บทคัดย่อ
โปรเจกต์นี้คือการตรวจจับวัตถุด้วยมอเตอร์เซอร์โวและเซ็นเซอร์อัลตราโซนิก ใช้เรดาร์ที่เขียนด้วย Java ในการแสดงตำแหน่งวัตถุเสมือน พร้อมความกว้างและระยะห่างจากเซ็นเซอร์ ช่วยให้มนุษย์สามารถเฝ้าระวังพื้นที่กว้างจากจุดสังเกตการณ์เพียงจุดเดียว ช่วยลดการใช้แรงงานคนและเพิ่มประสิทธิภาพด้านความปลอดภัย เพราะเครื่องจักรนั้นแม่นยำและทำงานได้ต่อเนื่องกว่ามนุษย์
ระบบนี้ถูกออกแบบมาเพื่อช่วยงานเฝ้าระวังพื้นที่กว้างจากศูนย์ควบคุม ช่วยลดภาระงานคนและเพิ่มความแม่นยำ เนื่องจากระบบเครื่องจักรสามารถทำงานได้ตลอด 24 ชั่วโมงและมีอัตราความผิดพลาดต่ำกว่ามนุษย์
ข้อดี
- ต้นทุนต่ำสำหรับการเฝ้าระวังพื้นที่กว้าง
- แม่นยำและมีประสิทธิภาพกว่า
- ความแม่นยำสูง: วัดพิกัดระยะทางด้วยคลื่นอัลตราโซนิกได้แม่นยำ
- ระบบอัตโนมัติ: ลดการพึ่งพามนุษย์ ทำงานได้ตลอด 24 ชม.
ขั้นตอนการสร้าง
ขั้นตอนที่ 1: อุปกรณ์ที่ต้องใช้
ไปเปิดคลังอาวุธ (ตู้เก็บของ) แล้วหยิบอุปกรณ์เหล่านี้มาซะ....
สิ่งที่ต้องเตรียม:-
- Arduino UNO
- เซ็นเซอร์อัลตราโซนิก (HC-SR04)
- มอเตอร์เซอร์โว
- บอร์ดทดลอง (เบรดบอร์ด)
- สายจัมเปอร์อีกนิดหน่อย
ก่อนเริ่ม มาจัดเตรียมอุปกรณ์ช่างพื้นฐานกัน:
- Arduino UNO R3: บอร์ดไมโครคอนโทรลเลอร์หลักสำหรับควบคุมลอจิก
- เซ็นเซอร์อัลตราโซนิก (HC-SR04): เซ็นเซอร์วัดระยะด้วยคลื่นความถี่สูง (40kHz)
- มอเตอร์เซอร์โว (เช่น SG90 หรือ MG90S): มอเตอร์สำหรับควบคุมการหมุนในแนวระดับ 180 องศา
