นี่คือโปรเจคสร้าง Delta Robot สุดแรง ควบคุมด้วย Arduino Mega ไม่ใช่หุ่นยนต์ธรรมดาที่เดินไปเดินมา แต่เป็นระบบอัตโนมัติที่ผสานกลไก ไฟฟ้า และคอมพิวเตอร์วิทัศน์เข้าด้วยกันอย่างลงตัว
ภาพรวมระบบ
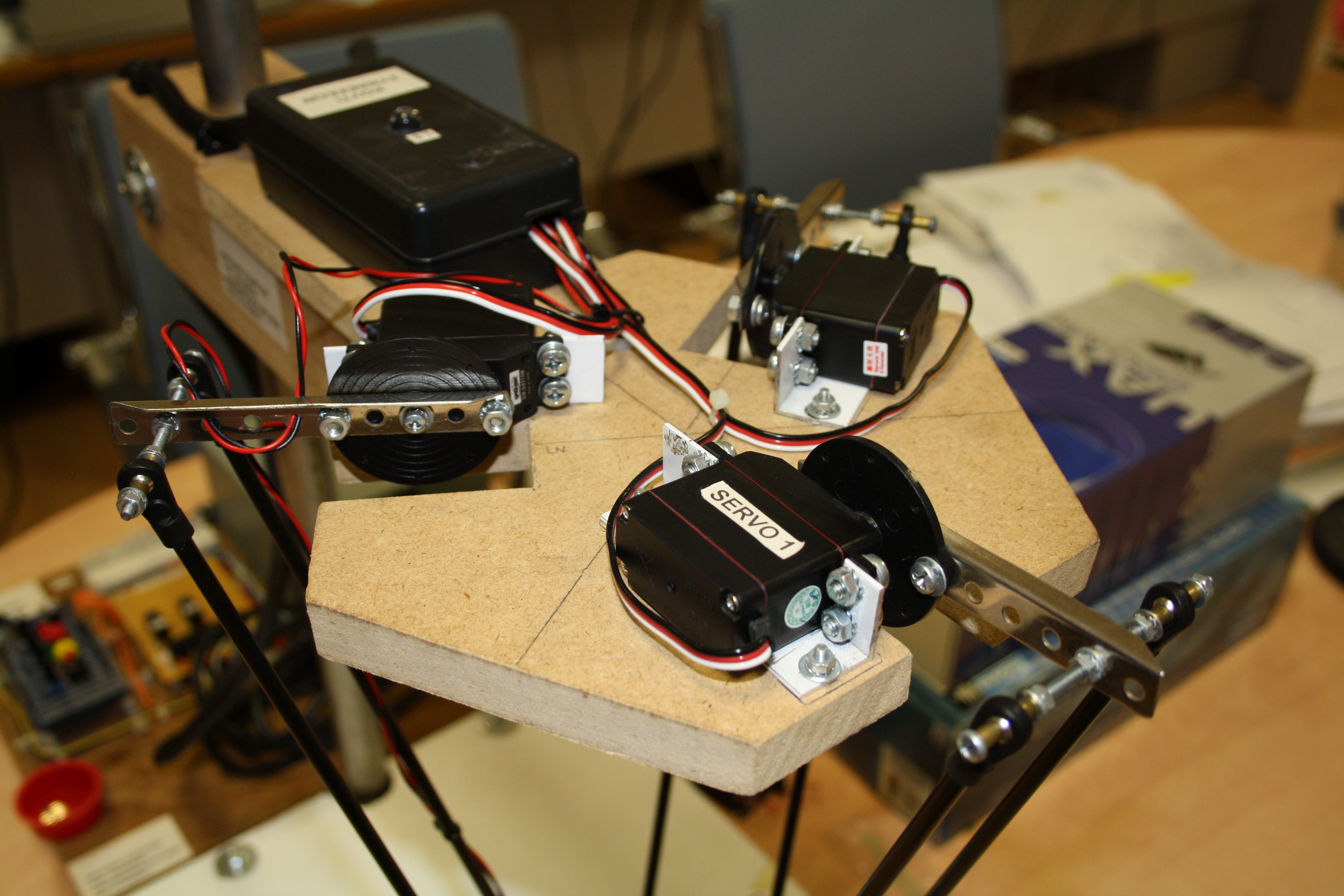
Delta Robot ตัวนี้ถูกออกแบบให้เคลื่อนที่เร็วและแม่นยำ ตามคุณสมบัติของ Parallel Manipulator โดยติดตั้ง Electromagnet ที่ปลายแขน ทำหน้าที่เป็น end-effector สำหรับจับและเคลื่อนย้ายวัตถุที่มีคุณสมบัติเฟอร์โรแมกเนติกหรือวัสดุที่แม่เหล็กดูดได้

ระบบควบคุม
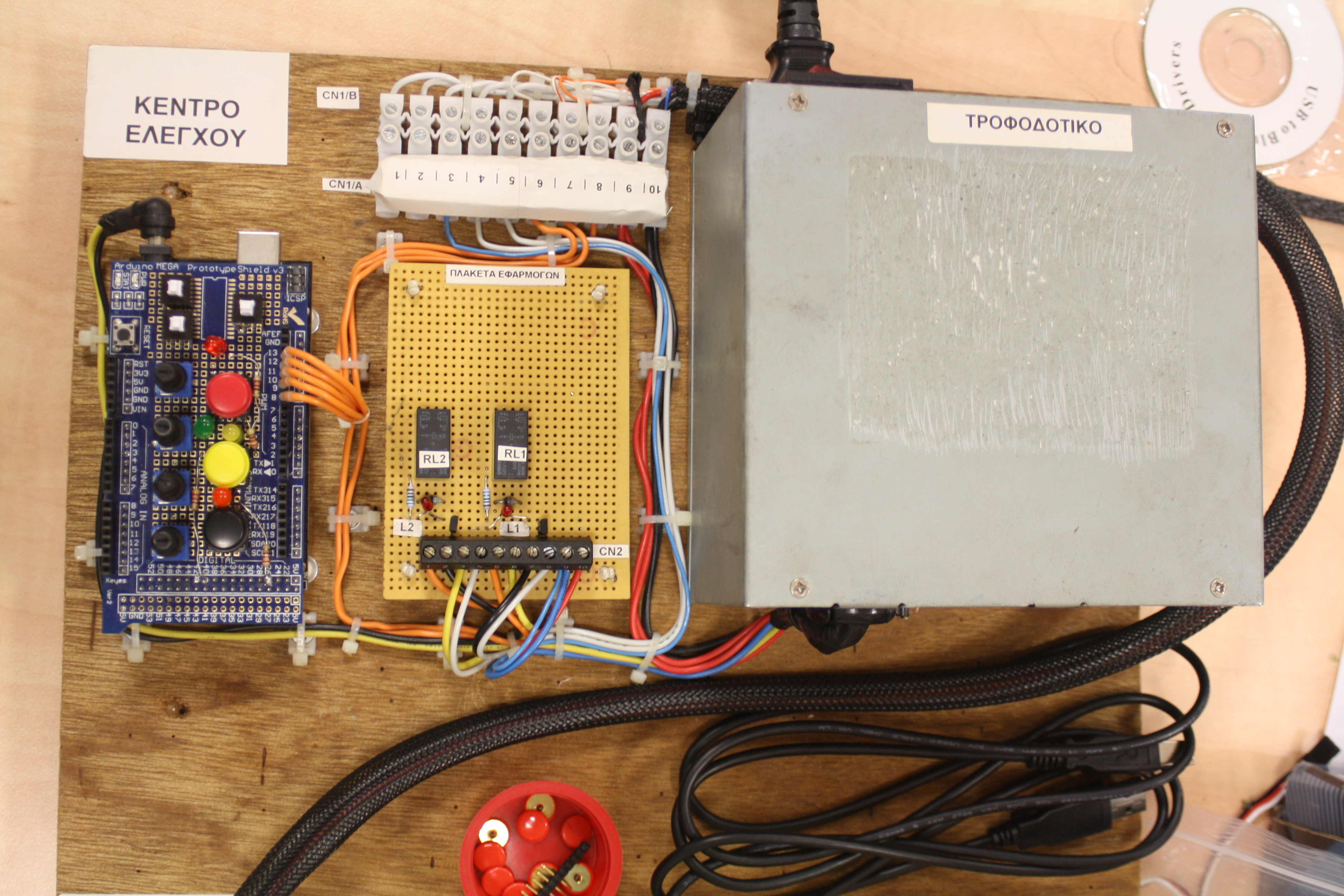
ระบบควบคุมออกแบบมาให้ยืดหยุ่นสูง รองรับการทำงานทั้งแบบ Manual และ Remote Control:
- แผงควบคุมแบบ Manual: แผงควบคุมประกอบด้วยปุ่มกด สวิตช์ และโพเทนชิออมิเตอร์ ผู้ใช้สามารถหมุนปรับเพื่อตั้งค่าพิกัดของหัวหุ่นยนต์ไปยังตำแหน่งที่ต้องการ และสลับเปิด-ปิด Electromagnet ได้ทันทีจากแผงด้านหน้า
