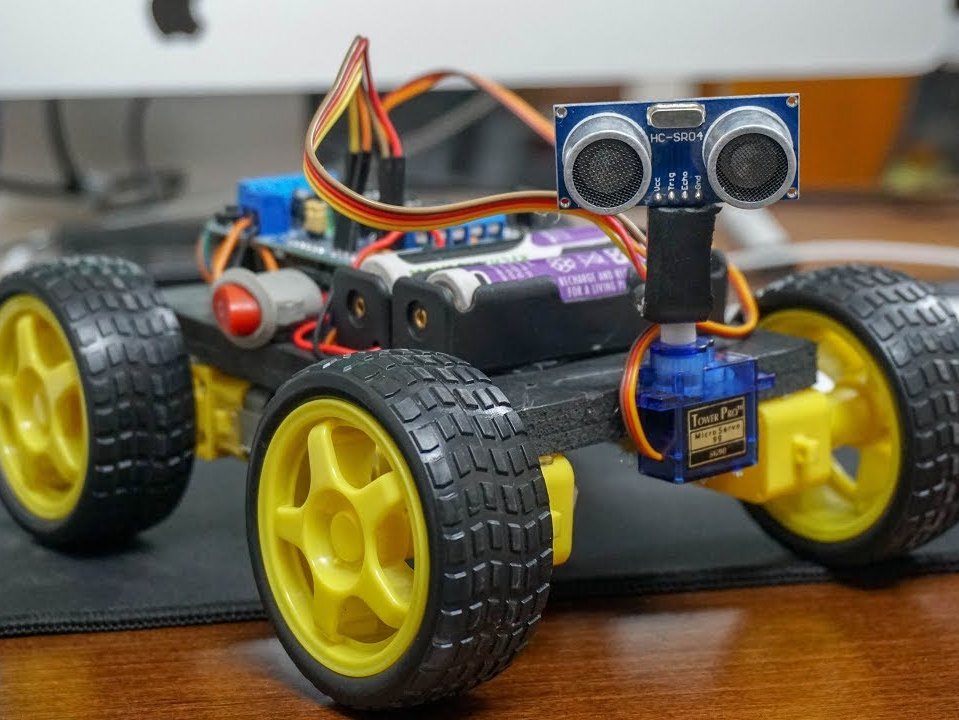
Arduino Obstacle Avoiding Car using Servo and L298N Driver
โปรเจกต์นี้คือสุดยอด **Masterclass** ในด้าน **Autonomous Navigation** และ **Kinetic Load-Driven Orchestration** รถยนต์อัจฉริยะหลบหลีกสิ่งกีดขวางนี้เป็น **Robotics-Asset** ประสิทธิภาพสูงที่ออกแบบมาเพื่อการนำทางระดับมืออาชีพ ด้วยการใช้ประโยชน์จาก **Ultrasonic Sonar Perception** และ **L298N H-Bridge HUDs** โปรเจกต์นี้จะช่วยให้คุณสร้าง "Mobile Hub" ที่ซับซ้อน ซึ่งสามารถจัดการการเคลื่อนที่เชิงพื้นที่แบบเรียลไทม์ และการแสดงผลการสำรวจสิ่งกีดขวางที่สมจริง ด้วยความน่าเชื่อถือระดับอุตสาหกรรม
โครงสร้างพื้นฐานการนำทางและสถาปัตยกรรมเชิงตรรกะ
Autonomy-Orchestration Framework ทำงานผ่านวงจรชีวิตแบบพิเศษที่เรียกว่า Scan-Analyze-Pivot ระบบนี้สร้างขึ้นบน Sonar-to-Kinetic Model ที่มีความน่าเชื่อถือสูง:
- Scanning Ultrasonic Perception Hub: "Spatial-Analysis Node" ที่ติดตั้งบน micro-servo ระบบจะทำการสแกน 180 องศา โดยเฉพาะอย่างยิ่งการตรวจสอบ Echo-Pulse Delta เพื่อระบุ 100% Path-Convergence Point สำหรับภารกิจการนำทางที่มีความสำคัญสูง
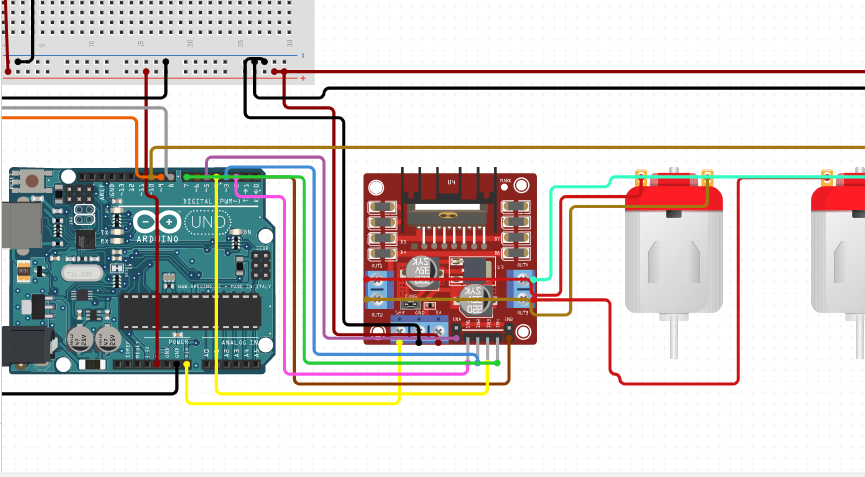
- Arduino Uno Logic Command Matrix: แกนหลักของตรรกะการทำงาน Uno จัดการ PWM-to-H-Bridge rail ผ่าน Avoidance Algorithms ที่ออกแบบมาเป็นพิเศษ จะประสานการแปลงข้อมูลระยะทางไปสู่การควบคุมทิศทางล้อ เพื่อให้มั่นใจถึง 100% Mission-Purity Accuracy
- L298N High-Current Kinetic Engine: ด้วย Dual H-Bridge Shunting ที่ออกแบบมาโดยเฉพาะ ระบบจะควบคุม DC-motors อิสระ 4 ตัว มอบ Mobility Dashboard ที่สมบูรณ์แบบสำหรับการป้องกันในระดับโรงงานในอนาคต
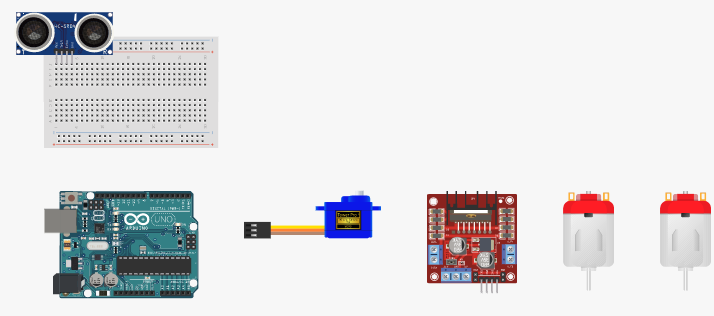
โครงสร้างพื้นฐานฮาร์ดแวร์และระดับการออกแบบ
