Arduino 4WD Rover ควบคุมด้วย Bluetooth โดยอุปกรณ์ Android
โปรเจกต์หุ่นยนต์ 4WD Rover ควบคุมผ่าน Bluetooth ด้วย Arduino
ยินดีต้อนรับสู่โปรเจกต์การสร้างหุ่นยนต์ขับเคลื่อนสี่ล้อ (4WD Rover) ที่ขับเคลื่อนด้วยไมโครคอนโทรลเลอร์อัจฉริยะ Arduino โปรเจกต์นี้ไม่ใช่แค่การประกอบของเล่นทั่วไปเท่านั้น แต่เป็นประสบการณ์การเรียนรู้พื้นฐานในด้าน Embedded Systems ที่รวมเอา Mechanics, Power Electronics และ Wireless Communication เข้าไว้ด้วยกัน
หุ่นยนต์ตัวนี้ถูกออกแบบมาให้ควบคุมผ่านสมาร์ทโฟนหรือแท็บเล็ต Android โดยใช้การสื่อสารแบบ Bluetooth จุดเด่นสำคัญของโปรเจกต์นี้คือความสามารถในการควบคุมความเร็วของมอเตอร์ได้อย่างแม่นยำด้วยเทคนิค PWM (Pulse Width Modulation) และยังสามารถบังคับทิศทางของหุ่นยนต์ได้ด้วยการเอียงอุปกรณ์มือถือของคุณ โดยใช้ Accelerometer (เซ็นเซอร์วัดความเร่ง)