- ควบคุมจากระยะไกล (Wireless via Bluetooth): หุ่นยนต์รองรับการรับคำสั่งผ่านพอร์ต UART Serial 1 (PIN 18 และ 19) ซึ่งสามารถเชื่อมต่อกับโมดูล Bluetooth เช่น HC-05 หรือ HC-06 เพื่อส่งพิกัดจากมือถือหรือคอมพิวเตอร์แบบไร้สายได้
โปรโตคอลการสื่อสาร
เพื่อให้การส่งข้อมูลระหว่างอุปกรณ์ภายนอกกับ Arduino Mega เป็นไปอย่างแม่นยำ เราใช้รูปแบบข้อความเฉพาะดังนี้:
รูปแบบคำสั่ง: @xxxx, yyyy, zzzz, m$
- @ และ $: เป็นตัวกำหนดจุดเริ่มต้นและสิ้นสุดของข้อความ เพื่อป้องกันข้อผิดพลาดจากสัญญาณรบกวนหรือข้อมูลสูญหาย
- xxxx, yyyy, zzzz: คือพิกัด X, Y และ Z ในรูปแบบ ASCII
- m: คือสถานะของ Electromagnet ('0' = ปิด, '1' = เปิด)
ตรรกะของโค้ด:
ในเฟิร์มแวร์ของ Arduino Mega เราใช้ฟังก์ชัน Serial1.parseInt() เพื่อแยกตัวเลขจากรหัส ASCII ที่ได้รับ หลังจากระบบประมวลผลและเคลื่อนที่ไปยังจุดหมายแล้ว ตัวอักษร @ จะถูกส่งกลับไปยังอุปกรณ์ต้นทางเป็นสัญญาณยืนยัน (Acknowledgment) แปลว่า "พร้อมรับคำสั่งถัดไปแล้วจ้า"
นอกจากนี้ หุ่นยนต์ยังส่งพิกัดปัจจุบันและสถานะของตัวเองออกไปยังอุปกรณ์ภายนอกผ่านพอร์ต UART 0 (PIN 0 และ 1) ซึ่งเชื่อมต่อกับพอร์ต USB ด้วย ดังนั้นผู้ใช้จึงสามารถเห็นผลลัพธ์บน Serial Terminal ของ Arduino IDE หรือบนอุปกรณ์อื่นๆ ที่มีพอร์ตอนุกรมได้
ระบบตรวจสอบและแสดงผล (Monitoring & Feedback System)
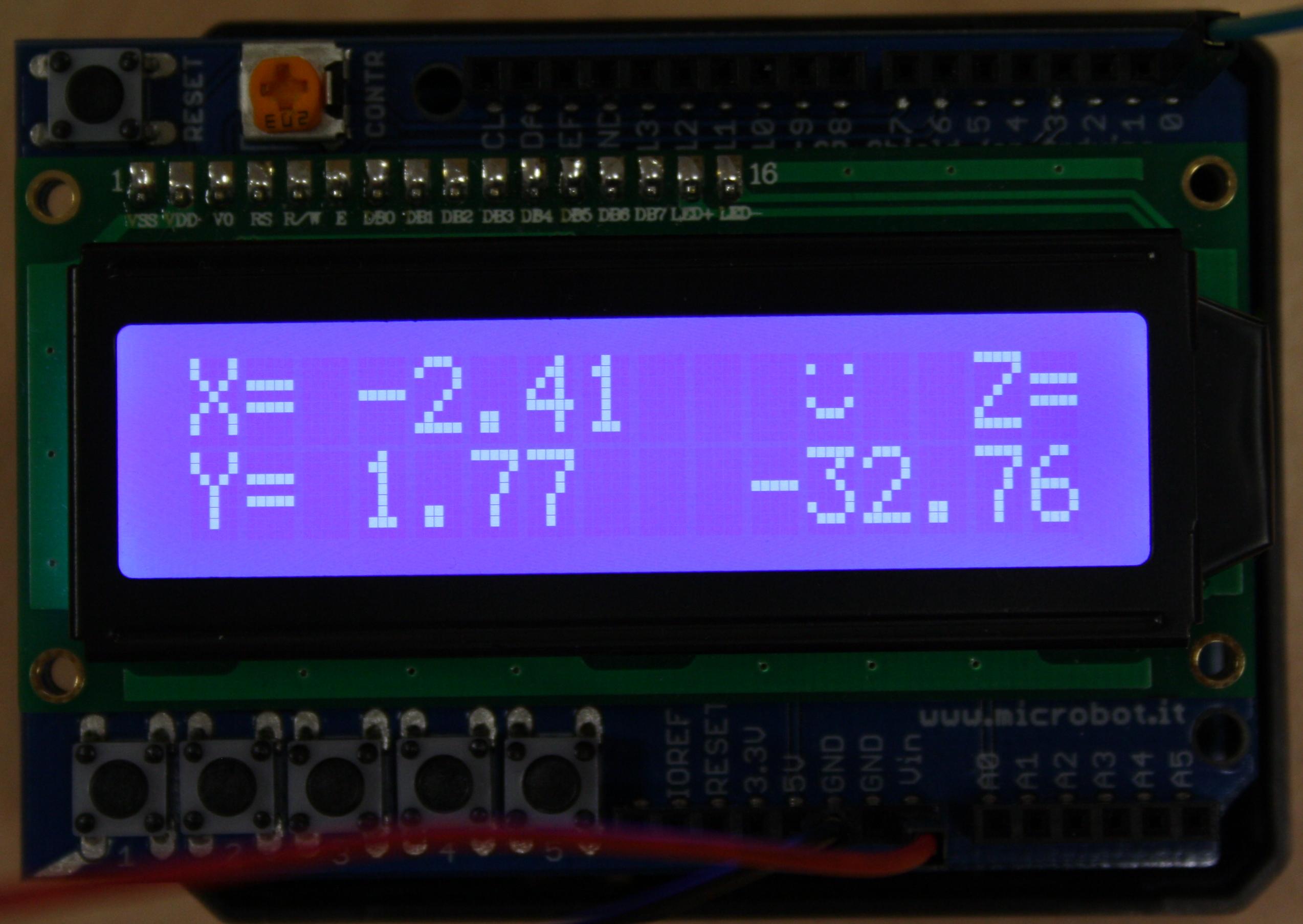
เพื่อให้เห็นผลลัพธ์แบบเรียลไทม์ เราจัดหนักด้วย Arduino UNO พร้อม LCD screen shield มาเป็นตัวแสดงผลแยก (Human-Machine Interface หรือ HMI) ตัวนี้จะรับข้อมูลจากพอร์ต UART 0 ของบอร์ด Mega แล้วแสดงพิกัดของหัวหุ่นยนต์ Delta ให้ดูกันชัดๆ
ตรรกะการตรวจสอบ (Validation Logic):
