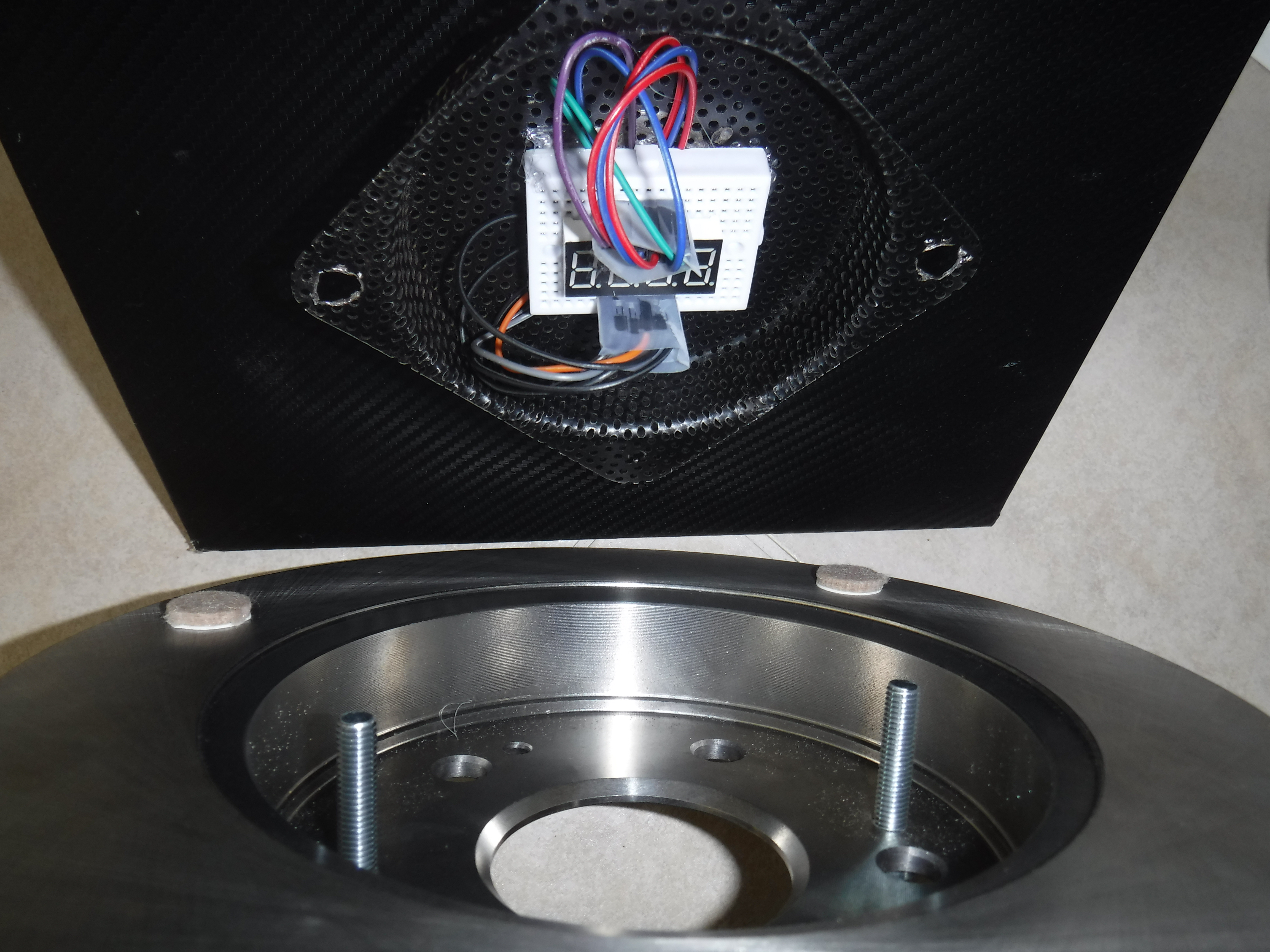
โปรเจกต์นี้เป็นหนึ่งในโปรเจกต์ที่ผมรอคอยมานานมาก โปรเจกต์นี้ยังสามารถใช้เป็นนาฬิกาธรรมดาได้โดยไม่ต้องมี rotor ตัวนาฬิกาถูกบรรจุอยู่ในจานโลหะธรรมดาที่ผมไม่เคยใช้ สายไฟถูกร้อยผ่านรูไปยังด้านหลัง ซึ่งเป็นที่ที่ Arduino และ RTC ถูกติดตั้งไว้อย่างแน่นหนา

ฐานทำจากไม้หนา 1/2 นิ้ว (ตรวจสอบให้แน่ใจว่าสามารถรองรับน้ำหนักของ rotor ของคุณได้) จากนั้นหุ้มด้วยไวนิลลาย carbon fiber โดยเก็บขอบให้เรียบร้อย ถัดมา เราใช้ขาไม้ขนาด 1x1 นิ้ว 2 ชิ้น ตัดให้เป็นมุม 50 หรือ 45 องศา จากนั้นติดกาวเข้ากับด้านหลังเพื่อเป็นตัวรองรับ (ดูภาพสุดท้าย) จาน/แผ่นโลหะของคุณจะถูกยึดด้วยสกรูที่ทนทานมาก (ชนิดใดก็ได้ ยกเว้นสกรูเครื่องจักร) จุดนี้เป็นจุดที่ซับซ้อน เนื่องจากคุณต้องต่อสายไฟของนาฬิกาไปด้านหน้า โดยให้สายไฟลอดผ่านด้านหลังไปยัง Arduino ที่ติดตั้งไว้ด้วยเทปกาวสองหน้า เมื่อต่อสายไฟเสร็จแล้ว คุณจะต้องทำความสะอาดคราบกาวและเศษวัสดุอื่นๆ ออกจากด้านหน้าและด้านหลัง ตอนนี้ทำเครื่องหมายตำแหน่งรูสำหรับติดตั้งสกรูของ rotor จริงๆ จากนั้นเจาะรูผ่านแผ่นโลหะ โดยต้องแน่ใจว่าคุณไม่ได้เจาะทะลุไม้ด้านล่าง