หัวใจของโปรเจกต์นี้คือ Arduino Sketch ซึ่งเป็น Open Source และมีคำอธิบายที่ชัดเจนเกี่ยวกับ Communication Protocol สิ่งนี้ช่วยให้คุณสามารถขยาย Code เพื่อควบคุมหุ่นยนต์ประเภทอื่น ๆ หรือปรับแต่งฟังก์ชันการทำงานได้ตามต้องการ
Step 1: ส่วนประกอบที่จำเป็น (Bill of Materials)

ในการสร้าง 4WD Rover คุณจะต้องเตรียมส่วนประกอบพื้นฐาน ซึ่งหาซื้อได้ง่ายจากร้านค้าอิเล็กทรอนิกส์ทั่วไปหรือร้านค้าออนไลน์ ส่วนประกอบหลักที่เลือกมีคุณสมบัติทางวิศวกรรมที่เหมาะสมดังต่อไปนี้:
- ชุดโครงหุ่นยนต์ 4WD Robot Chassis Kit: ประกอบด้วยแผ่นฐาน Chassis, DC Gear Motors 4 ตัว และล้อ 4 ล้อ ชุดนี้ออกแบบมารองรับแรงดันไฟฟ้าสูงสุดประมาณ 12V
- ตัวอย่างแหล่งซื้อ: Robotik Center, RobotShop หรือค้นหา "4WD chassis robot arduino" บน Shopee/Lazada/Ebay
- บอร์ด Microcontroller: Arduino Uno R3 หรือ Arduino Leonardo ซึ่งทำหน้าที่เป็น Central Processing Unit
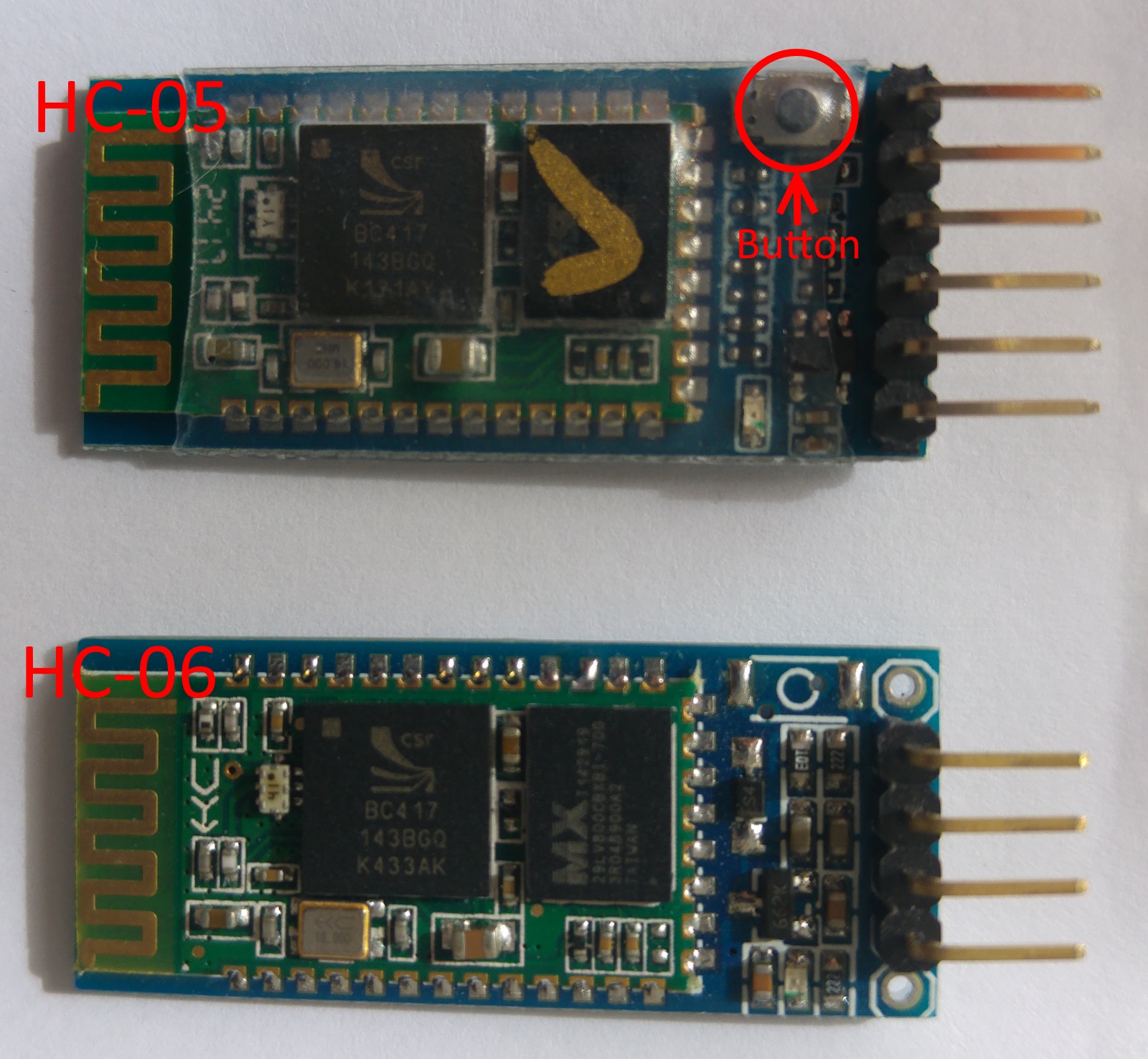
- โมดูล Bluetooth: HC-05 หรือ HC-06 สำหรับการส่งข้อมูลแบบไร้สายผ่าน Serial UART
- โมดูลขับเคลื่อนมอเตอร์ L298N Dual H-Bridge Motor Driver Module: เป็นส่วนประกอบ Power Electronics ที่สำคัญมาก ซึ่งจะแปลงสัญญาณควบคุมแรงดันต่ำจาก Arduino ให้เป็นกระแสไฟฟ้าสูงเพื่อขับเคลื่อนมอเตอร์ทั้ง 4 ตัว (แยกเป็น 2 ฝั่ง: ซ้ายและขวา)