- ถ้าพิกัดที่ส่งมาอยู่ในพื้นที่ทำงาน (Workspace) ของแขนหุ่นยนต์ได้ LCD จะแสดงพิกัดปัจจุบันพร้อมกับสัญลักษณ์ "หน้ายิ้ม" (Happy Face) 🥳
- ถ้าพิกัดที่ส่งมาอยู่นอกขอบเขตการทำงาน (ตำแหน่งไม่ถูกต้อง) หุ่นยนต์จะไม่ขยับเพื่อป้องกันความเสียหายทางกล และหน้าจอจะแสดงสัญลักษณ์ "หน้าบึ้ง" (Sad Face) 😤 เพื่อเตือนผู้ใช้
ควบคุมผ่านแอปพลิเคชัน Android
เพื่อความสะดวกสบายแบบจัดเต็ม เราพัฒนาแอป Android ขึ้นมา สามารถแปลงการลากนิ้ว (Gesture) บนหน้าจอแท็บเล็ตให้เป็นพิกัด XYZ แล้วส่งตรงไปให้หุ่นยนต์ผ่าน Bluetooth เลย
ดาวน์โหลดแอป: (ลิงก์สำหรับดาวน์โหลดแอปพลิเคชัน)

แอปพลิเคชันขั้นสูง: เกม X-O (Tic Tac Toe)
เพื่อโชว์ศักยภาพตัวจริงของหุ่นยนต์ตัวนี้ เราทำการสาธิตโดยให้หุ่นยนต์เล่นเกม X-O กับมนุษย์ โดยใช้ Raspberry Pi 2 B+ เป็นสมองส่วนหน้า:
- ประมวลผลภาพ (Image Processing): ติดตั้ง Pi Camera ไว้ด้านบนเพื่อจับภาพกระดาน และใช้ไลบรารี OpenCV (C++) ในการวิเคราะห์ตำแหน่งของตัวหมาก