- เบรดบอร์ด & สายจัมเปอร์: สำหรับต่อวงจรทดสอบ
- อุปกรณ์ยึด: ปืนกาวร้อนหรือเทปกาวสองหน้าหนาๆ สำหรับยึดเซ็นเซอร์เข้ากับหัวเซอร์โว
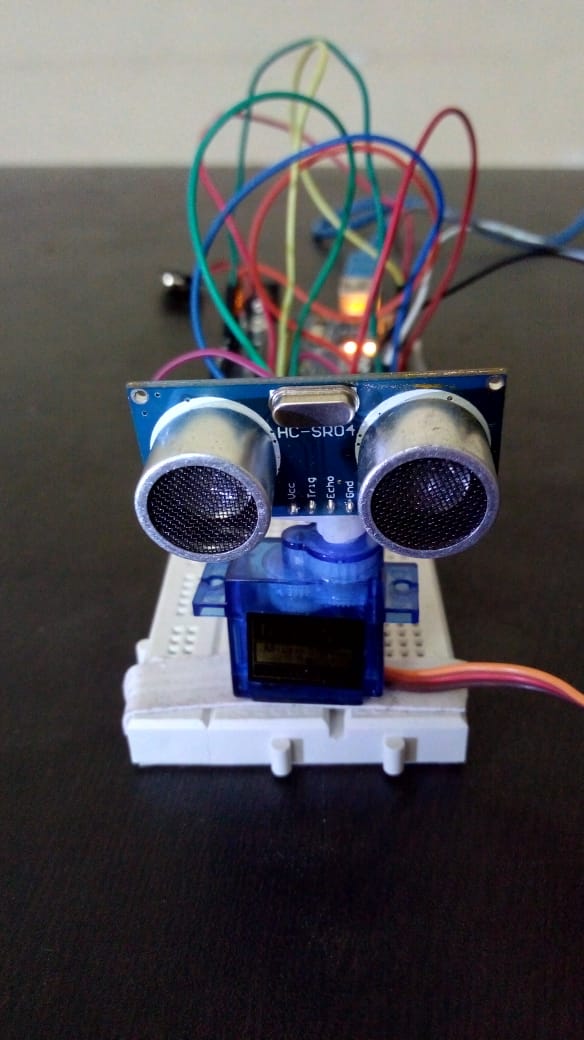
ขั้นตอนที่ 2: ต่อวงจรฮาร์ดแวร์
ดูจากไดอะแกรมแล้วต่ออุปกรณ์ทั้งหมดตามนี้เลย
- Triggerpin ต่อที่ขา 10
- Echopin ต่อที่ขา 11
- Servo pin ต่อที่ขา 12
การต่อแต่ละชิ้นส่วนเข้ากับ Arduino ต้องทำอย่างแม่นยำเพื่อให้การส่งสัญญาณ (Signal Processing) ถูกต้อง ไดอะแกรมการต่อมีดังนี้:
- เซ็นเซอร์อัลตราโซนิก (HC-SR04):
- VCC ต่อกับ 5V ของ Arduino
- GND ต่อกับ GND ของ Arduino
- ขา Trigger ต่อกับ Digital Pin 10 (มีหน้าที่ส่งพัลส์สัญญาณออกไป)
- ขา Echo ต่อกับ Digital Pin 11 (มีหน้าที่รับสัญญาณที่สะท้อนกลับมา)
- มอเตอร์เซอร์โว:
- ขาสัญญาณ (สายสีส้ม/เหลือง) ต่อกับ Digital Pin 12
- VCC (สายสีแดง) ต่อกับ 5V
- GND (สายสีน้ำตาล/ดำ) ต่อกับ GND
ทิปทางเทคนิค: หลังจากต่อวงจรเสร็จ ให้ใช้ปืนกาวร้อนยึดเซ็นเซอร์อัลตราโซนิกเข้ากับแกนหมุนของมอเตอร์เซอร์โวให้แน่น เพื่อป้องกันการสั่นสะเทือนที่อาจทำให้เกิดสัญญาณรบกวนหรือค่าที่วัดได้คลาดเคลื่อน
ห้ามลืมติดตั้งเซ็นเซอร์บนหัวมอเตอร์เซอร์โวนะ ใช้ปืนกาวร้อนหรือกาวอะไรก็ได้ที่ติดแน่นๆ
ขั้นตอนที่ 3: ลงมือเขียนโค้ด
อัพโหลดโค้ดที่เขียนใน Arduino IDE ลงบอร์ด Arduino ผ่านสาย USB จากนั้นก็คอมไพล์โค้ดที่เขียนด้วย Java ใน Eclipse (หรือ Java IDE อื่นๆ)