- แหล่งจ่ายไฟ: แบตเตอรี่ Li-ion ขนาด 3.7V จำนวน 3 ก้อน (ต่ออนุกรมกันเพื่อให้ได้ประมาณ 11.1V) หรือแบตเตอรี่ Li-Po ขนาด 11.1V 1200mAh ขึ้นไป เพื่อจ่ายไฟให้เพียงพอสำหรับการขับเคลื่อนมอเตอร์และเลี้ยงบอร์ดควบคุม
- อุปกรณ์เสริม: DC Jack Plug, Resistor 1k Ohm (สำหรับรักษาระดับ Signal Voltage), Flat Cable และ Heat Shrink Tubing
Step 2: แผนภาพ Schematic
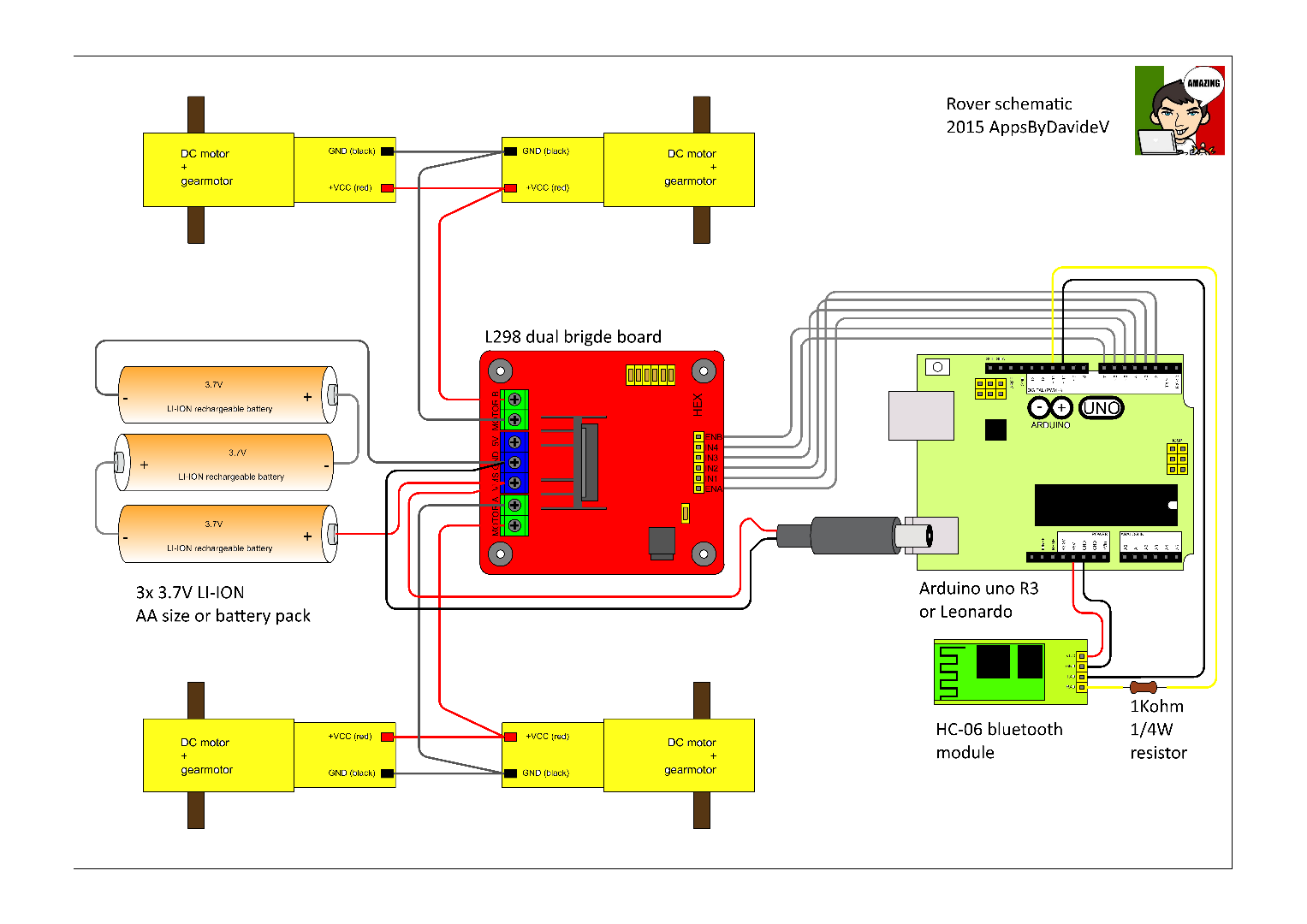
การต่อวงจรเป็นสิ่งสำคัญต่อความเสถียร โปรดตรวจสอบการกำหนด Pin ให้ถูกต้องตามแผนภาพ:
- Driver L298N: เชื่อมต่อกับ Digital Pins ของ Arduino สำหรับการควบคุมทิศทาง (IN1, IN2, IN3, IN4) และ PWM Pins สำหรับการควบคุมความเร็ว (ENA, ENB)
- โมดูล Bluetooth: เชื่อมต่อ TX Pin ของโมดูลเข้ากับ RX ของ Arduino และ RX Pin ของโมดูลเข้ากับ TX ของ Arduino