หากคุณตัดสินใจซื้อ rotor แบบเดียวกับที่ผมใช้ จะมีรูสกรูที่เจาะเตรียมไว้แล้ว 2 รู พร้อมสำหรับสลักเกลียวของเราที่จะลอดผ่าน และทะลุผ่านรูยึดแผ่นโลหะที่เจาะไว้ก่อนหน้านี้ ขันสกรูให้แน่น โดยให้สกรูของคุณลอดผ่านรูใน rotor แล้วจึงลอดผ่านรูในแผ่นโลหะ


รายละเอียดทางเทคนิคเพิ่มเติม
ประติมากรรมจลน์ยานยนต์ (Automotive Kinetic Sculpture)
โปรเจกต์นี้เป็นการนำ brake rotor ของรถยนต์กลับมาใช้ใหม่ให้กลายเป็นนาฬิกาอุตสาหกรรมที่มีแรงบิดสูงและมีเอกลักษณ์
- High-Torque Stepper Drive: เนื่องจาก brake rotor โลหะมีน้ำหนักมาก การใช้กลไกนาฬิกาแบบมาตรฐานจึงไม่เพียงพอ Arduino ใช้ NEMA 17 stepper motor และ A4988 driver เพื่อขับเคลื่อน "เข็ม" ของ rotor ด้วยความแม่นยำสูง
- Chronometric Microstepping: เฟิร์มแวร์ใช้ 1/16 microstepping เพื่อให้มั่นใจว่าเข็มวินาทีจะเคลื่อนที่อย่างนุ่มนวลและเงียบกริบ แทนที่จะเป็นเสียง "คลิก" ที่ได้ยินจากกลไกควอตซ์ทั่วไป
การออกแบบ
- RTC Synchronization: ใช้ DS3231 I2C RTC เพื่อให้แน่ใจว่านาฬิกาทำงานได้อย่างแม่นยำแม้ในขณะที่ไฟดับ โดย Arduino จะปรับตำแหน่ง rotor กลับสู่ตำแหน่งเริ่มต้นโดยอัตโนมัติเมื่อเปิดเครื่อง