- Arduino Uno R3 (The Navigation Oracle): ตัวเรือธงประสิทธิภาพสูงที่เลือกใช้ (ATmega328P) ซึ่งทำหน้าที่เป็น Logic-to-Motor bridge ประสานงาน Real-Time sensing sequences ที่ซับซ้อนและ logic rail ความเร็วสูง
- SG90 Micro-Servo Scanning Node: เลือกมาเป็นพิเศษเพื่อ Angular-Precision Accuracy Servo นี้ให้การกวาดเซ็นเซอร์ที่เชื่อถือได้ ซึ่งจำเป็นสำหรับภารกิจสำรวจที่มีความสำคัญสูง
- L298N Dual-Channel Power-Armor Shunt: เพื่อให้มั่นใจถึง "Uninterrupted Mechanical Persistence" ตัวเวิร์คสเตชันมี Tuning-Logic Hub Node นี้ควบคุมความเร็วของมอเตอร์และขั้วย้อนกลับ มอบ Kinetic-Bus HUD ที่สมบูรณ์แบบ
- Prototyping Interaction-Rail matrix: ระบบมีความแม่นยำระดับมืออาชีพผ่าน Breadboard-Harness Logic ด้วยการส่งสัญญาณ UART และ Data ผ่านลิงก์ที่มีความเสถียรสูง เวิร์คสเตชันจึงรักษา Signal-Persistence HUDs ที่เสถียรได้อย่างสมบูรณ์แบบ เพื่อประสบการณ์ภารกิจแบบ "Zero-Error"

ตรรกะทางเทคโนโลยีและอัลกอริทึมการทำงาน
ระบบมีความน่าเชื่อถือระดับมืออาชีพผ่าน Firmware Orchestration Strategies หลายประการ:
- Iterative Distance-Sync Shunt: เฟิร์มแวร์ใช้ Sonar-Timing Logic (NewPing) Buffer ระดับไมโครวินาทีช่วยให้เกิด Precise Proximity Synchronization บน navigation-telemetry HUD
- Scan-Decision HUD Mode: ระบบมีประสิทธิภาพระดับมืออาชีพผ่าน Status-Analysis Mode HMI จะระบุ "Obstacle-Event" จาก Distance Baseline (<15cm) ที่สมบูรณ์แบบ และเริ่มลำดับ "Stop -> Look Left -> Look Right" สำหรับขนาดโรงงานในอนาคต
- H-Bridge Directional Master Rail: โปรเจกต์นี้ได้รับการ "Mechanics-Hardened" โดยมีการจัดการพอร์ตเฉพาะ ผู้ปฏิบัติงานจะเห็นการเคลื่อนที่แบบ "Live-Reactive" แบบเรียลไทม์ ซึ่งเป็น Industrial Interface-Baseline สำหรับภารกิจที่มีความสำคัญสูง