ข้อควรระวัง: โมดูล HC-05/06 ส่วนใหญ่ทำงานที่ระดับ Signal 3.3V ดังนั้นควรต่อ Resistor 1k Ohm อนุกรมเข้ากับ RX Pin ของโมดูลเพื่อป้องกันความเสียหายจาก Signal 5V ของ Arduino
- แหล่งจ่ายไฟ: แหล่งจ่ายไฟจากแบตเตอรี่จะถูกแบ่งออกเป็นสองส่วน: ต่อตรงไปยัง L298N เพื่อขับเคลื่อนมอเตอร์ และผ่าน DC Jack เข้าสู่บอร์ด Arduino เพื่อผ่านวงจร Regulator บนบอร์ด
Step 3: การประกอบ Rover
ปฏิบัติตามขั้นตอนการประกอบตามลำดับ:
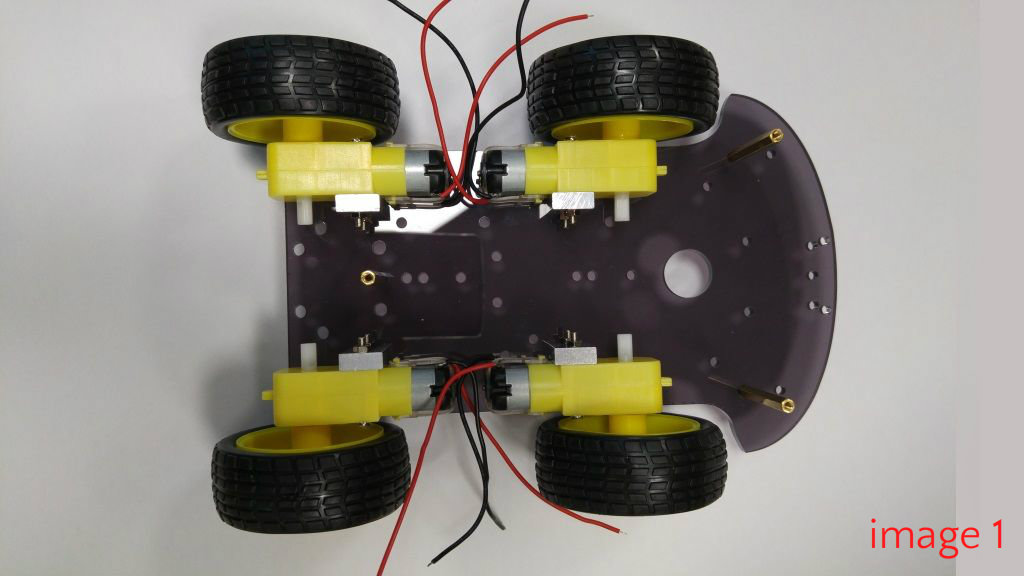
- ติดตั้งมอเตอร์: ยึด DC Gear Motors ทั้ง 4 ตัวเข้ากับแผ่น Chassis ด้านล่าง และติดตั้งล้อให้แน่น (รูปที่ 1)
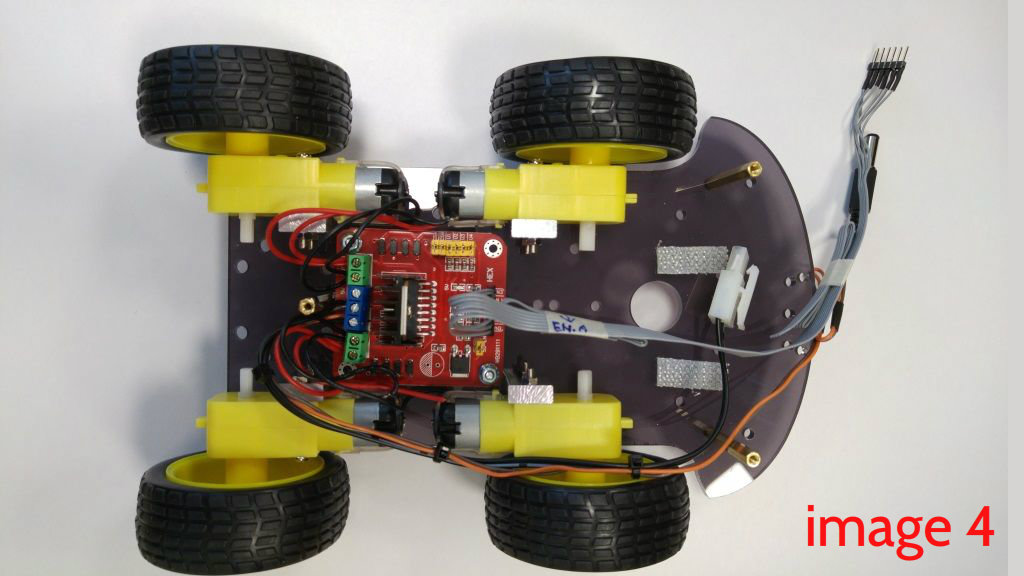
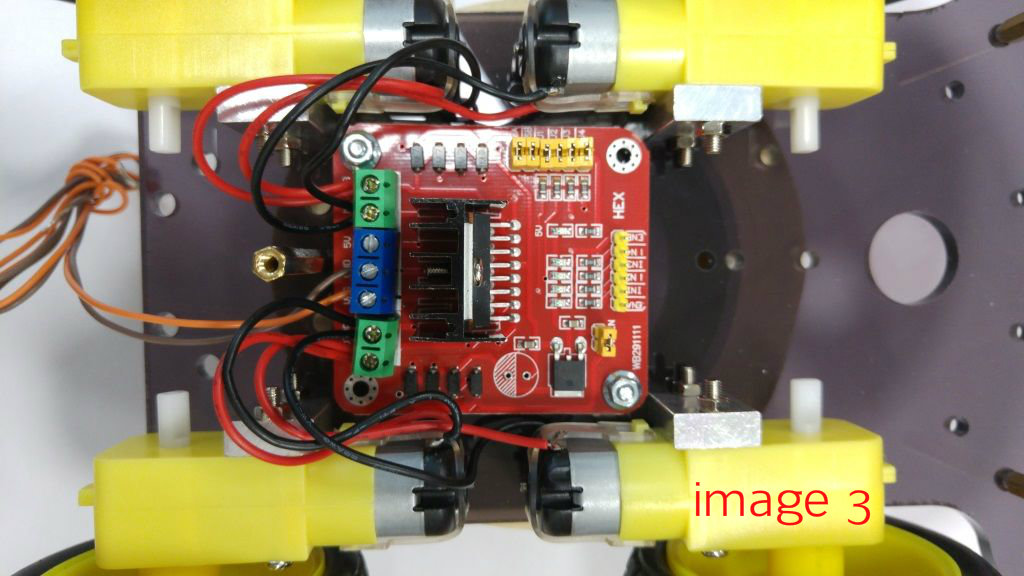
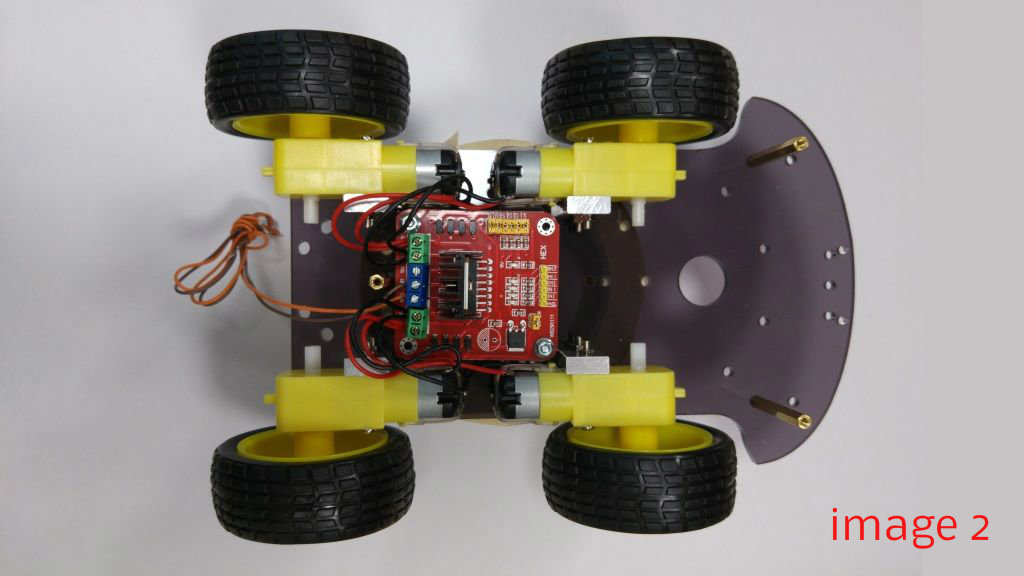