โปรเจกต์นี้ทำงานด้วยซอฟต์แวร์สองส่วนร่วมกัน:
ฝั่ง Arduino: คุมให้เซอร์โวหมุนจาก 15 ถึง 165 องศา (แล้วหมุนกลับ) ในแต่ละองศาที่เคลื่อนที่ Arduino จะสั่งให้เซ็นเซอร์ HC-SR04 ปล่อยคลื่นอัลตราโซนิกและคำนวณระยะทางด้วยสูตร:
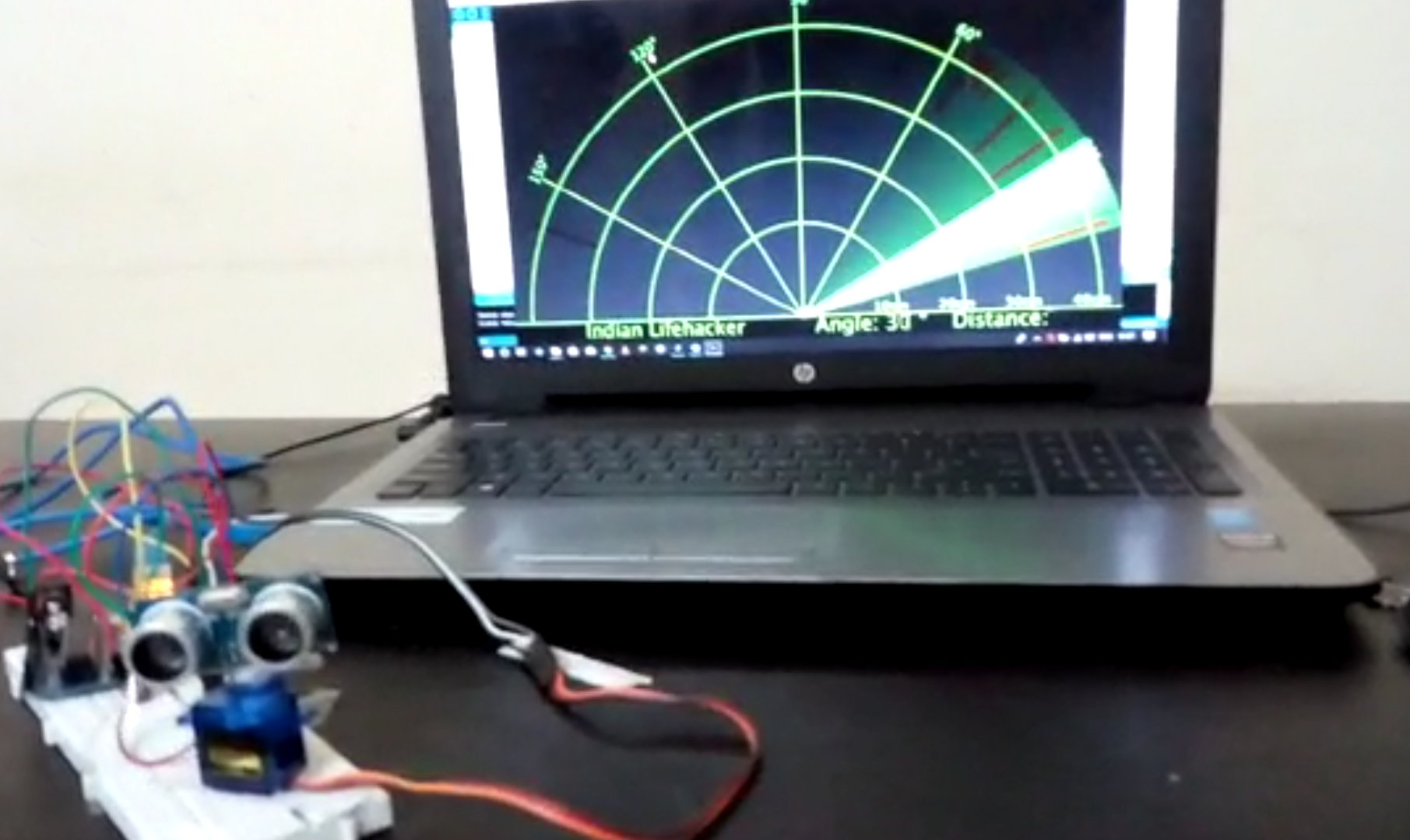
ระยะทาง = (เวลา * 0.034) / 2จากนั้นจะส่งข้อมูล "มุม" และ "ระยะทาง" ผ่านพอร์ตอนุกรม (USB) ในรูปแบบสตริง เพื่อให้คอมพิวเตอร์นำไปประมวลผลต่อฝั่ง Java/Processing: เมื่อได้รับข้อมูลจากพอร์ตอนุกรม โปรแกรมจะวาดเส้นเรดาร์และจุดสีแดงบนหน้าจอเพื่อแสดงตำแหน่งของวัตถุตามมุมและระยะทางที่ได้รับแบบเรียลไทม์
วิธีการติดตั้ง:
- อัพโหลดโค้ด Arduino IDE ลงบอร์ด Arduino UNO
- รันโค้ด Java/Processing บน Eclipse IDE หรือ Processing IDE เพื่อเปิดหน้าต่างเรดาร์เสมือน
แค่นี้ก็จะได้เรดาร์เสมือนแสดงผลบนหน้าจอล็อปท็อปแล้ว จัดไปวัยรุ่น! สู้งานนะน้อง
การทดสอบระบบ
ตอนนี้เรดาร์ Arduino ของน้องก็พร้อมลุยงานแล้วว่ะ วิธีเช็คก็ง่ายๆ แค่เอาไม้ขีดไฟหรืออะไรก็ได้มาวางไว้หน้าเซ็นเซอร์อัลตราโซนิก ถ้าต่อทุกอย่างถูกต้อง น้องจะเห็นเงาหรือภาพเสมือนของวัตถุปรากฏขึ้นมา
ลองทดสอบโดยวางวัตถุไว้หน้าเซ็นเซอร์ที่ระยะ 0-40 เซนติเมตรดู น้องจะเห็นการเปลี่ยนแปลงบนหน้าจอคอมพิวเตอร์ โดยจะมีเงาหรือสัญลักษณ์แสดงขึ้นตรงตำแหน่งจริงของวัตถุนั้นๆ
ถ้าเจอปัญหาหรือมีอะไรงงๆ ก็ถามมาได้เลยนะครับพี่น้อง สู้ๆ