- ตรรกะเกม (Game Logic): เมื่อ Raspberry Pi ตัดสินใจเดินหมากแล้ว มันจะคำนวณตำแหน่งและส่งคำสั่งผ่าน UART ไปยัง Arduino Mega เพื่อสั่งให้หุ่นยนต์หยิบและวางหมาก
- ระบบป้องกันโกง (Anti-Cheating): ระบบนี้ฉลาดพอที่จะตรวจจับได้ถ้ามนุษย์พยายามโกง ถ้าตรวจพบการเคลื่อนหมากที่ไม่ถูกต้อง หุ่นยนต์จะเคลื่อนหมากกลับไปยังตำแหน่งที่ถูกต้องล่าสุดและขอให้เดินใหม่
วิดีโอสาธิต (Delta Robot in Action):
โปรเจกต์นี้พิสูจน์แล้วว่า Arduino Mega นั้นทรงพลังพอที่จะจัดการงานควบคุมตำแหน่งที่ซับซ้อนแบบหุ่นยนต์ Delta ได้ เมื่อจับคู่กับโปรโตคอลการสื่อสารที่ดีและการประมวลผลจากภายนอกที่แรงๆ ระบบนี้สามารถนำไปประยุกต์ใช้ได้กว้างขวาง ไม่ว่าจะเป็นในโรงงานอุตสาหกรรมขนาดเล็ก สำหรับคัดแยกสินค้า หรือเป็นหุ่นยนต์บริการก็ยังได้ สู้งานนะน้อง!