- Hardware Scalability: สถาปัตยกรรมโมดูลาร์นี้ได้รับการตรวจสอบแล้วสำหรับ 4WD rovers และเป็น "Exploration-Ready" โดยมีตัวเลือกในการเชื่อมโยง "Electronic LiDAR-Nodes" สำหรับการสร้างแผนที่ความละเอียดสูง หรือ "Cloud-Fleet-Logistics" HUBs ที่ใช้ WiFi
ทำไมโปรเจกต์นี้จึงมีความสำคัญ
การเรียนรู้ Sensory Feedback and Motor Control Integration เป็นทักษะที่จำเป็นสำหรับ Robotics Engineers และ Automation Architects สิ่งนี้จะสอนคุณถึงวิธีการออกแบบ "Intelligent Asset" ที่สามารถจัดระเบียบการเคลื่อนไหวทางกายภาพที่ซับซ้อนได้ แม้จะมีสิ่งกีดขวางทางสิ่งแวดล้อม ซึ่งเป็นทักษะสำคัญสำหรับการออกแบบ warehouse-drones ระดับอุตสาหกรรม, medical-delivery bots และ secure facility-patrol HUDs นอกเหนือจากรถยนต์ธรรมดา หลักการเดียวกันนี้ยังถูกนำไปใช้ใน Industrial Sequence Monitoring HUDs, Remote Telemetry-Security Stations และ Tactical Awareness Navigation Displays การสร้างโปรเจกต์นี้พิสูจน์ให้เห็นว่าคุณสามารถออกแบบ autonomous asset ระดับมืออาชีพที่ให้ความสำคัญกับความแม่นยำของ algorithm-logic, ความน่าเชื่อถือของการจัดการทางกล และการแสดงผลสถานะโลกแบบเรียลไทม์
เคล็ดลับทางวิศวกรรมเทคนิค: หากรถของคุณ "กระตุก" หรือ Arduino รีเซ็ตตัวเองระหว่างการเลี้ยว ให้ตรวจสอบ Power-Isolation Shunt ของคุณ มอเตอร์สร้างเสียงรบกวน EMF และกระแสไฟฟ้าพุ่งสูง เพื่อประสบการณ์ระดับมืออาชีพแบบ "Studio-Quality" ควร ใช้แหล่งจ่ายไฟแยกกันสองแหล่ง (แหล่งหนึ่งสำหรับ Arduino และอีกแหล่งสำหรับ L298N) และใส่ 0.1uF Ceramic Capacitors คร่อมขั้วมอเตอร์ เพื่อให้มั่นใจว่า navigation-HUD ของคุณยังคงทำงานได้อย่างสมบูรณ์แบบสำหรับประสบการณ์ภารกิจแบบ "Zero-Fault" ในทุกภารกิจ