- ระบบขับเคลื่อน: ติดตั้งบอร์ด L298N และเดินสายมอเตอร์เข้ากับบอร์ด มอเตอร์ด้านซ้ายและขวาจะถูกต่อขนานกันเป็นสองชุดแยกกัน (รูปที่ 2-3)
- การจัดสายไฟ: ใช้ Flat Cable เพื่อความเรียบร้อย เชื่อมต่อ Control Pins จาก L298N ไปยัง Arduino และเชื่อมต่อ DC Jack เพื่อจ่ายไฟให้บอร์ด โดยระมัดระวังเรื่องขั้วบวกและลบ (รูปที่ 4)
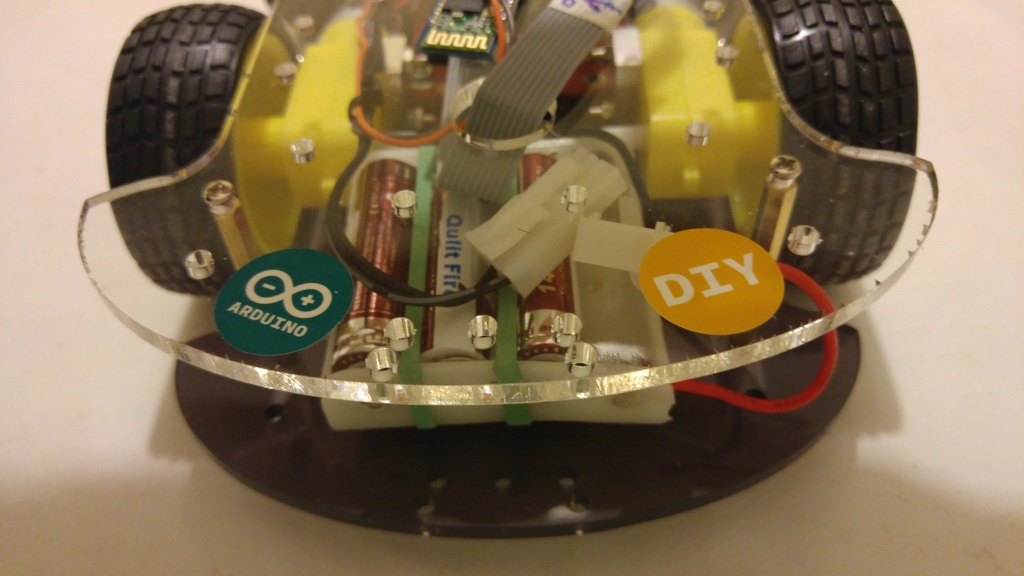
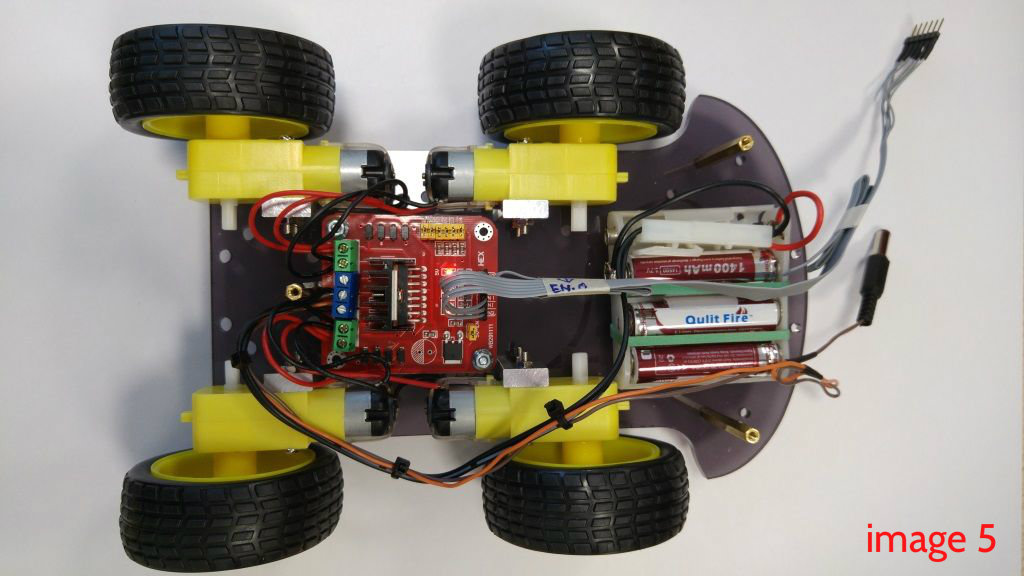
- แหล่งพลังงาน: วางกล่องใส่แบตเตอรี่หรือแพ็คแบตเตอรี่ไว้ที่ด้านหน้าของหุ่นยนต์เพื่อการกระจายน้ำหนัก ยึดด้วยเทปสองหน้าชนิดแข็งแรง (รูปที่ 5)
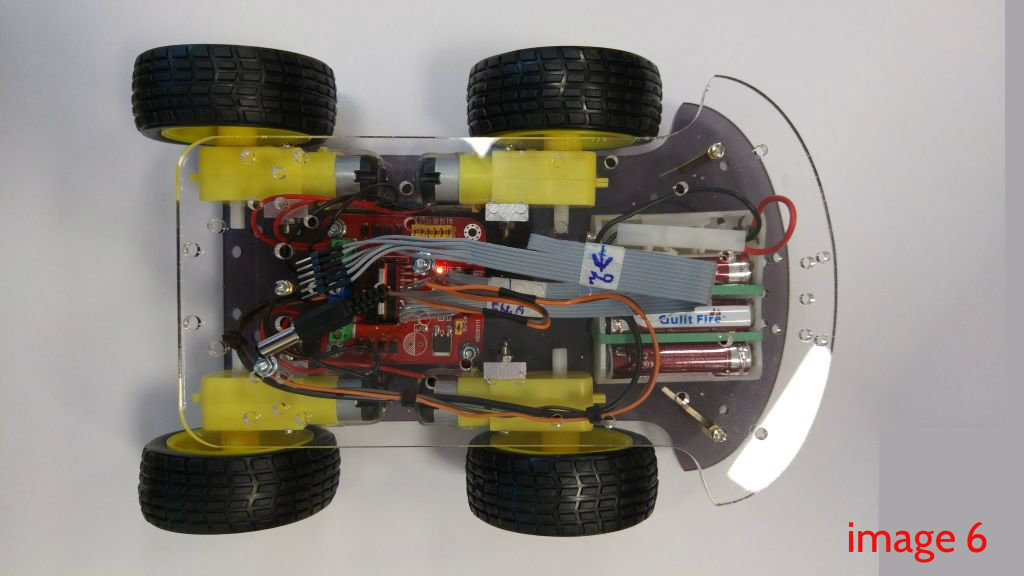
- ปิด Chassis ด้านบน: ประกอบแผ่น Chassis ด้านบน โดยร้อยสายไฟและ DC Jacks ผ่านช่องเปิดอย่างเรียบร้อย (รูปที่ 6)
