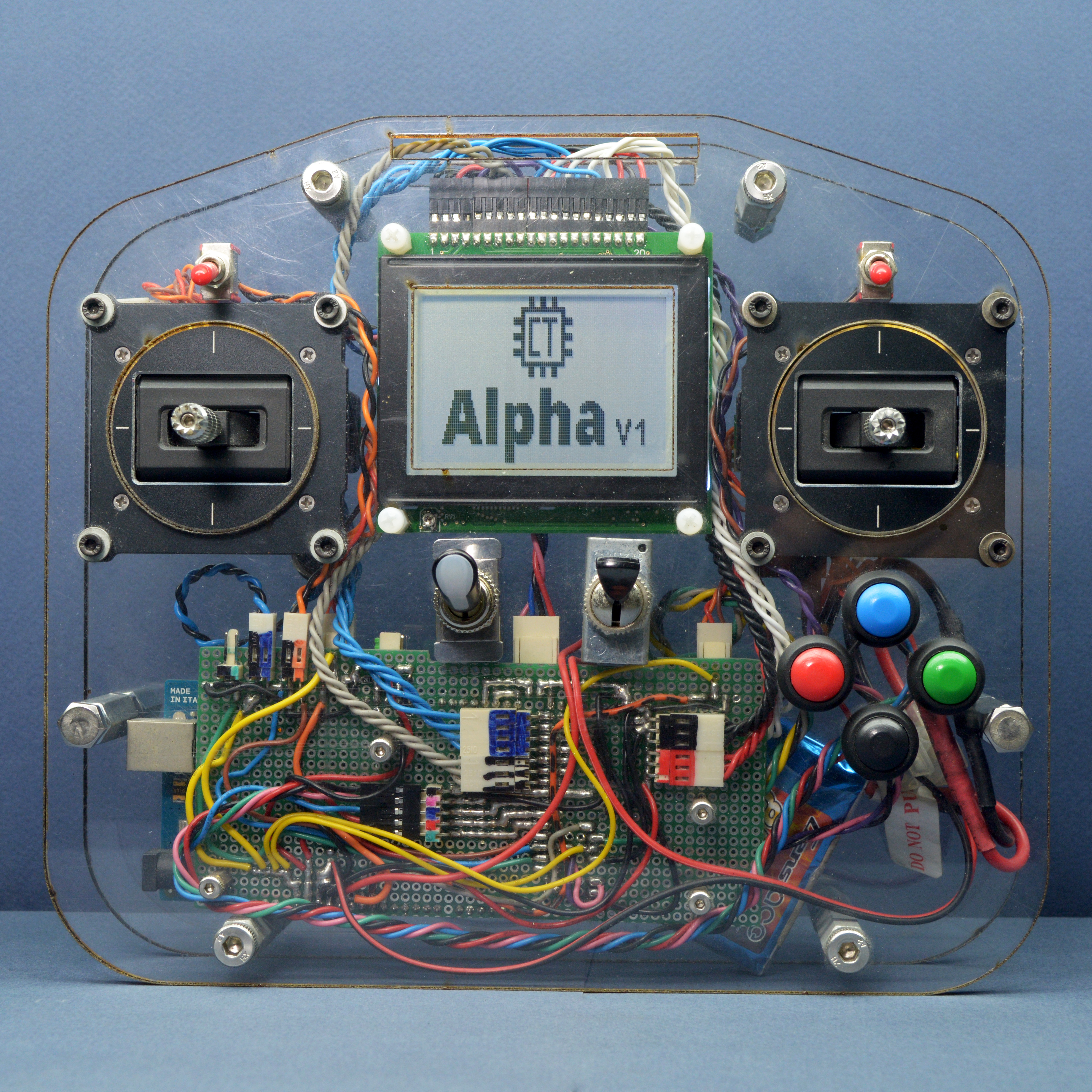
Alpha V1 Multiple Views



Possibilities with Alpha V1: Adding different input devices easier than ever before


*This project is ongoing so stay tuned for more updates.
🛠️ เจาะลึกเบื้องหลังการทำงาน (Deep Dive / Technical Analysis)
Buying a commercial $200 RC remote entirely locks the developer out of the core firmware! You absolutely cannot add a bespoke Autopilot button physically. The Alpha V1 Remote completely shatters this limitation! By fundamentally building the controller from scratch natively using an Arduino Nano and the terrifyingly powerful NRF24L01 2.4GHz Transceiver, you own the entire radio broadcast architecture! The system scans two complex analog physical joysticks and 6 tactical switches, packing them aggressively into an incredibly dense 32-byte data struct, and blasts them across 1000 meters of open air directly into your robot, drone, or RC car receiver at 2 Megabits per second!
Structuring the Radio Transmission Payload (struct)
You cannot just send "Left" and "Up" lazily via Serial strings ("X128 Y255"). This will violently lag your drone, causing a catastrophic crash!
- NRF24 radios utilize explicit native Payload Packets.
- A
structacts mathematically like an incredibly dense backpack. You cram exactly theX,Y,Throttle, andYawintegers straight into the struct. - The
<RF24.h>library takes that entire 16-byte backpack and literally throws it over the 2.4GHz radio wave as a single contiguous block of pure binary data!
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
RF24 radio(9, 10); // Elite CE, CSN SPI mapping!
const byte address[6] = "00001"; // NRF24 Transmit Pipe!
// The incredibly dense, lag-free Data Payload!
struct DataPacket {
byte joyLeftX;
byte joyLeftY;
byte joyRightX;
byte joyRightY;
byte auxButtonA;
};
DataPacket remoteData; // Instantiate the payload object!
void loop() {
remoteData.joyLeftY = map(analogRead(A0), 0, 1023, 0, 255); // Read Joystick natively!
remoteData.joyRightY = map(analogRead(A2), 0, 1023, 0, 255);
// Blast the entire struct over the RF gap essentially instantaneously!
radio.write(&remoteData, sizeof(DataPacket));
}
The 3.3V Power Collapse In NRF24 Devices
The absolute most common catastrophic failure of the NRF24L01 is power deficiency.
- The chip requires 3.3 Volts. If you wire it to the Arduino Uno's heavily overloaded 3.3V pin, the radio will permanently stutter, reset, or silently drop packets causing total drone annihilation!
- You MUST utilize an explicitly dedicated 3.3V AMS1117 Linear Voltage Regulator Module or splice a
10µFor100µFElectrolytic Capacitor violently straight across the NRF24'sVCC/GNDpins to act as a physical buffer against the massive transmission current spikes!
Physical Tactical Enclosure Parts
- Arduino Nano (Its USB interface allows rapid on-the-fly firmware changes in the field without disassembling the shell).
- NRF24L01+PA+LNA Transceiver (The PA+LNA version features a huge black external antenna pushing the range from 100m to over 1000m completely natively!).
- Dual Analog Thumbstick Modules (Standard PS2-style 10K-Ohm tactile precision units).
- Multiple SPDT Toggle Switches (For complex macro sequences like Flaps, Gear, or autonomous mode shifting).
- 1x 18650 Li-Po Battery & TP4056 Charger Module (An elite custom PCB/Breadboard matrix to regulate the intensive power requirements locally).