ระบบช่วยถอยหลัง: Parking Sensor ด้วย Arduino
Parking Sensor นำเทคโนโลยีที่พบในกันชนของรถหรู มาปรับขนาดให้เหมาะกับ Arduino เป็นโปรเจกต์ที่ยอดเยี่ยมสำหรับโรงรถของคุณ หรือเป็นฟังก์ชันหนึ่งสำหรับหุ่นยนต์รถยนต์อัตโนมัติ
หลักการทำงานของ Dynamic Mapping
ความยอดเยี่ยมของโปรเจกต์นี้อยู่ที่ฟังก์ชัน map()
- HC-SR04 วัดระยะทาง (เช่น 20 ซม. ถึง 200 ซม.)
- Arduino จะแมประยะทางนั้นไปเป็นเวลาหน่วง (เช่น 50 มิลลิวินาที ถึง 1000 มิลลิวินาที)
- Buzzer จะส่งเสียงบี๊บโดยใช้เวลาหน่วงที่แมปไว้
- ผลลัพธ์คือ: ที่ระยะ 200 ซม. จะเป็นเสียง
บี๊บ... บี๊บ...ที่ระยะ 20 ซม. จะเป็นเสียงบี๊บ-บี๊บ-บี๊บ-บี๊บเป็นเสียงเตือนต่อเนื่อง
ส่วนประกอบที่ต้องใช้
- Arduino Uno/Nano
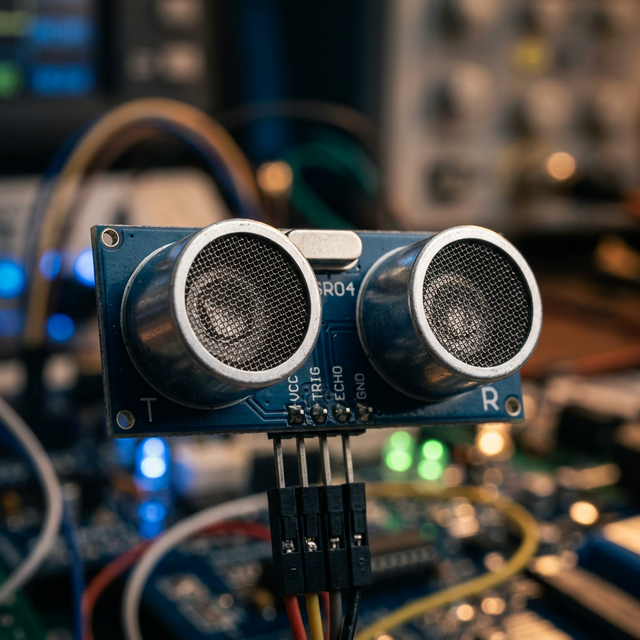
- HC-SR04 Ultrasonic Distance Sensor
- Piezo Buzzer (Active or Passive)
- LEDs (สีแดง, สีเหลือง, สีเขียว): สำหรับไฟเตือนแบบสัญญาณไฟจราจรบนผนังด้านหน้าคุณ
นี่คือระบบที่ทำงานได้อย่างสมบูรณ์ คุณสามารถใส่ Arduino และ Buzzer ไว้ใน junction box ติดตั้งไว้บนผนังด้านหลังโรงรถของคุณ และจะมีระบบอัตโนมัติที่จะนำทางคุณเข้าสู่ที่จอดรถแคบๆ ได้ทุกวัน