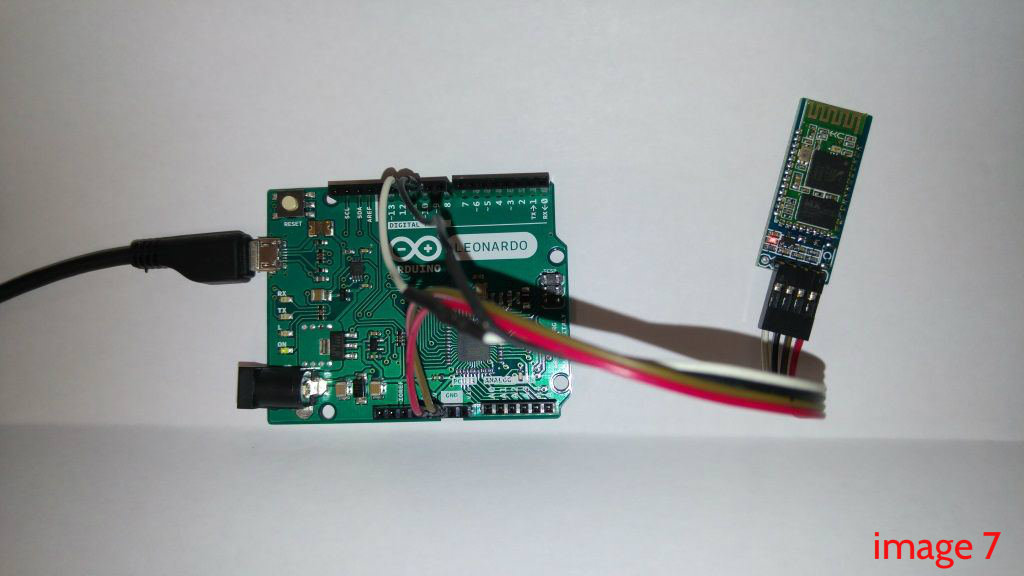
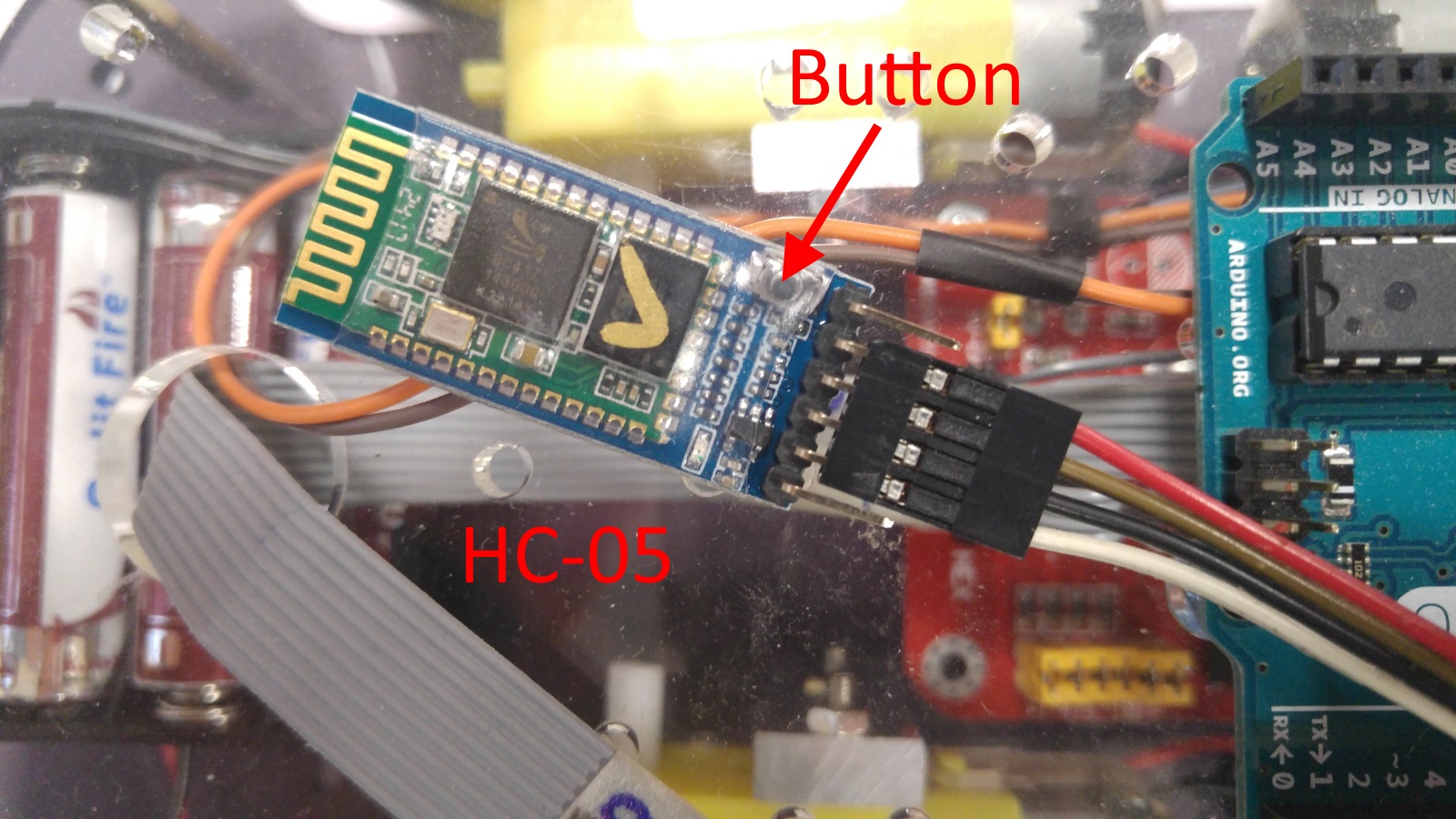
- โมดูล Bluetooth: เชื่อมต่อสาย Signal ด้วย Resistor 1k Ohm เข้ากับ RXD Pin เพื่อป้องกันความร้อนและ Overvoltage หุ้มด้วย Heat Shrink Tubing เพื่อความเรียบร้อย (รูปที่ 7)
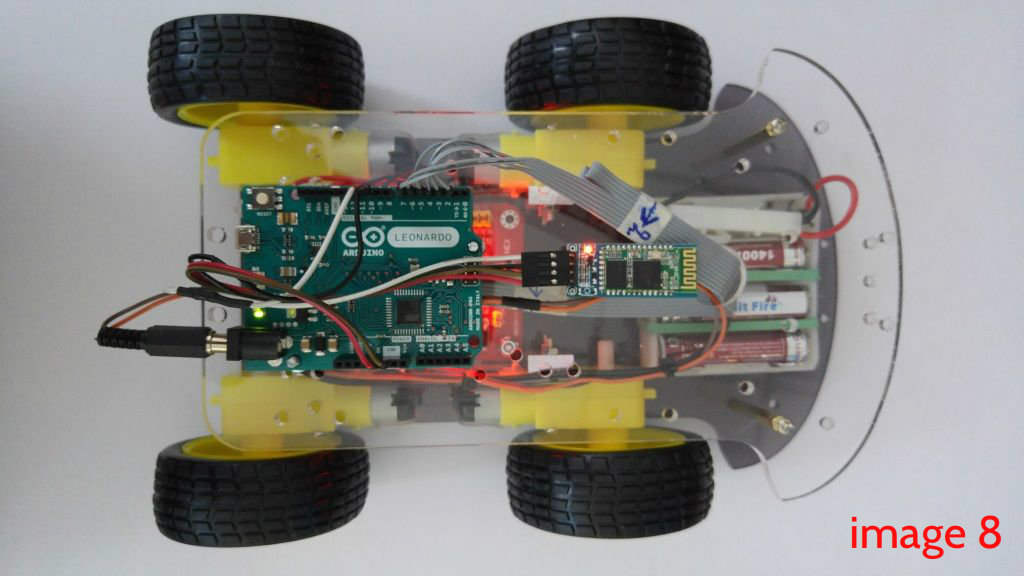
- ขั้นตอนสุดท้าย: ติดตั้ง Arduino และโมดูล Bluetooth บนแผ่น Chassis ด้านบน เชื่อมต่อ Power Jacks และ Signal Wires ทั้งหมดตามแผนภาพ Schematic (รูปที่ 8)
Step 4: Arduino Sketch และ Logic
ก่อนที่หุ่นยนต์จะทำงานได้ เราจำเป็นต้องตั้งโปรแกรม 'สมอง' ของมันให้เข้าใจการสื่อสารแบบ Bluetooth:
Code Logic:
โปรแกรมจะคอยรับฟังข้อมูลที่ส่งมาจากแอปพลิเคชันผ่าน Serial Port อย่างต่อเนื่อง เมื่อได้รับตัวอักษร (Command) เช่น 'F' (เดินหน้า), 'B' (ถอยหลัง), 'L' (เลี้ยวซ้าย), 'R' (เลี้ยวขวา) หรือค่าความเร็วที่เป็นตัวเลข Arduino จะประมวลผลค่าเหล่านี้ผ่านฟังก์ชันควบคุมความเร็วมอเตอร์โดยใช้คำสั่ง analogWrite() เพื่อสร้างสัญญาณ PWM ส่งไปยัง Enable Pins ของ L298N
ขั้นตอนการตั้งค่าโมดูล:
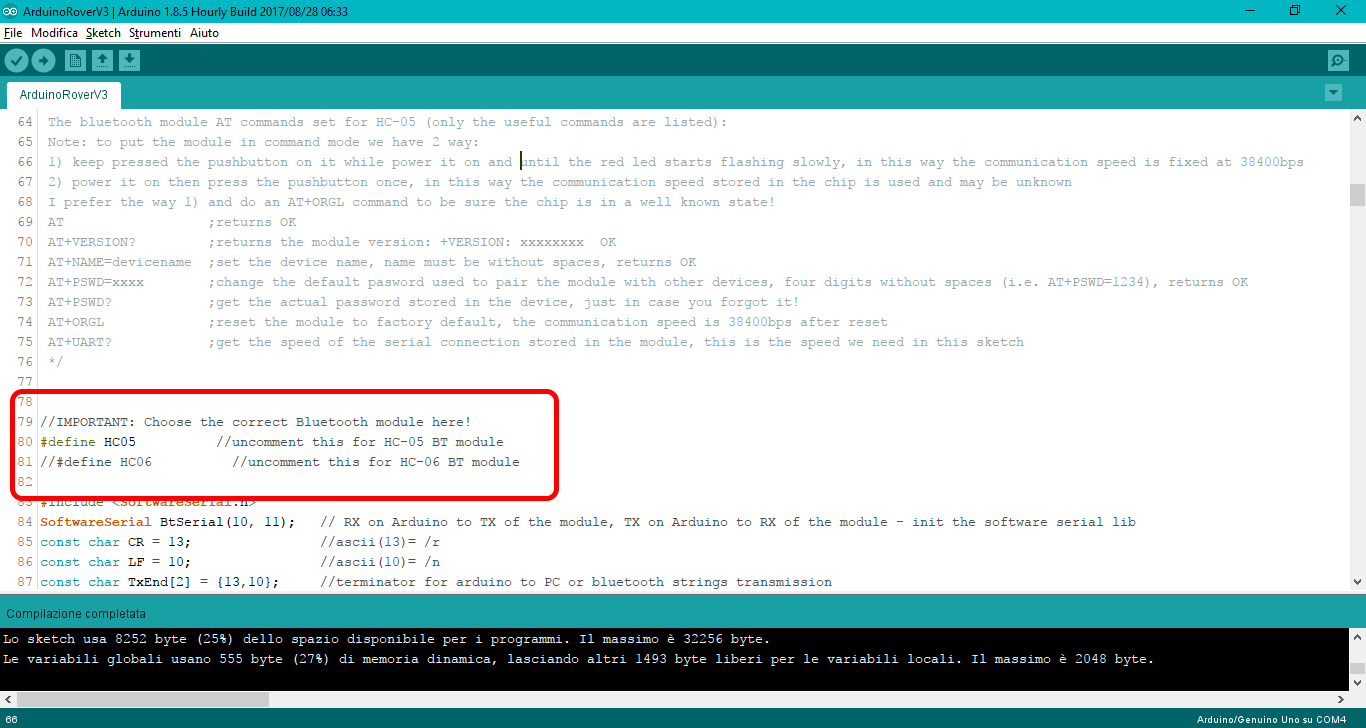
- เชื่อมต่อ Arduino เข้ากับคอมพิวเตอร์ของคุณ เปิด Sketch และเลือก
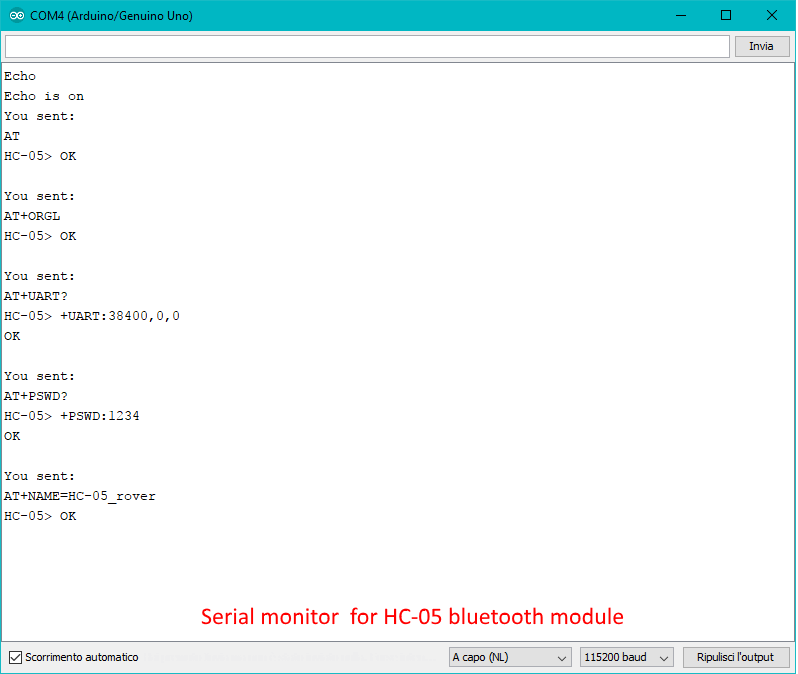
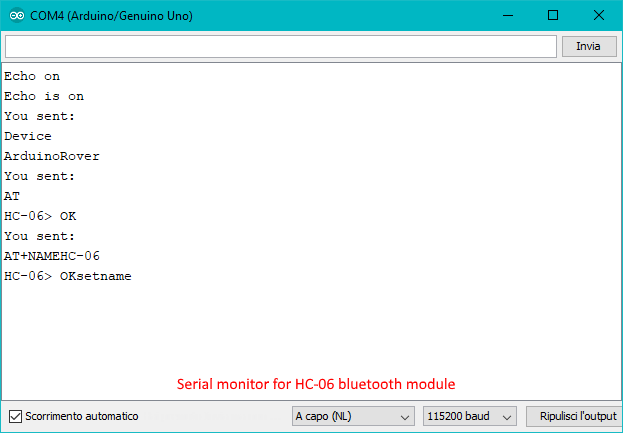
#defineที่ตรงกับโมดูลของคุณ (HC-05 หรือ HC-06) - เปิด Serial Monitor ตั้งค่าความเร็วเป็น 115200 baud และเลือก "Both NL & CR"
- สำหรับ HC-06: ส่ง `AT